背景
作者:DeepLearningStack,阿里巴巴算法工程师,开源TensorFlow Contributor]
欢迎大家关注我的公众号,“互联网西门二少”,我将继续输出我的技术干货~

使用GPU训练时,一次训练任务无论是模型参数还是中间结果都需要占用大量显存。为了避免每次训练重新开辟显存带来计算之外的开销,一般框架的做法是在真正的训练任务开始前,将每个节点的输入和输出,以及模型参数的shape计算出来并全局开辟一次,例如Caffe就是这种做法。随着深度学习模型的发展和迭代,不仅模型训练的数据shape可能发生变化,就连模型本身在训练过程中也可能发生变化,那么按照固定shape一次开辟显存的做法就不能满足需求了。为此,TensorFlow重新设计了较为灵活的显存管理机制,它使用了名为BFC的分配算法,并通过BFC Allocator为每个Tensor分配满足需求的显存。本节我们将一起窥探BFC Allocator的设计思想。
从Tensor的创建谈起
为Tensor分配存储区的时机
在进入主题之前,让我们先思考一个问题:TensorFlow中的Tensor究竟是何时拿到所需存储区的呢?答案是在Tensor对象被创建时就立即进行分配。在TensorFlow的一轮训练结束后,所有的Tensor都已经被释放,下一轮计算开始后会按照需求重新创建Tensor,并为其分配新的存储空间。下面的代码片段中我们可以看到Tensor创建时,使用Allocator分配存储区的代码段。
在创建Tensor对象时需要传入一个Allocator,这个Allocator可以是任何实现类,在GPU上使用的就是BFCAllocator。
1 Tensor::Tensor(Allocator* a, DataType type, const TensorShape& shape) 2 : shape_(shape), buf_(nullptr) { 3 set_dtype(type); 4 CHECK_NOTNULL(a); 5 if (shape_.num_elements() > 0 || a->ShouldAllocateEmptyTensors()) { 6 CASES(type, buf_ = new Buffer<T>(a, shape.num_elements())); 7 } 8 if (buf_ != nullptr && buf_->data() != nullptr && LogMemory::IsEnabled()) { 9 LogMemory::RecordTensorAllocation("Unknown", LogMemory::UNKNOWN_STEP_ID, 10 *this); 11 } 12 }
上面代码的第6行创建了Buffer对象,它就是Tensor对象的实际存储区,让我们看看其构造函数的实现内容。
1 emplate <typename T> 2 Buffer<T>::Buffer(Allocator* a, int64 n, 3 const AllocationAttributes& allocation_attr) 4 : BufferBase(a, a->Allocate<T>(n, allocation_attr)), elem_(n) {}
上面的代码段重点在于第4行,因为在此处调用了Allocate函数,此时Buffer真正获得了一片实际的存储区。这已经能够说明存储区分配的时机是在一个Tensor对象被创建时立即发生的。
遇到的问题——显存分配与回收的性能需求
Tensor在每次创建时会得到存储区域,而每一轮训练都要重新创建新的Tensor,那么这里面临的一个问题:如此频繁的分配和回收存储区,如何才能做的高效?试想对于GPU来说,如果Allocate函数直接封装CUDA中昂贵的cudaMalloc函数,当Tensor被释放时直接调用cudaFree函数,那么训练速度将会因为这些overhead大打折扣。
解决问题的基本思路——存储池
如果你对操作系统这门课比较熟悉,那么应该很容易想到解决办法:将显存按照不同的大小一次性开辟出来,并组成存储池,每次调用Allocate函数时从存储池中获取,Tensor回收时将显存重新挂到存储池中。这样做确实可以满足性能需求,但是需要为此设计一个相对复杂的存储管理器。BFC Allocator就是TensorFlow中管理GPU显存的存储管理器。
好了,需求和背景都已经了解了,接下来可以进入正题了,让我们先从原理开始说起。
Best-Fit with Coalescing与dlmalloc
BFC的全称是Best-Fit with Coalescing。从TensorFlow源码注释中得知,BFC算法并非TensorFlow完全原创,而是dlmalloc的一个简单实现版本。dlmalloc是一款优秀的存储分配器,它以Doug Lea的名字命名,这个站点包含了dlmalloc的详细说明,有兴趣的同学可以去看一看。之所以在TensorFlow中引入一个简单版本的dlmalloc算法,是因为该算法可以非常高效的按需分配和回收存储区,并尽可能减少存储碎片。
BFC Allocator基本原理
核心在于将存储区划分成块,并挂入存储池中进行管理。将存储区划分成存储块时要满足以下要求。
1. 块内地址是连续地址
2. 存储池中的块要以每个块基地址升序排列,并组织成双向链表
3. 高地址块的size大于低地址块的size
TensorFlow将存储块以及相应的块信息抽象为一种叫做Chunk的数据结构。
核心数据结构
Chunk
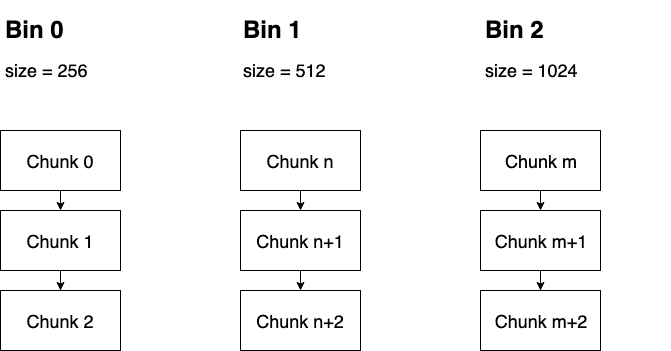
Chunk是BFC最核心的数据结构之一,在TensorFlow源码中是以struct来描述的。具体来说,一个Chunk代表一段连续的存储空间,BFC要求各个Chunk要按照基地址升序排列并组织成双向链表,下图展示了Chunk的结构以及Chunk之间的连接关系。初始时,每个Chunk都有自己的size,并且这些size都是以256字节为模。应当注意,每个Chunk或者完全被标记为使用,或者完全标记为空闲,不存在该Chunk内只有部分空间被使用的情况。

prev,next:这两个变量起到指针作用,分别指向前驱和后继Chunk。因为在BFC Allocator模块中多个chunk都被放入了vector中,所以这两个指针实际上就是前驱和后继的index
ptr:该Chunk的起始存储地址,或者叫基地址
size:该Chunk描述存储区的实际总大小,每个Chunk的size是不同的,但都以256字节为模
requested_size:该Chunk描述存储区的使用大小,代表了用户请求使用的大小,它一定小于等于size。因为Chunk不能被部分使用,所以即使用户实际只使用requested_size,那么也只能将整个大小为size的Chunk全部分配出去,显然这可能会造成一些碎片的浪费
allocation_id:该值如果不为0,则代表已经被标记为使用,反之则是空闲
bin_num:代表该Chunk所在Bin的Index。Bin是另一个核心数据结构,下面将会做详细介绍
Bin
如果我们想查询某一块符合条件的空闲Chunk并取出,那么只能对双向链表做遍历,显然这个效率不是很高。为了加速查询某块Chunk的速度,可以在创建Chunk链表时按一定顺序排列,并将整个有序链表在逻辑上切分成多个段,为每个段记录所包含的Chunk的范围,这种结构就是Bin,它相当于一种索引。因此,Bin结构是为了方便Chunk的查询而出现的。在BFC Allocator中,每个段中Chunk的顺序是按照size和基地址升序排序的,每个Bin都设有自己的bin_size,该bin_size表示该段包含的最小Chunk的size。这样一来,用户端就可以根据所需要申请的Memory大小直接找到对应的Bin,然后在该Bin中遍历寻找适合的Chunk。为了能够根据bin_size直接定位到Bin,规定bin_size与bin_num的大小关系为:bin_size=256 * 2bin_num。用户在申请Memory时,会将实际大小映射到最适合的bin_size上,然后再根据bin_size与bin_num的关系找到对应的Bin,进而在该段中遍历搜索。
Bin中Chunk的是通过Set组织的,为了能在Set中体现双向链表的逻辑,只需要让Chunk在Set中按照规则升序排列,并修正前驱后继指针即可。指定Chunk顺序的Comparator代码段定义在Bin结构中,如下所示。
1 // Sort first by size and then use pointer address as a tie breaker. 2 bool operator()(const ChunkHandle ha, 3 const ChunkHandle hb) const NO_THREAD_SAFETY_ANALYSIS { 4 const Chunk* a = allocator_->ChunkFromHandle(ha); 5 const Chunk* b = allocator_->ChunkFromHandle(hb); 6 if (a->size != b->size) { 7 return a->size < b->size; 8 } 9 return a->ptr < b->ptr; 10 }
辅助工具类
AllocationRegion与RegionManager
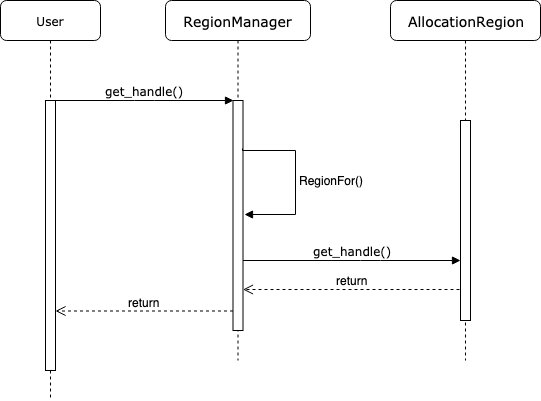
这两个类是起到辅助作用。BFC Allocator每次分配存储区时都以Chunk为单位,指向Chunk的指针又是ChunkHandle类型(实际为数组下标),但分配存储的最终目的是把Chunk中指向存储区域的头指针ptr分配给请求方。另外,当系统回收存储区时,面对的也是存储区的头指针,那么如果不能根据头指针找到Chunk和Bin信息,回收就不能成功。因此这里显然应该设计一系列接口和函数:它能够记录每次分配的Chunk,并且能够保存分配存储区的地址ptr与Chunk之间的映射关系。AllocationRegion和RegionManager就是完成这些功能的接口。
具体而言,AllocationRegion对应一次存储区分配的记录。一次存储区分配的信息包括起始地址ptr和存储区大小memory_size,这可能包括多个Chunk,所以该结构要记录此次分配中所包含所有Chunk的信息。RegionManager是AllocationRegion的管理器,它维护了AllocationRegion的数组。在RegionManager中,AllocationRegion数组是需要按照end_ptr地址排序的。
利用RegionManager查询某个ptr所对应的ChunkHandle的时序图如下图所示。
这部分功能较为简单,所以不再展开代码逻辑,感兴趣的同学可以阅读这两个类的定义立即就能理解。
BFC分配与回收策略
介绍完基本结构和BFC的设计思想之后,就可以试着去理解具体的存储区分配和回收过程了。
Allocate流程
AllocateRawInternal
这是BFCAllocator的为用户分配Chunk的总体流程。因为物理设备上实际的空闲存储区已经被事先开辟好,并以Chunk的形式组织成了双向链表,那么BFC Allocator为用户分配存储区时直接从Chunk中获取即可。当双向链表中找不到合适的Chunk时,不得不向物理设备上申请更多存储空间,并创建新的Chunk放入到双向链表中,并挂入到B相应的Bin中。下面的流程图展示了这一过程,该过程涉及到了几个比较重要的子过程。它们分别是遍历搜索寻找最佳Chunk指针的FIndChunkPtr过程,当Chunk链表中不存在合适的Chunk以至于不得不向物理设备申请新存储空间的Extend过程,以及分配Chunk时为缓解碎片问题而出现的SplitChunk过程。
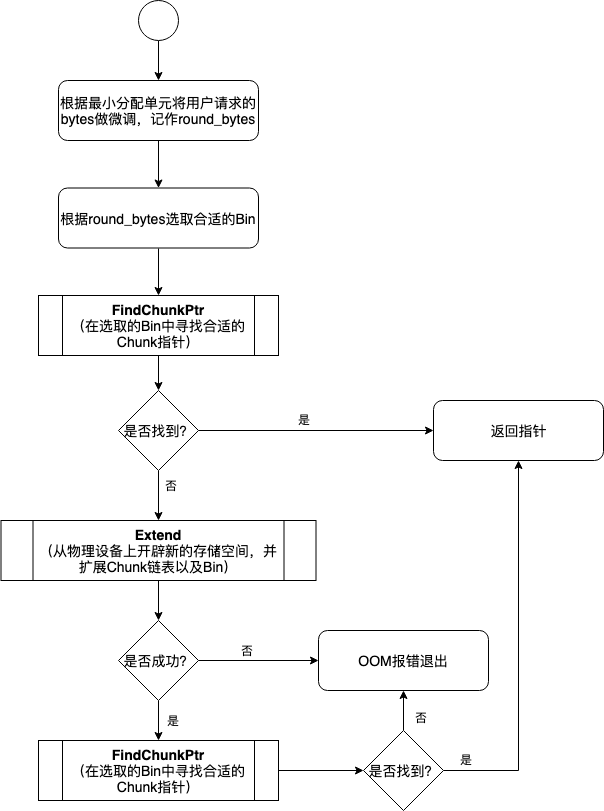
整体流程的代码如下所示。
1 void* BFCAllocator::AllocateRawInternal(size_t unused_alignment, 2 size_t num_bytes, 3 bool dump_log_on_failure, 4 uint64 freed_before) { 5 if (num_bytes == 0) { 6 VLOG(2) << "tried to allocate 0 bytes"; 7 return nullptr; 8 } 9 // First, always allocate memory of at least kMinAllocationSize 10 // bytes, and always allocate multiples of kMinAllocationSize bytes 11 // so all memory addresses are nicely byte aligned. 12 size_t rounded_bytes = RoundedBytes(num_bytes); 13 14 // The BFC allocator tries to find the best fit first. 15 BinNum bin_num = BinNumForSize(rounded_bytes); 16 17 mutex_lock l(lock_); 18 void* ptr = FindChunkPtr(bin_num, rounded_bytes, num_bytes, freed_before); 19 if (ptr != nullptr) { 20 return ptr; 21 } 22 23 // Try to extend 24 if (Extend(unused_alignment, rounded_bytes)) { 25 ptr = FindChunkPtr(bin_num, rounded_bytes, num_bytes, freed_before); 26 if (ptr != nullptr) { 27 return ptr; 28 } 29 } 30 31 // We searched all bins for an existing free chunk to use and 32 // couldn't find one. This means we must have run out of memory, 33 // Dump the memory log for analysis. 34 if (dump_log_on_failure) { 35 LOG(WARNING) << "Allocator (" << Name() << ") ran out of memory trying " 36 << "to allocate " << strings::HumanReadableNumBytes(num_bytes) 37 << ". Current allocation summary follows."; 38 DumpMemoryLog(rounded_bytes); 39 LOG(WARNING) << RenderOccupancy(); 40 } 41 return nullptr; 42 }
FindChunkPtr过程
因为Chunk在每个Bin中都是按照size和基地址升序排列,所以搜索Chunk时只需顺序遍历free_chunks即可,首个找到的符合要求的Chunk即为所求。这个过程非常简单,不再以图的形式描述,只展示代码如下。
1 void* BFCAllocator::FindChunkPtr(BinNum bin_num, size_t rounded_bytes, 2 size_t num_bytes, uint64 freed_before) { 3 // First identify the first bin that could satisfy rounded_bytes. 4 for (; bin_num < kNumBins; bin_num++) { 5 // Start searching from the first bin for the smallest chunk that fits 6 // rounded_bytes. 7 Bin* b = BinFromIndex(bin_num); 8 for (auto citer = b->free_chunks.begin(); citer != b->free_chunks.end(); 9 ++citer) { 10 const BFCAllocator::ChunkHandle h = (*citer); 11 BFCAllocator::Chunk* chunk = ChunkFromHandle(h); 12 DCHECK(!chunk->in_use()); 13 if (freed_before > 0 && freed_before < chunk->freed_count) { 14 continue; 15 } 16 if (chunk->size >= rounded_bytes) { 17 // We found an existing chunk that fits us that wasn't in use, so remove 18 // it from the free bin structure prior to using. 19 RemoveFreeChunkIterFromBin(&b->free_chunks, citer); 20 21 // If we can break the size of the chunk into two reasonably large 22 // pieces, do so. In any case don't waste more than 23 // kMaxInternalFragmentation bytes on padding this alloc. 24 const int64 kMaxInternalFragmentation = 128 << 20; // 128mb 25 if (chunk->size >= rounded_bytes * 2 || 26 static_cast<int64>(chunk->size) - rounded_bytes >= 27 kMaxInternalFragmentation) { 28 SplitChunk(h, rounded_bytes); 29 chunk = ChunkFromHandle(h); // Update chunk pointer in case it moved 30 } 31 32 // The requested size of the returned chunk is what the user 33 // has allocated. 34 chunk->requested_size = num_bytes; 35 // Assign a unique id and increment the id counter, marking the 36 // chunk as being in use. 37 chunk->allocation_id = next_allocation_id_++; 38 39 // Update stats. 40 ++stats_.num_allocs; 41 stats_.bytes_in_use += chunk->size; 42 stats_.peak_bytes_in_use = 43 std::max(stats_.peak_bytes_in_use, stats_.bytes_in_use); 44 stats_.largest_alloc_size = 45 std::max<std::size_t>(stats_.largest_alloc_size, chunk->size); 46 47 VLOG(4) << "Returning: " << chunk->ptr; 48 if (VLOG_IS_ON(4)) { 49 LOG(INFO) << "A: " << RenderOccupancy(); 50 } 51 return chunk->ptr; 52 } 53 } 54 } 55 56 return nullptr; 57 }
SplitChunk过程
上图中没有展示出SplitChunk发生的位置,其实该过程是在FindChunkPtr中发生。在选取Chunk时,会有一定概率出现请求的size比所选的Chunk总size小很多的情况。因为每块Chunk只有in use或free两种状态,所以如果空闲的size比请求的size大很多,显然会造成该Chunk的实际使用率过低,这是一种浪费。BFC Allocator通过调用SplitChunk将Chunk分割成两部分来缓解这一问题。SplitChunk的功能顾名思义,就是将一块大的Chunk分割成两个部分。该过程发生在FindChunkPtr中,我们需要注意触发SplitChunk过程的条件,在代码中我们能看到这一函数的调用条件如下。
1 // If we can break the size of the chunk into two reasonably large 2 // pieces, do so. In any case don't waste more than 3 // kMaxInternalFragmentation bytes on padding this alloc. 4 const int64 kMaxInternalFragmentation = 128 << 20; // 128mb 5 if (chunk->size >= rounded_bytes * 2 || 6 static_cast<int64>(chunk->size) - rounded_bytes >= 7 kMaxInternalFragmentation) { 8 SplitChunk(h, rounded_bytes); 9 chunk = ChunkFromHandle(h); // Update chunk pointer in case it moved 10 }
从代码中可以清晰的看到,当以下两个条件之一满足时,SplitChunk过程将被触发。
1. 当chunk的size是用户请求的round size两倍及以上时(用户请求的size会根据最小分配单元做round近似)
2. 当chunk的size减去用户请求的round size后依然大于等于最大碎片限定时(128MB)
在执行SplitChunk时,需要调整Chunk的前驱后继指针,这就是链表的基本操作,非常简单。另外,SplitChunk会产生新的Free Chunk,需要根据它的大小将它插入到对应的Bin中。
Extend过程
上面的流程图已经展示,只有在双向链表中不能找到合适的Chunk时,Extend过程才会被调用。它的调用说明现有的存储池中已经没有可以满足需求的存储区了,需要向物理设备申请,并创建新的Chunk,然后放入Bin中。向物理设备申请存储空间时,如果因为一次申请的空间较大而失败,会将请求空间做0.9因子的衰退,下面的代码段展示了这个细节。申请结束后,需要向region_manager中记录该次申请。
1 // Try allocating. 2 size_t bytes = std::min(curr_region_allocation_bytes_, available_bytes); 3 void* mem_addr = sub_allocator_->Alloc(alignment, bytes); 4 if (mem_addr == nullptr && !started_backpedal_) { 5 // Only backpedal once. 6 started_backpedal_ = true; 7 8 static constexpr float kBackpedalFactor = 0.9; 9 10 // Try allocating less memory. 11 while (mem_addr == nullptr) { 12 bytes = RoundedBytes(bytes * kBackpedalFactor); 13 if (bytes < rounded_bytes) break; 14 mem_addr = sub_allocator_->Alloc(alignment, bytes); 15 } 16 }
Deallocate流程
因为在回收时只知道存储空间首地址指针,并不知道其对应的Chunk,所以需要先借助region_manager等辅助工具获取其所对应的Chunk指针,然后考虑其前驱后继节点是否可以合并。下面展示了整体流程。因为Merge的过程即使链表合并的过程,比较简单,所以在此不再赘述。
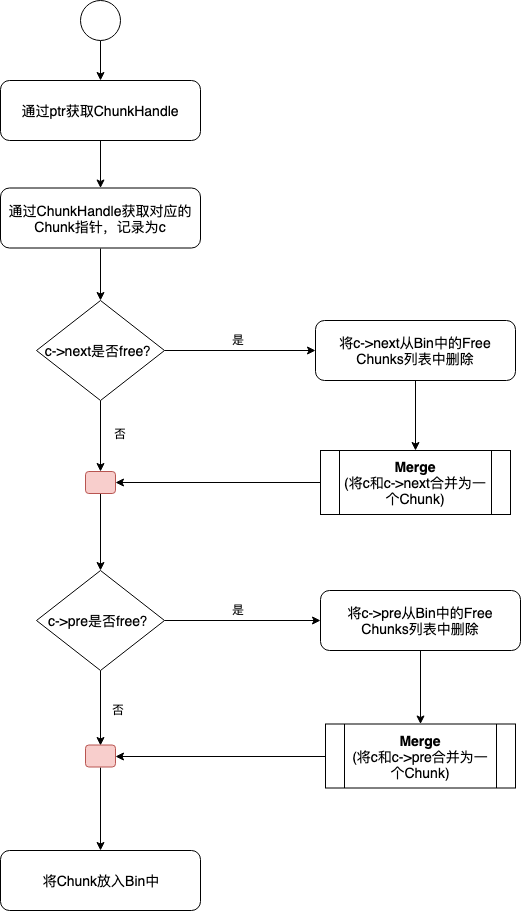
这部分对应的代码逻辑如下图所示。
1 void BFCAllocator::FreeAndMaybeCoalesce(BFCAllocator::ChunkHandle h) { 2 Chunk* c = ChunkFromHandle(h); 3 CHECK(c->in_use() && (c->bin_num == kInvalidBinNum)); 4 5 // Mark the chunk as no longer in use. 6 c->allocation_id = -1; 7 8 // Optionally record the free time. 9 if (timing_counter_) { 10 c->freed_count = timing_counter_->next(); 11 } 12 13 // Updates the stats. 14 stats_.bytes_in_use -= c->size; 15 16 ChunkHandle coalesced_chunk = h; 17 18 // If the next chunk is free, merge it into c and delete it. 19 if (c->next != kInvalidChunkHandle && !ChunkFromHandle(c->next)->in_use()) { 20 // VLOG(8) << "Merging c->next " << ChunkFromHandle(c->next)->ptr 21 // << " with c " << c->ptr; 22 RemoveFreeChunkFromBin(c->next); 23 Merge(h, c->next); 24 } 25 26 // If the previous chunk is free, merge c into it and delete c. 27 if (c->prev != kInvalidChunkHandle && !ChunkFromHandle(c->prev)->in_use()) { 28 // VLOG(8) << "Merging c " << c->ptr << " into c->prev " 29 // << ChunkFromHandle(c->prev)->ptr; 30 31 coalesced_chunk = c->prev; 32 RemoveFreeChunkFromBin(c->prev); 33 Merge(c->prev, h); 34 } 35 36 InsertFreeChunkIntoBin(coalesced_chunk); 37 }
Allow Growth
这是控制Allocator的一个选项,默认是False,此时会在设备上开辟最大限度的存储空间,并且全局只开辟一次。因为已经开辟了设备上的全部存储空间,所以若在双向链表中找不到合适的Chunk,那么将会直接报错OOM退出。当选项为True时,会经历多次存储空间的开辟,这完全取决于当前存储池中是否还有符合需求大小的Chunk。如果没有,则不断以2的n次方为基本大小进行开辟尝试,直到满足需求为止。那么这个值有什么用处呢?这取决于同一个Device是否允许被多个程序复用。比如在云基础设施上,如果能够开启Device复用,并打开Device的空分复用功能,那么将会大大提高集群资源的利用率。
总结
本文总结了TensorFlow中存储管理器——BFC Allocator。它的设计思路来自于经典来的dlmalloc分配算法,是Best fit coalecing的简单实现版本。BFC Allocator是为了应对TensorFlow中频繁分配释放存储空间需求的场景而出现的解决方案,通过事先将存储空间从物理设备上开辟好,并将这些空闲存储空间封装成Chunk,组织成有序双向链表,然后利用Bin这一种索引结构为Chunk的查询做加速,最终完成了高效的分配算法。在实际分配时,可能会遇到Chunk链表中不存在符合要求的空闲Chunk情况,这时候就可能需要向物理设备中再次开辟新的存储空间,这个过程被视为对Chunk链表的扩展,对应的过程是Extend。因为是按Chunk进行分配,势必可能造成存储碎片,为了解决碎片问题,BFC Allocator设计了SplitChunk和Merge函数。BFC Allocator是TensorFlow代码中比较精简的一个部分,该部分的代码难度较低,并且模块独立性较强,涉及到的代码量非常小,但是设计思想和功能却非常全面,非常适合初学者阅读和学习。