磁场
磁场和电场类似,磁场是一种看不见、摸不着的特殊物质,磁场不是由原子或分子组成的,但磁场是客观存在的。磁场具有波粒的辐射特性。磁体周围存在磁场,磁体间的相互作用就是以磁场作为媒介的,所以两磁体不用接触就能发生作用。电流、运动电荷、磁体或变化电场周围空间存在的一种特殊形态的物质。由于磁体的磁性来源于电流,电流是电荷的运动,因而概括地说,磁场是由运动电荷或电场的变化而产生的。
磁极
条形磁铁由两个极组成,分别为北(N)和南(S)。磁场在两极最强。磁力线从北极出发,进入南极。

磁极同样存在同性相斥,异性相吸现象。
电和磁有一个很大的不同。电有两个极,两极可以单独出现(单独的正极/负极);但是磁极总是成对出现,单独的极是不存在的。

安培定则
安培定则,也叫右手螺旋定则,是表示电流和电流激发磁场的磁感线方向间关系的定则。
通电直导线中的安培定则(安培定则一):用右手握住通电直导线,让大拇指指向直导线中电流方向,那么四指指向就是通电导线周围磁场的方向;
通电螺线管中的安培定则(安培定则二):用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端是通电螺线管的N极。
磁感应强度
我们定义电场强度是通过静电力,电场强度是单位电荷所受到的静电力。
磁力是不是磁荷乘以磁场强度?
不是,因为我们暂时还没有发现磁单极。如果有磁单极,就没问题。
取一个电荷量为 (q) 的电荷,电荷运动速度是 (v) ,周围存在磁场。
实验显示,电荷受到的力总是垂直于它速度的方向。即
因为磁场力永远垂直于速度方向,所以磁场力永远不会对电荷做功。
这个力的大小正比于电荷的速度,同时正比于电荷本身的大小。
定义:
其中,B是磁感应强度,v是电荷速度,两者叉乘。
注意是叉乘。因为叉积的几何意义在三维中,就是两个向量叉积后,得到的向量与这两个向量垂直。有洛伦兹力,她和电荷有效运动(速度)方向,磁感应强度方向三者一定是一个垂直关系。
磁场强度 (B) 在国际单位中,单位是特斯拉(T)。
1T是非常强的磁场,因此我们经常用高斯(G)作为单位,高斯与特斯拉换算为
地球的磁场大概是半高斯。
洛伦兹力
运动电荷在磁场中所受到的力称为洛伦兹力。单位是牛顿。
彩色电视内部的电子枪会对屏幕进行光栅扫描,电子束的强弱变换产生出图像,如果在电视周围放一个很强的磁铁,她就会扭曲图像,因为她影响到电子的运动。如果显像管被严重磁化后就造成永久性损伤。(懂了懂了明天就给老友送一个……)
如果电荷周围有电场也有磁场的话,例如当电荷在载流导线附近移动时,合力 (F_s)是电场力和磁场力的矢量和:
根据洛伦兹力的定义,这个合力也可以说是洛伦兹力。
通电导线上电流为 (I) 。磁场在导线各个位置上完全可能是不同的。
电流上一个电荷 (+dq) ,正以漂移速度 (V_d) 通过导线。
思考一下,电流是0的时候,因为此时电荷属于热运动,是随机运动,电荷上合力为0。当电流不等于0时,电荷移动,合力不为0.
为什么要用正电荷?电流不是电子移动产生的吗?是的,只是出于数学上的考虑,负电荷乘以矢径,等价于正电荷乘以相反方向的矢径。只是根据电流方向的定义考虑,用正电荷描述方便。
假设 (V_d) 与 (B) 夹角为 ( heta) ,磁场力为
因为电流是单位时间内流过的电荷量:
故
又根据经典力学,速度乘以时间等于距离:
(dl) 是沿导线的一段距离。
故
从这个式子可知,(doverset{ ightharpoonup }{F_B}) 是这一段 (overset{ ightharpoonup }{dl}) 上所受到的力,(overset{ ightharpoonup }{B}) 是 (dl) 局部的磁感应强度。
如果想知道整个导线上受到的力,必须沿整个导线积分,并且要确定每一小段 (dl) 上的 (overset{ ightharpoonup }{B}) 。这样每一小段都得到一个力,再叠加。有点繁琐,但这是基本思想。
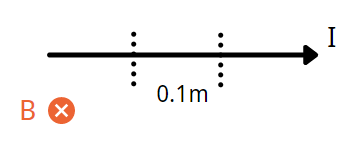
简化计算,只能简化模型,假如一条通电直导线,电流为 (300A) ,在 (l=0.1m) 范围内,磁场保持 (0.2T) 恒定,垂直纸面向里。
因为速度与磁场夹角是90度,很容易得到这段长度上的洛伦兹力大小:
通电线圈(电动机)
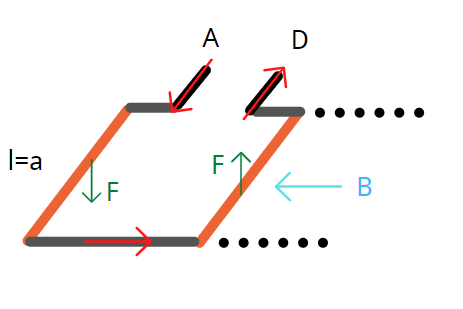
假设一个通电线圈,红色箭头表示电流流向,虚线区域内有从右到左的一个恒定均匀的磁感应强度为 (overset{ ightharpoonup }{B}) 的磁场。通电线圈的左右两臂(黄色表示)会受到磁场力 (overset{ ightharpoonup }{F}),灰色区域由于电流流向与磁场方向平行,所以叉积为0,不会受到磁场力。通过左手定则,可以判断力的方向。
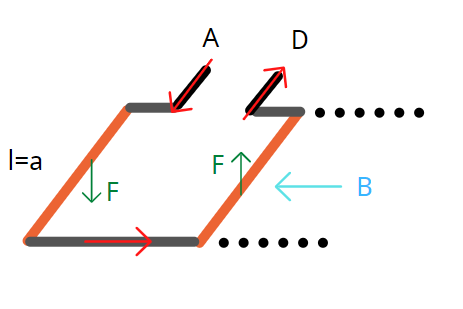
如果左右两臂的长度为 (a) 。则
两个臂的力大小相等,方向相反,使得线圈逆时针旋转。
某个时刻,旋转90°后,力矩变为0。但是由于惯性,会继续旋转,逆时针旋转超过90°后,力矩就会反过来。其实通过D、A位置就能看出,旋转180°后,D在左边,A在右边。然后翻转过来,来回摆动。显然这不能算是电动机。
所以需要一个滑动的机械结构-电刷和换向器。
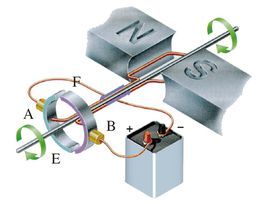
电刷是与运动件作滑动接触而形成电连接的一种导电部件。电刷是用于换向器或滑环上,作为导入导出电流的滑动接触体。
结构上,换向器是几个接触片围成圆型,分别连接转子上的每个触头,外边连接的两个电极称为电刷与之接触,同时只接触其中的两个。
通过电刷和换向器,每一次旋转,电流就会自动的改变方向,解决了力矩反转的问题,并且解决了旋转过程中导线缠绕的问题。