初步认识:

实现步骤:
1、创建一个回调接口。
2、创建一个回调对象实现回调接口。
3、创建一个控制器对象,将回调对象作为参数传给控制器对象,控制器对象负责检查某个场景是否出现或某个条件是否满足,当满足时,则调用回调对象的某方法。
代码示例:
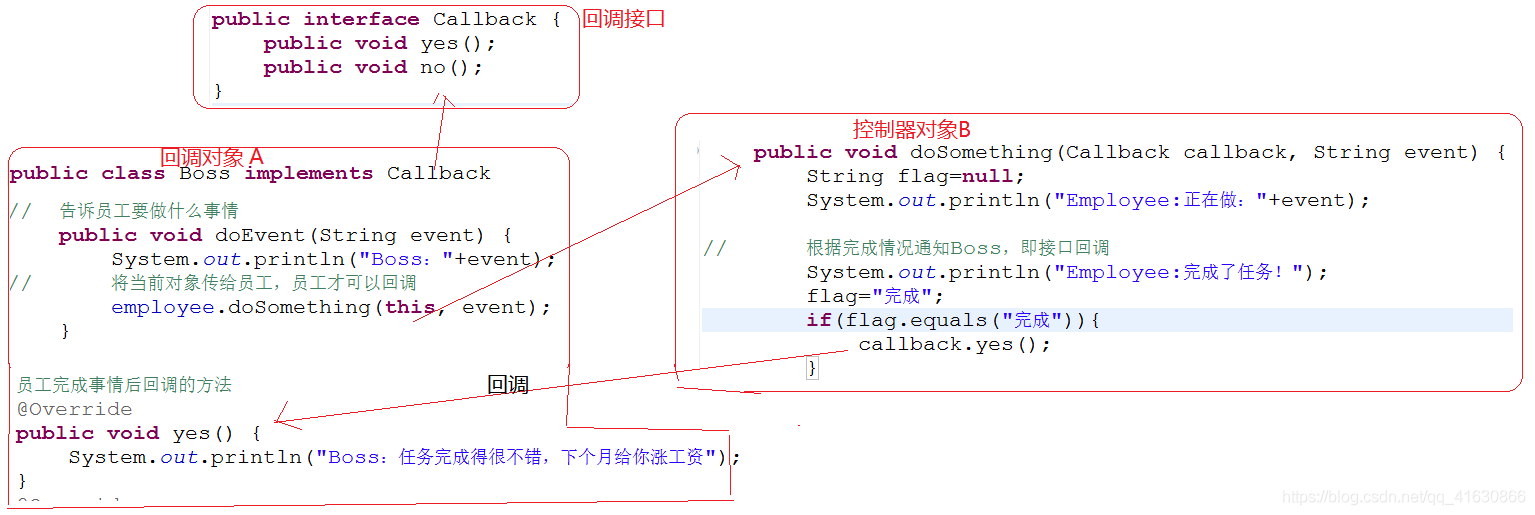
实例:Boss通知员工做事情,员工完成任务之后告诉Boss完成情况。
说明:Callback:回调接口。Boss:回调对象。Employee:控制器对象。
1、创建一个回调接口
public interface Callback { public void yes(); public void no(); }
2、创建一个回调对象实现回调接口
// Boss需要实现回调的接口 public class Boss implements Callback{ // 传入一个员工对象 private Employee employee; public Boss(Employee employee) { this.employee = employee; } // 告诉员工要做什么事情 public void doEvent(String event) { System.out.println("Boss:"+event); // 将当前对象传给员工,员工才可以回调 employee.doSomething(this, event); } // 员工完成事情后回调的方法 @Override public void yes() { System.out.println("Boss:任务完成得很不错,下个月给你涨工资"); } @Override public void no() { System.out.println("Boss:任务没完成,好好反思一下"); } }
3、创建一个控制器对象,将回调对象作为参数传给控制器对象,控制器对象负责检查某个场景是否出现或某个条件是否满足,当满足时,则调用回调对象的某方法
public class Employee { public Employee(){} // 完成boss交代的事情,回调接口作为参数穿过来 public void doSomething(Callback callback, String event) { String flag=null; System.out.println("Employee:正在做:"+event); // 根据完成情况通知Boss,即接口回调 System.out.println("Employee:完成了任务!"); flag="完成"; if(flag.equals("完成")){ callback.yes(); } System.out.println("Employee:未完成任务!"); flag="未完成"; if(flag.equals("未完成")){ callback.no(); } } }
4、测试:
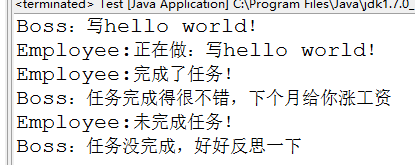
public class Test { public static void main(String[] args) { Employee employee=new Employee(); Boss boss = new Boss(employee); boss.doEvent("写hello world!"); } }
结果:
原文链接:https://blog.csdn.net/qq_41630866/article/details/88015833?utm_medium=distribute.pc_relevant.none-task-blog-OPENSEARCH-2.control&depth_1-utm_source=distribute.pc_relevant.none-task-blog-OPENSEARCH-2.control