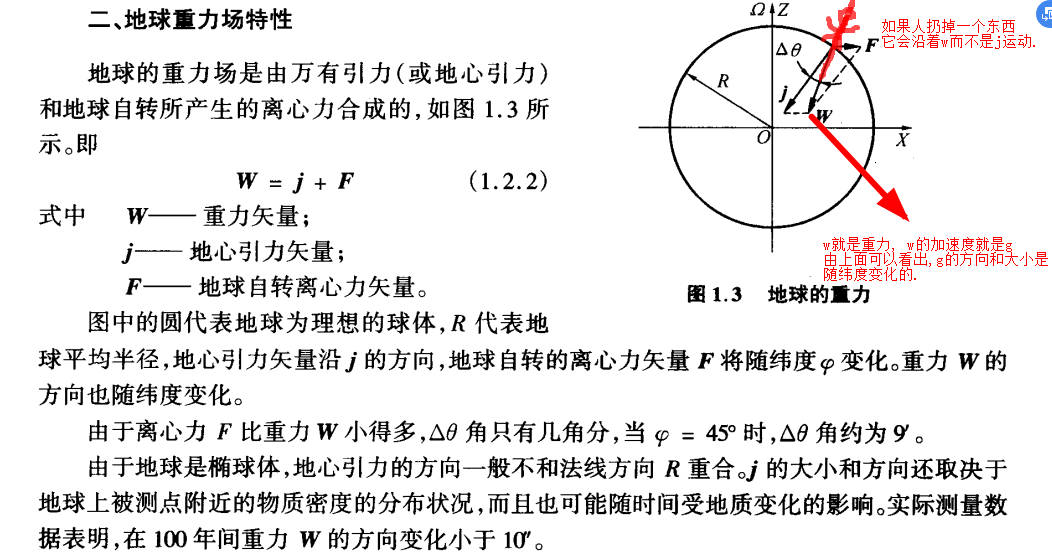
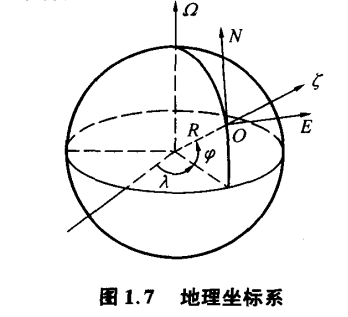
地球重力







以上两个坐标系是为了确定地球的。



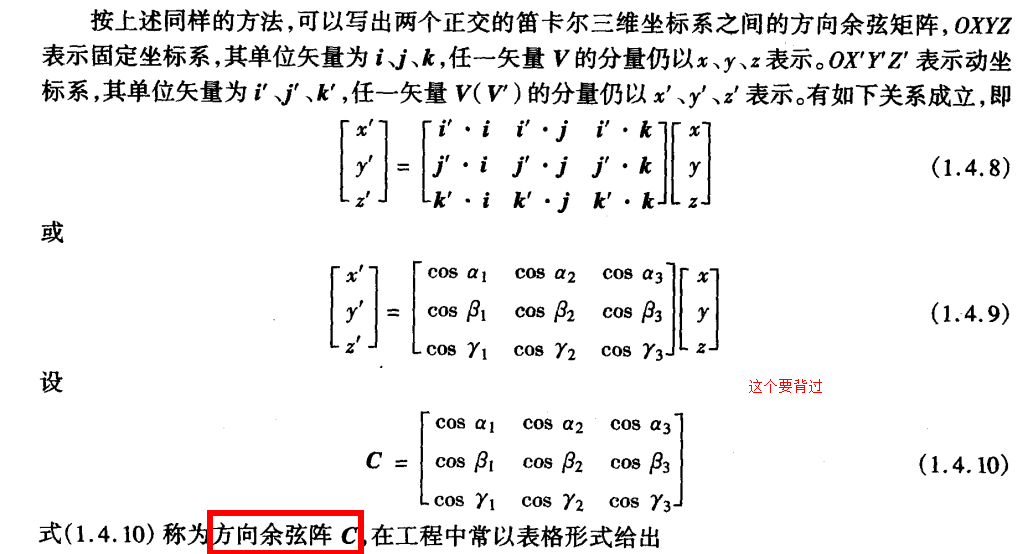
矩阵就是对坐标系的变化描述,矩阵的乘积,就代表着坐标系的转换。
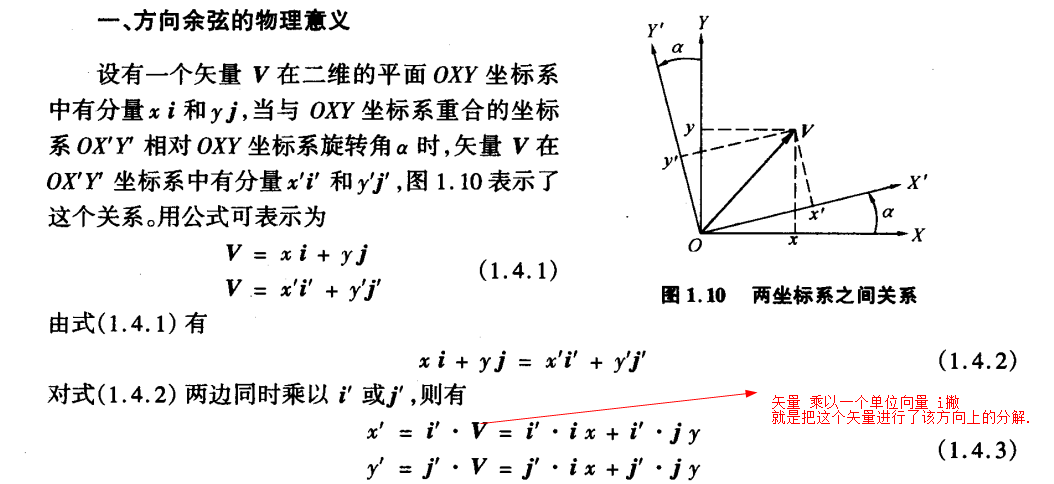
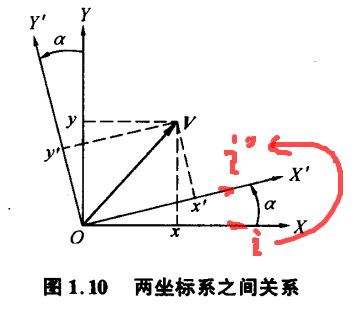
上面式子还是使用的点乘。

有的时候推到数学公式,过程很重要,要有流畅的过程。
所以推到的过程中,只要遵守规则,就行,一些含义可以暂时忽略一下。只要知道头和尾的含义。
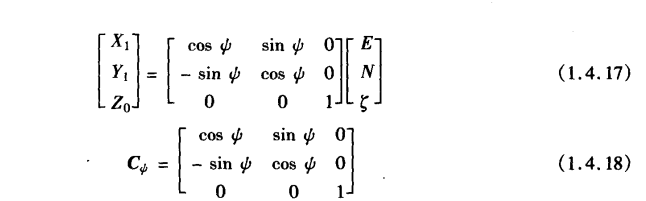
上面最终结果的C就是:方向余弦矩阵。



然后:
举个例子:
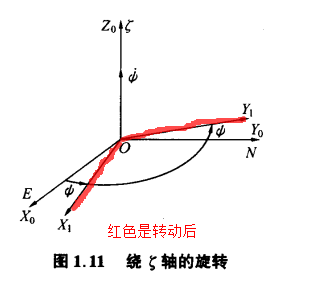
这是第一次转动,角标是1
角标是0的,是原来的坐标系,即转动前的。
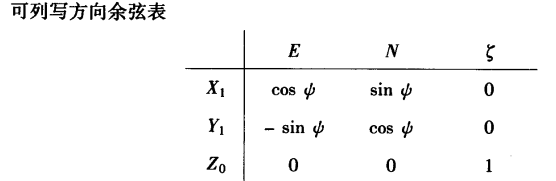
套用公式得:
1.5用四元数表示坐标变换
四元数又叫做四维数,为了更简便地描述刚体的角运动.
用来弥补通常描述刚体角运动的三个欧拉角参数在设计控制系统时的不足(存在锁死的问题)
它是属于代数的知识.
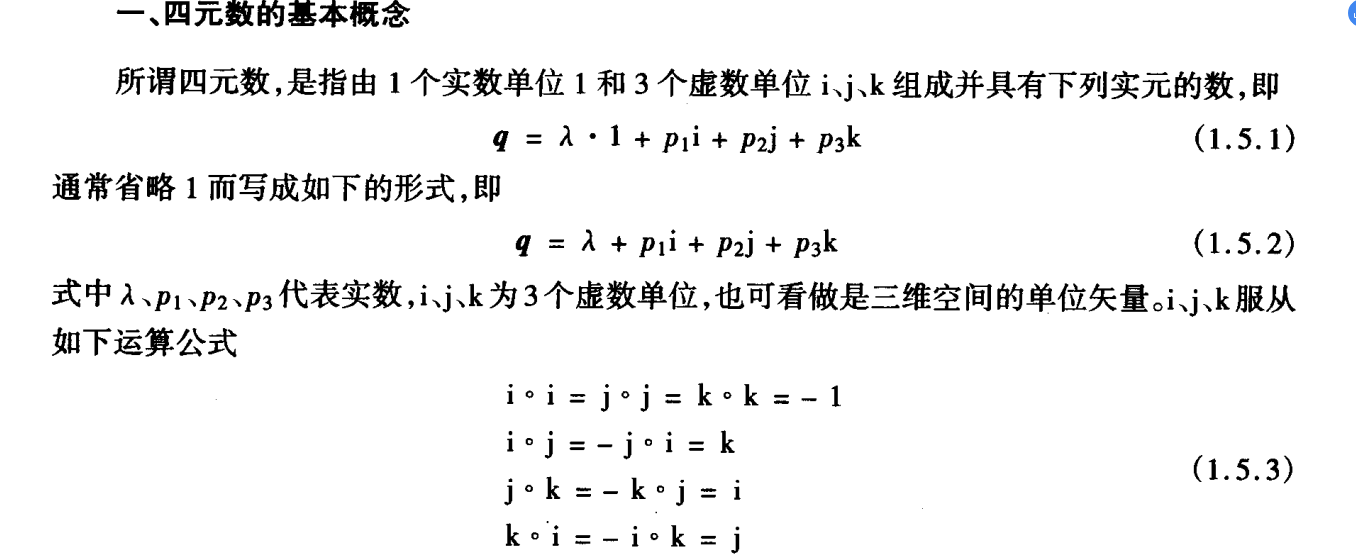




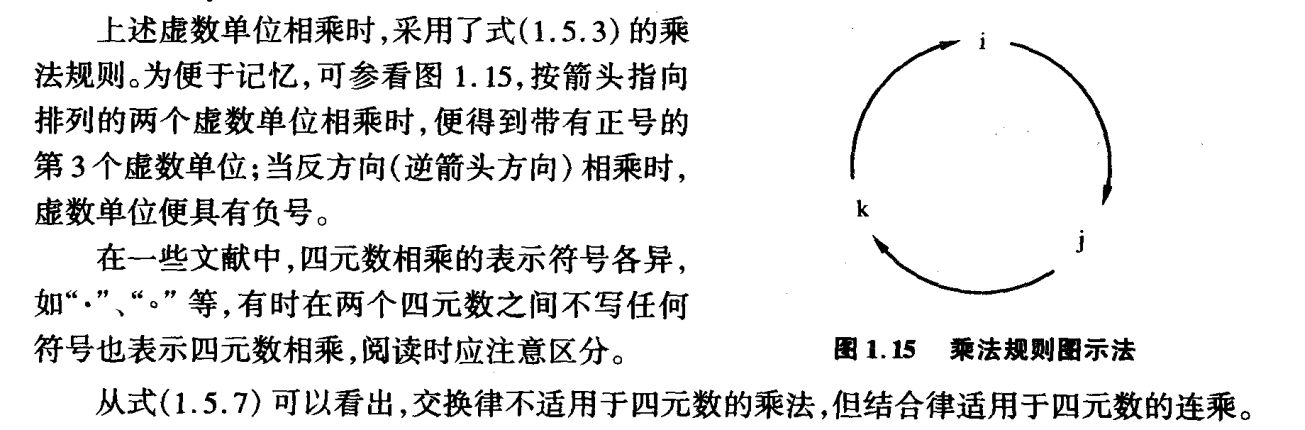


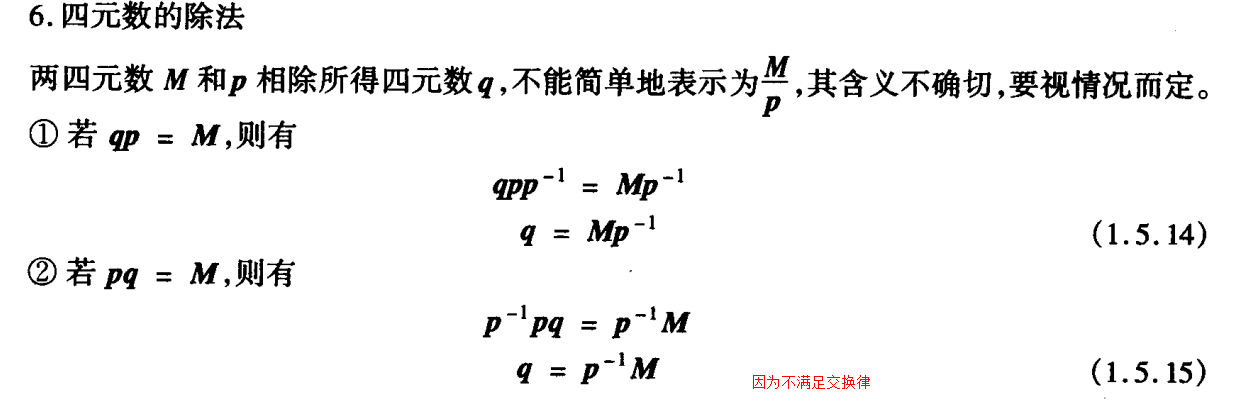
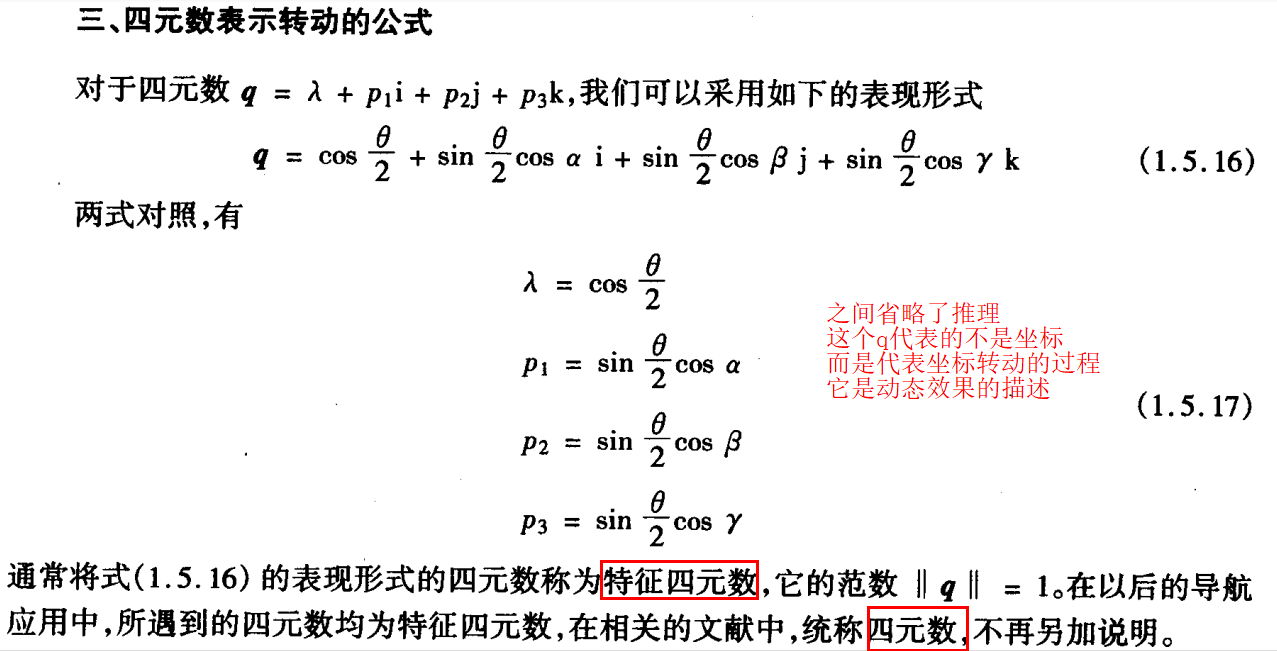
上面是一些运算法则的介绍.
下面是,应用原理.


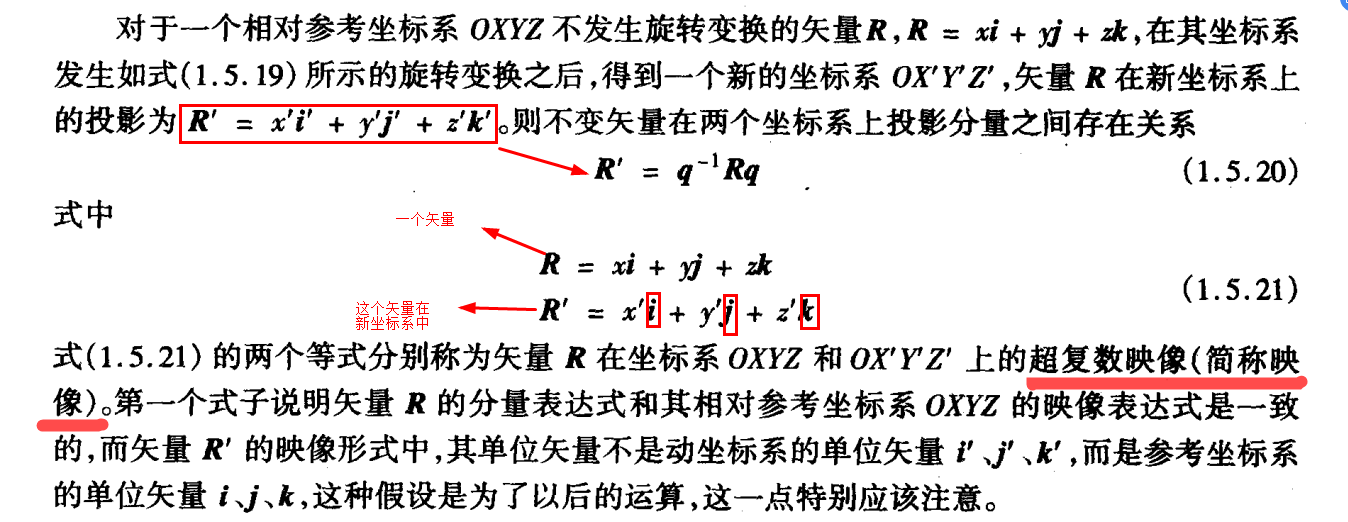
感觉上面的有点别扭,因为这里的两个R撇的表达式不一样,那么应该是参数不一样吧.

