涉及软件:
solidworks(3D绘图软件)(百度自行下载)
sw2urdf(urdf文件导出插件)下载地址:(Releases · ros/solidworks_urdf_exporter (github.com))
名词解释:
SW软件(solidworks)这里使用2020版本
基准轴:转轴(文中两个是一个意思)
到如下网站下载免费模型(测试使用)
5DOF 机械臂_Solidworks模型_3D模型下载_迪威模型 (3dwhere.com)
下载好之后得到如下压缩文件:

右键解压

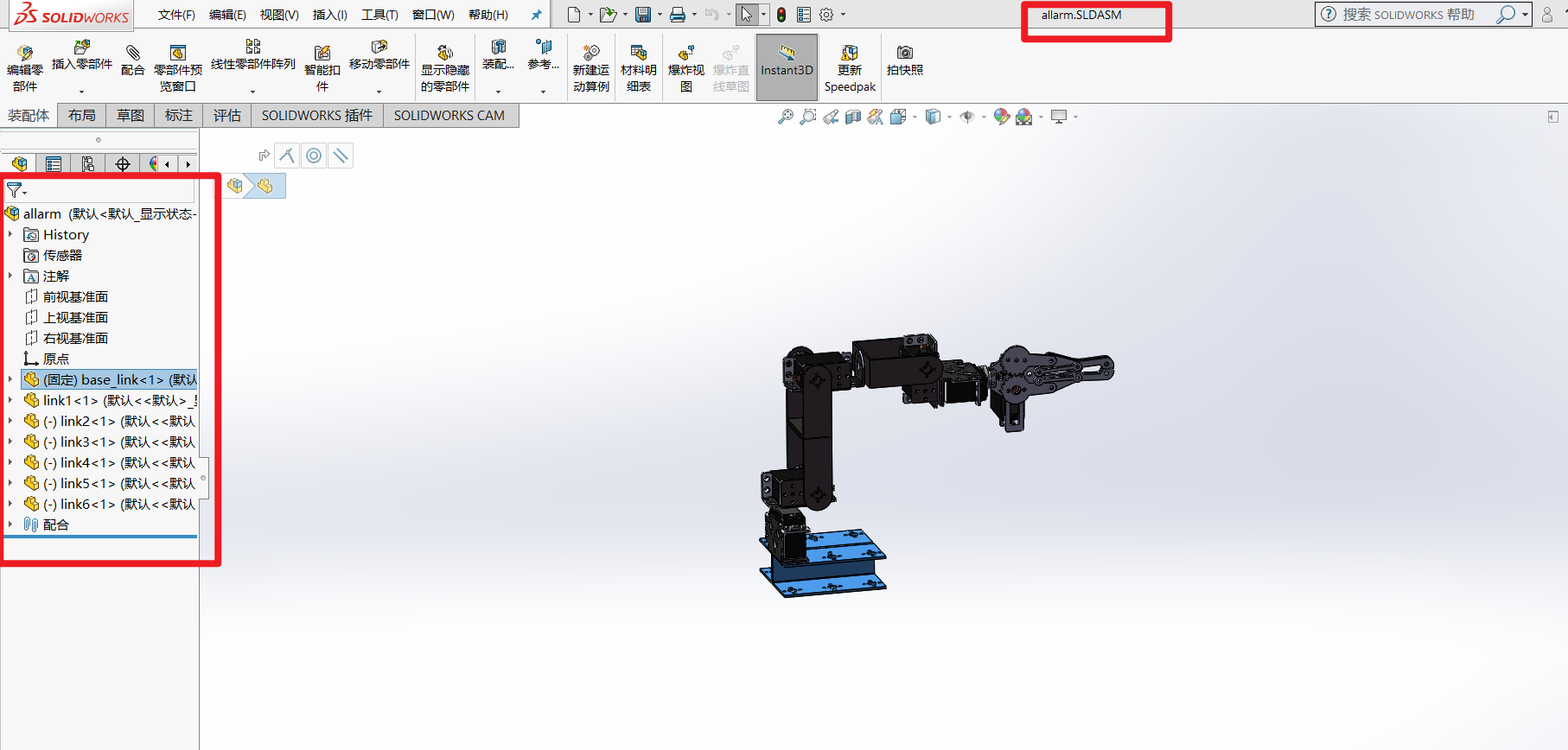
这里我使用solidworks 2020打开机械臂装配体

点击重建
可以看到零件很多,为了sw操作速度,我建议:合并相关零件为子装配体---->子装配体另存为零件--->重新新建装配体---->导入零件重新装配
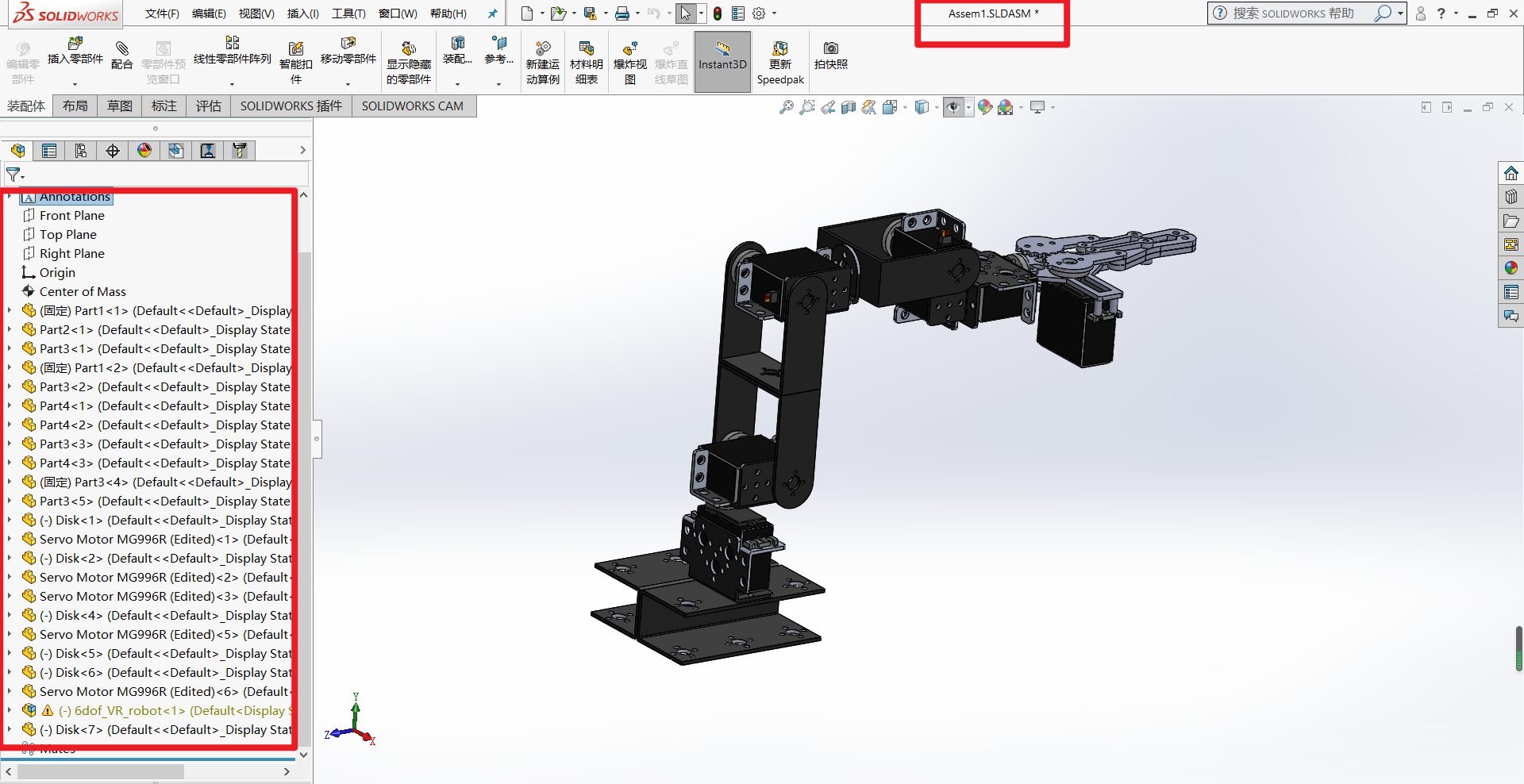
如上步骤操作后的工程如下图所示(简洁很多,sw运行起来也快了 ps:工作电脑没显卡):
接下来开始进入正题
给每个关节建立坐标系和转轴
1. base link 坐标添加(添加参考点--->基于点添加坐标系--->选择坐标系方向)
2. 添加转轴
为了便于后面导出urdf 选择转轴和 参考坐标系,我们需要修改下 转轴名和 坐标系名
按照如上方法逐个关节创建坐标系和旋转轴(转轴坐标系始终设定为 Z轴)
末端也需要建立坐标系
如上完成 全部关节坐标系和 转轴 添加之后 ,确保 sw2urdf 插件安装并启用成功,开始导出urdf配置
操作视频:
solidworks导出urdf文件操作流程_哔哩哔哩_bilibili
注意点:
ros1 中使用导出的文件夹,需要放到ros 工作空间中, catkin_make 之前需要手动创建一个src文件夹,catkin_make之后 source devel 目录下的setup.bash 后
运行 roscore 节点然后使用 roslaunch 运行生成的文件夹名 选择dispaly.launch 文件,就会出现rviz 环境,其中需要设定 fixedframe 为 base link
然后再手动在 添加机器人模型;
添加机器人模型;
该机器人关节名只能用小写。