创建任务:
void vTask1( void * pvParameters );//Task1 TaskHandle_t task1TaskHandle= NULL; //句柄 int main(void) { BaseType_t os=0; LED_init(); delay_init();
taskENTER_CRITICAL();//进入临界区,临界保护 //任务的创建 os= xTaskCreate( (TaskFunction_t ) vTask1, //任务函数 (const char * ) "task1", //任务名字 (configSTACK_DEPTH_TYPE) 128, //任务内存大小 (void * ) NULL, //传递给任务函数的参数 (UBaseType_t ) 1, //数字越小 优先级越高 (TaskHandle_t * ) task1TaskHandle //句柄 ); if(os==pdPASS)//创建成功 GPIO_ResetBits(GPIOA, GPIO_Pin_8); taskEXIT_CRITICAL();//退出临界区 临界区是为了防止初始化被其他任务打断(一般在重要的地方加入) vTaskStartScheduler(); //开启任务调度 while(1) {} } //任务1 void vTask1( void * pvParameters ) { while(1) { GPIO_SetBits(GPIOA, GPIO_Pin_8); delay_ms(500); GPIO_ResetBits(GPIOA, GPIO_Pin_8); delay_ms(500); // Task code goes here. } }
创建任务后,程序卡在调度函数里:
进一步定位:发现卡到触发SVC中断的地方,由于工程中没有SVC_Handle()函数,导致第一个任务无法在SVC中开启
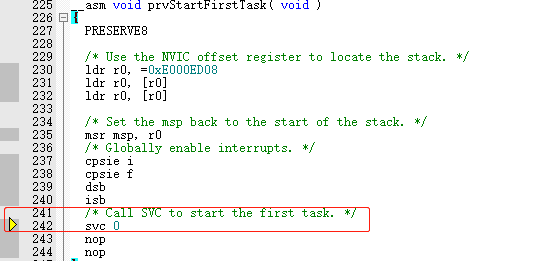
解决办法:在FreeRTOSConfig.h文件中加入这两个宏定义,和FreeRTOS里面对应的函数进行关联,就可以了
1 #define xPortPendSVHandler PendSV_Handler 2 #define vPortSVCHandler SVC_Handler
任务调度:

参考链接:
https://blog.csdn.net/tao475824827/article/details/105622087