为什么增益裕度可以是负数
参见: 为什么增益裕度可以是负数 - 马昭鑫的博客 | MaZhaoxin's Blog
(93条消息) 相位裕度的个人理解_Tongji_joie的博客-CSDN博客_相位裕度
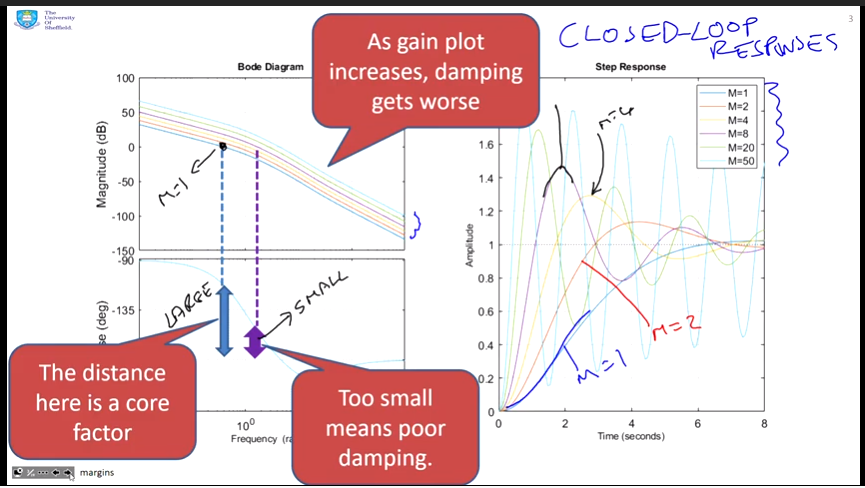
根据百度百科的解释:相位裕度(phase margin,PM),亦称相位余裕,在电路设计中是非常重要的一个指标,主要用来衡量负反馈系统的稳定性,并能用来预测闭环系统阶跃响应的过冲。
所以说,相位裕度是闭环系统特有的一个参数,用于预测闭环系统动态性能的两个指标之一的过冲幅度(overshoot),也就是超调,过冲幅度越小,他的相位裕度就越大。系统就越稳定,但同时时间响应速度也会减慢。足够的相角裕度
系统开环频率特性上幅值为1时所对应的角频率称为幅值穿越频率或截止频率,记为ω,即:
相角裕度γ的含义是,对于闭环稳定系统,如果系统开环相频特性再滞后γ度,则系统将处于临界稳定状态。
由于过冲(Overshooting)的大小与相位裕度有关(Overshoot as a Function of Phase Margin)
一个性能良好的控制系统,其相位裕度应具有45°左右的数值。一说60°,不宜过大过小,过大,系统响应缓慢,说明控制增益小了,过小 ,响应变快,但是处于欠阻尼状态,有震荡,但是接近不稳定状态。
看下图:
(这里提到了GM对于有些闭环稳定系统来说可以是负值,但是PM只能为正值)
可以使用MATLAB 中的sisotool 工具进行增益设计
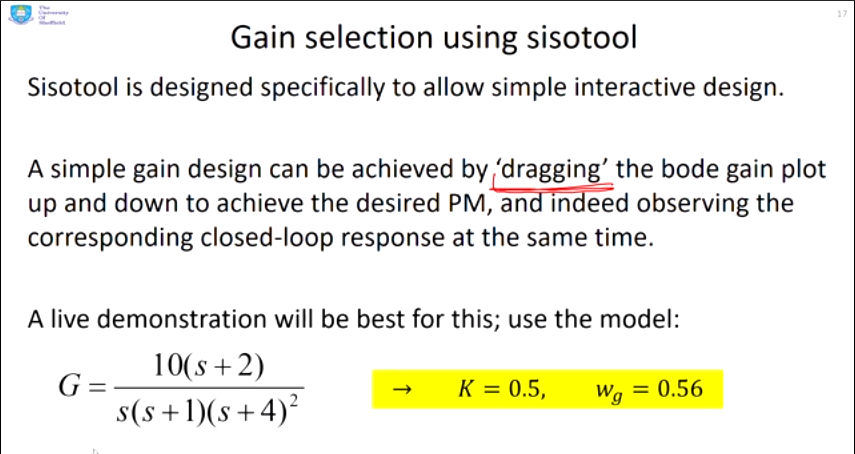
参考:https://www.youtube.com/watch?v=UFhx1jtWYfA
视频中讲了如何在给定的PM的条件下,找到穿越频率