3.6感知器算法
出发点
一旦判别函数的形式确定下来,不管它是线性的还是非线性的,剩下的问题就是如何确定它的系数。
在模式识别中,系数确定的一个主要方法就是通过对已知样本的训练和学习来得到。
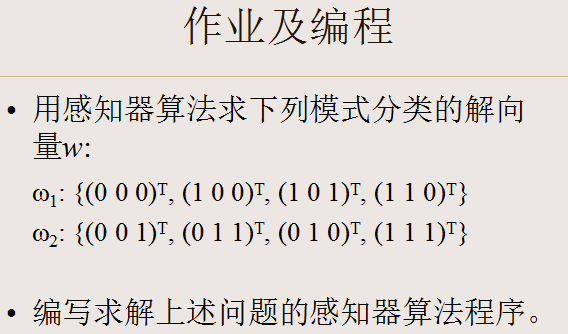
感知器算法就是通过训练样本模式的迭代和学习,产生线性(或广义线性)可分的模式判别函数。
基本思想
采用感知器算法(Perception Approach)能通过对训练模式样本集的“学习”得到判别函数的系数。
说明:这里采用的算法不需要对各类别中模式的统计性质做任何假设,因此称为确定性的方法。

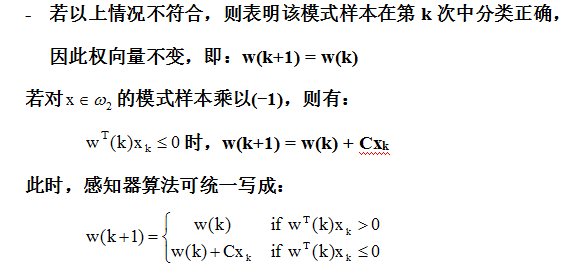
感知器算法实质上是一种赏罚过程 对正确分类的模式则“赏”,实际上是“不罚”,即权向量不变。
对错误分类的模式则“罚”,使w(k)加上一个正比于xk的分量。
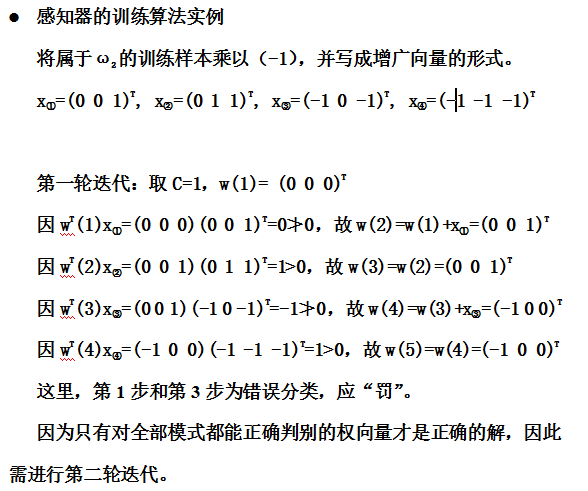
当用全部模式样本训练过一轮以后,只要有一个模式是判别错误的,则需要进行下一轮迭代,即用全部模式样本再训练一次。 如此不断反复直到全部模式样本进行训练都能得到正确的分类结果为止。



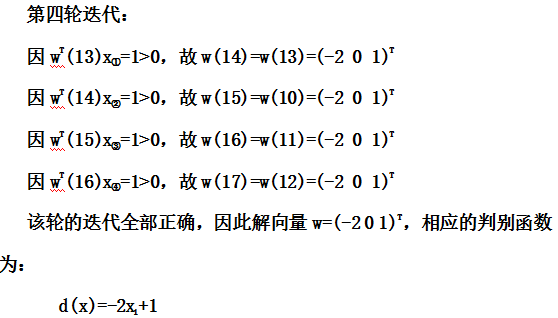
感知器算法的收敛性 只要模式类别是线性可分的,就可以在有限的迭代步数里求出权向量。
3.7采用感知器算法的多类模式的分类
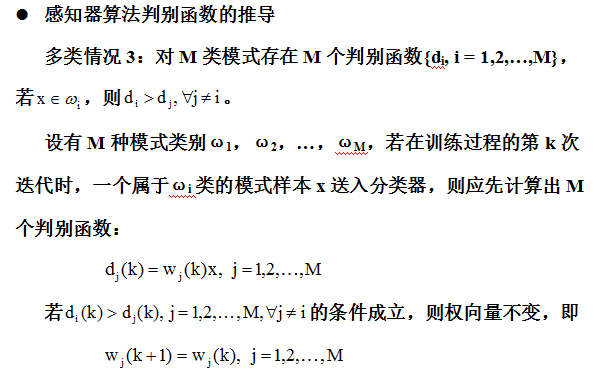

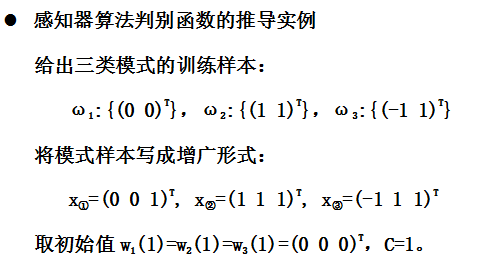
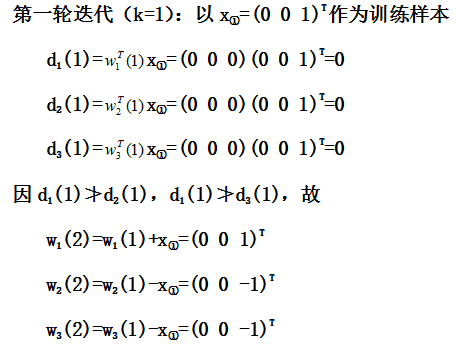
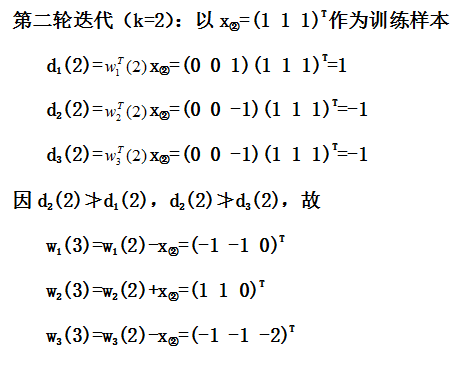
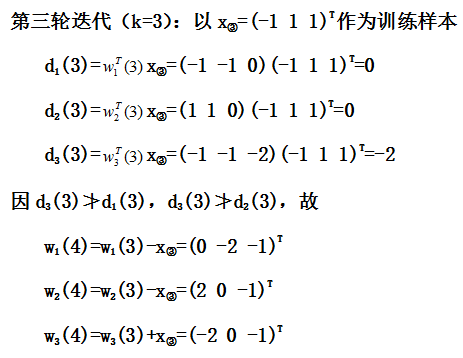
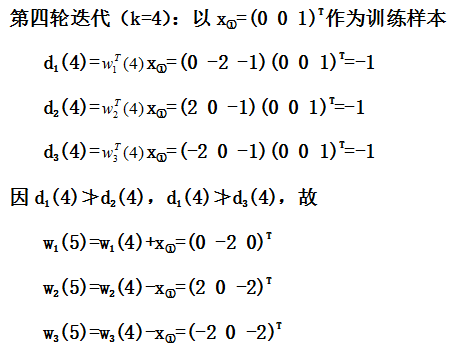
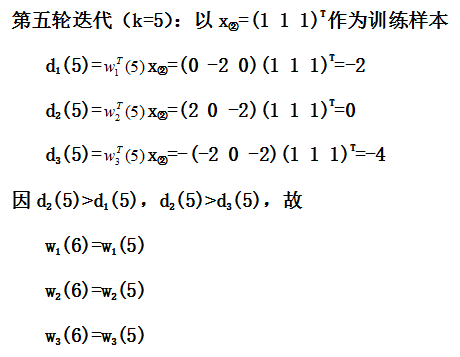
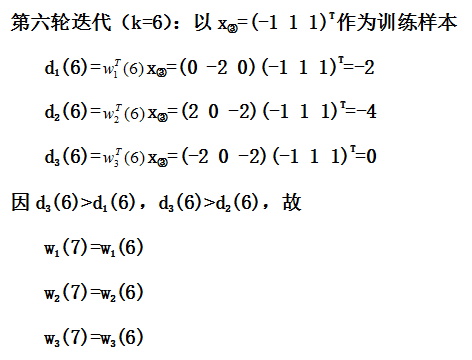
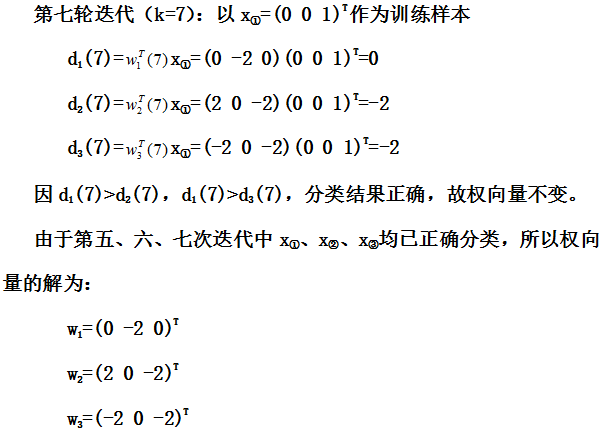
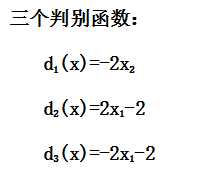
讨论
这里的分类算法都是通过模式样本来确定判别函数的系数,但一个分类器的判断性能最终要受并未用于训练的那些未知样本来检验。 要使一个分类器设计完善,必须采用有代表性的训练数据,它能够合理反映模式数据的整体。