本教程主要是演示如何安装ROS,所使用的系统是Ubuntu 18.04。
以下分为三部分:
- 更改apt源
- 按照ROS官网给出的安装教程进行安装
- 测试是否安装成功
1. 更改apt源
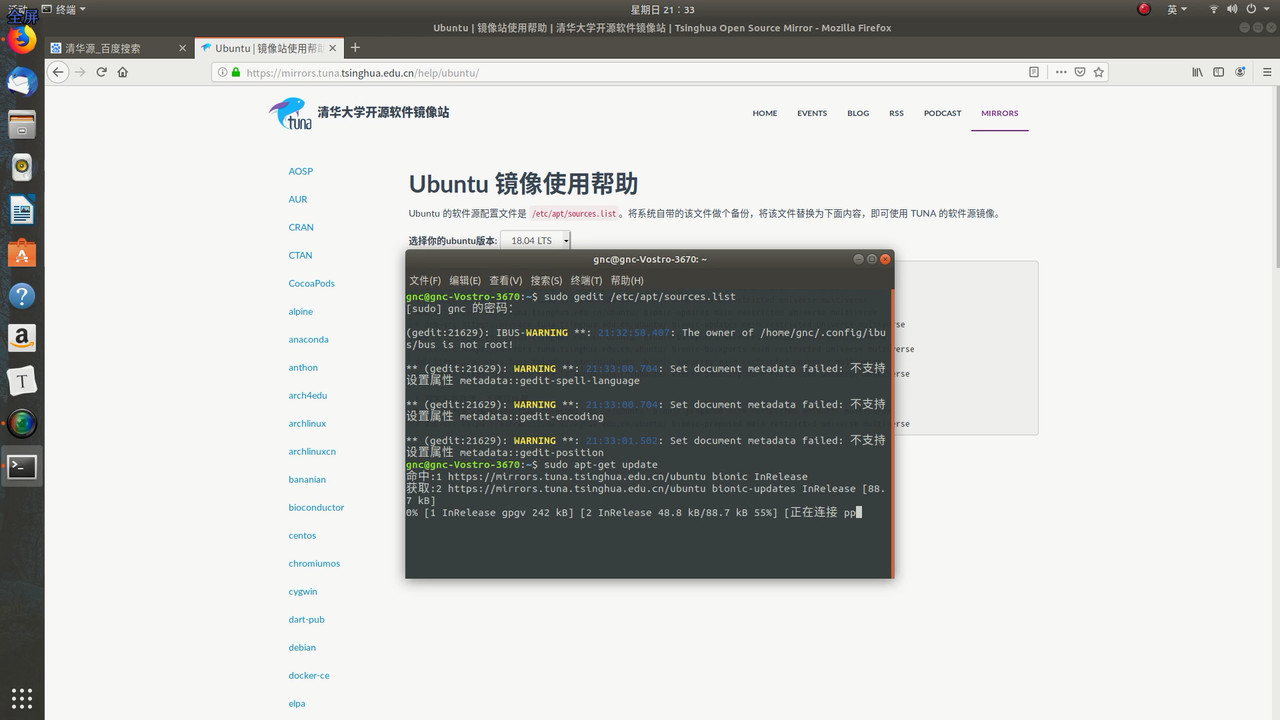
百度搜索清华源,然后单击页面右下角的使用帮助,然后划到最下面找到ubuntu,此时页面如图:

然后我们将编辑框中的文字复制,按下Ctrl+Alt+T打开终端,在终端下输入sudo gedit /etc/apt/sources.list打开sources.list文件,删除文件内容,并将刚才复制的内容粘贴进去,然后在终端下输入sudo apt-get update。
2. 按照ROS官网给出的安装教程进行安装
然后我们打开ROS安装教程,选择Ubuntu,等待页面加载完成后就可以按照步骤来完成安装。
步骤1.1
我没有进行1.1步骤,但最后也是安装成功了。
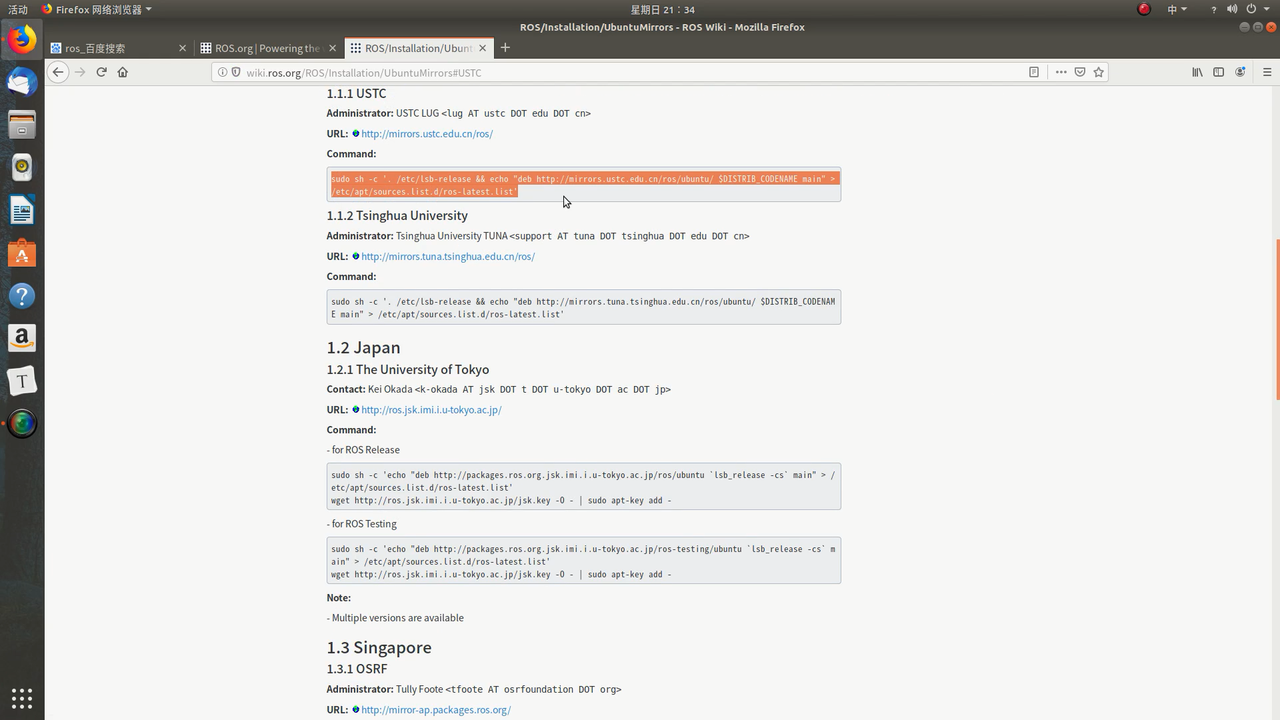
步骤1.2
在这一步要点击Mirror链接,进入后选择一个国内的源,防止更新速度太慢。我选择了USTC这个源。
步骤1.3~1.7
在完成步骤1.2之后,步骤1.3~1.7只需要按照页面指导进行完成即可,不过要注意的是有可能因为网络原因更新速度较慢,可以尝试使用手机热点来改善。
3. 测试是否安装成功
在完成步骤1.1~1.7之后,如果没有出现其它问题,那么正常来说,你已经成功安装了ROS,下面我们运行一个简单的程序来测试ROS是否安装成功。
打开一个终端在终端下输入roscore,这句命令主要是启动ros的核心程序。

然后再新建一个终端,输入rosrun turtle_sim turtlesim_node。
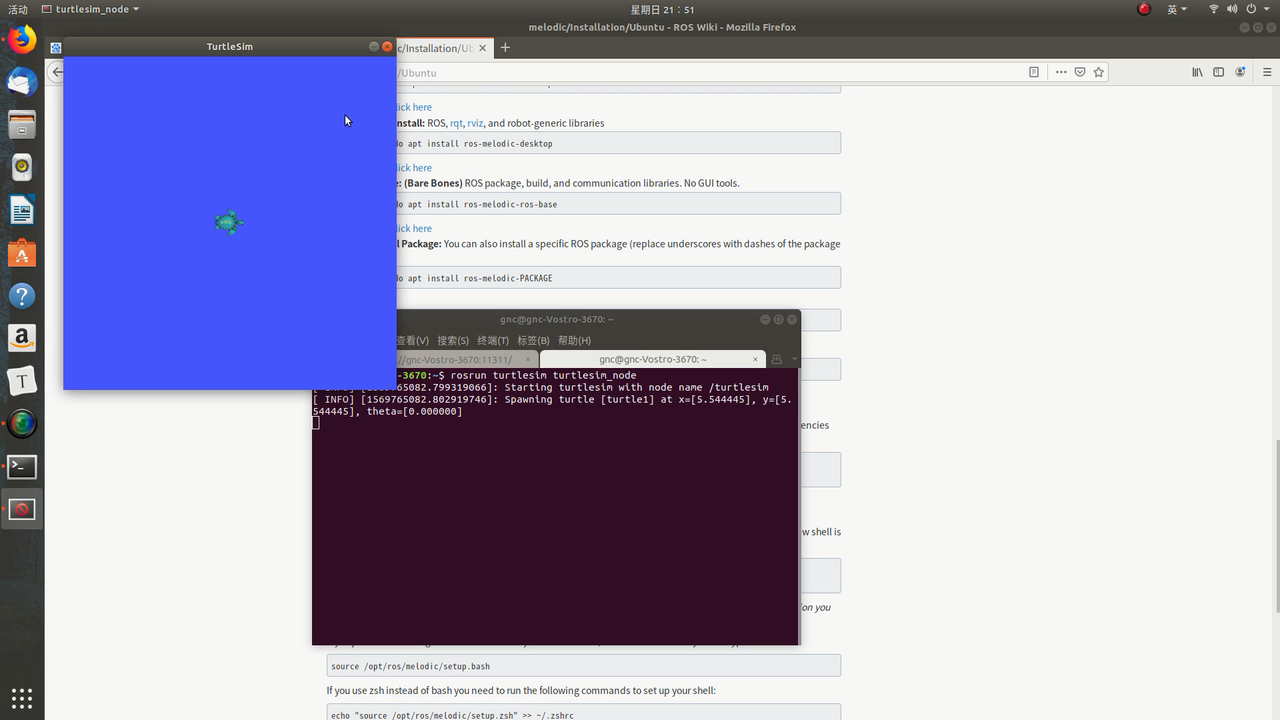
如果成功弹出了以上的窗口。祝贺你!证明你已经成功安装了ROS。
视频
以上的安装过程我录制了一个视频,如果只看文字还不明白的话,可以对照着视频进行安装。