1. 计算机网络
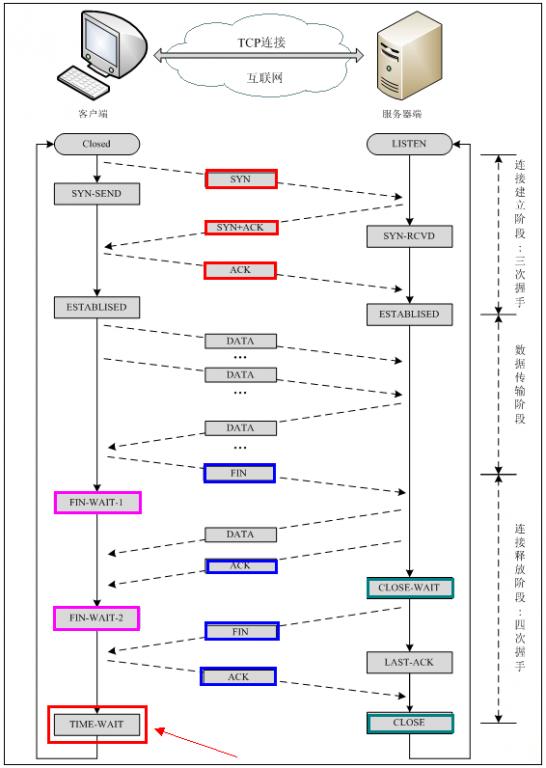
三次握手
第一次握手:主机A发送位码为syn=1,随机产生seq number=1234567的数据包到服务器,主机B由SYN=1知道,A要求建立联机;
第二次握手:主机B收到请求后要确认联机信息,向A发送ack number=(主机A的seq+1),syn=1,ack=1,随机产生seq=7654321的包;
第三次握手:主机A收到后检查ack number是否正确,即第一次发送的seq number+1,以及位码ack是否为1,若正确,主机A会再发送ack number=(主机B的seq+1),ack=1,主机B收到后确认seq值与ack=1则连接建立成功。
a.注意
SYN = synchronized(同步)
ACK = acknowledge(承认)
b.每次信号传输都伴有一个序列号(seq),用来唯一确定这次连接。
为什么是三次握手?不是2次,4次握手呢?
谢希仁版《计算机网络》中的例子是这样的,“已失效的连接请求报文段”的产生在这样一种情况下:client发出的第一个连接请求报文段并没有丢失,而是在某个网络结点长时间的滞留了,以致延误到连接释放以后的某个时间才到达server。本来这是一个早已失效的报文段。但server收到此失效的连接请求报文段后,就误认为是client再次发出的一个新的连接请求。于是就向client发出确认报文段,同意建立连接。假设不采用“三次握手”,那么只要server发出确认,新的连接就建立了。由于现在client并没有发出建立连接的请求,因此不会理睬server的确认,也不会向server发送数据。但server却以为新的运输连接已经建立,并一直等待client发来数据。这样,server的很多资源就白白浪费掉了。采用“三次握手”的办法可以防止上述现象发生。例如刚才那种情况,client不会向server的确认发出确认。server由于收不到确认,就知道client并没有要求建立连接。”
当客户端把所有数据传送完毕的时候,给服务端口送一个FIN报文,告知服务端:我这边没有数据可传,希望关闭客户端到服务端方向的连接。之后其状态由原来的
ESTABLISHED 变为FIN_WAIT_1,;
服务端收到客户的FIN报文后,送一个ACK报文给客户端,告知“我服务端知道你客户端口已经没有数据可传,但是我这边什么关闭连接,还需要等我的数据传完;如果我这里数据也传送完了,我也会给发送一个FIN报文。”。此时服务端发送ACK报文后,状态由之前的ESTABLISHED 变为CLOSE_WAIT
客户端端收到服务的ACK报文,将FIN_WAIT_1置FIN_WAIT_2,同时,继续等来的服务发送FIN报文。
当服务端数据传送也完毕的后,开始给客户端发送FIN包,发送FIN包后,其状态CLOSE_WAIT置为LAST_ACK
客户端口收到了服务的发过来的FIN包后,又给服务端发送ACK。发送ACK后,状态由原来的FIN_WAIT_2置为TIME_WAIT,客户在经过2MSL 时间进入CLOSE状态
服务端口收到客户端发送的ACK后,由LAST_ACK也进入CLOSE
客户端状态变迁:(主动端)
FIN_WAIT_1: 发送FIN给服务端口。
FIN_WAIT_2:收到服务端的ACK报文
TIME_WAIT :收到服务端发过来的FIN报文,发送ACK报文给服务端口。主动关闭连接端,接收到服务(TIME_WAIT是主动端关闭)之后进入2MSL时间的等待
CLOSE:2MSl过后,关闭进入初始化状态。
服务端状态变迁:(服务端)
CLOSE_WAIT:收到客户端FIN报文,给客户端发送ACK状态后,表示知道客户端要关闭连接请求,服务端可能数据还没有传送完,所以处于等
等待关闭状态。(CLOSE_WAIT是被动端关闭)
LAST_ACK:服务端数据传输完毕,发送FIN报文给客户端,同时等待客户端发ACK报文状态
CLOSE:收到客户端ACK报文后,进入初始化状态
连接是双方建立的。发送数据的端客户也转变为接受数据的服务端口,服务端和客户角色是相互转换的
TIME_WAIT状态存在的理由
1)可靠地实现TCP全双工连接的终止
因为虽然双方都同意关闭连接了,而且握手的4个报文也都发送完毕,按理可以直接回到CLOSED 状态(就好比从SYN_SENT 状态到ESTABLISH 状态那样),但是我们必须假想网络是不可靠的,你无法保证你(客户端)最后发送的ACK报文一定会被对方收到,就是说对方处于LAST_ACK 状态下的SOCKET可能会因为超时未收到ACK报文,而重发FIN报文,所以这个TIME_WAIT 状态的作用就是用来重发可能丢失的ACK报文。
2)允许老的重复分节在网络中消逝
TCP分节可能由于路由器异常而“迷途”,在迷途期间,TCP发送端可能因确认超时而重发这个分节,迷途的分节在路由器修复后也会被送到最终目的地,这个迟到的迷途分节到达时可能会引起问题。在关闭“前一个连接”之后,马上又重新建立起一个相同的IP和端口之间的“新连接”,“前一个连接”的迷途重复分组在“前一个连接”终止后到达,而被“新连接”收到了。为了避免这个情况,TCP协议不允许处于TIME_WAIT状态的连接启动一个新的可用连接,因为TIME_WAIT状态持续2MSL,就可以保证当成功建立一个新TCP连接的时候,来自旧连接重复分组已经在网络中消逝。
最后一张图:
2.操作系统
2.1 进程、线程是什么,区别是什么?
进程:
进程是具有一定独立功能的程序关于某个数据集合上的一次运行活动,进程是系统进行资源分配和调度的一个独立单位。(资源、独立)
举个例子,在linux系统中。
线程自己基本上不拥有系统资源,只拥有一点在运行中必不可少的资源(如程序计数器,一组寄存器和栈),但是它可与同属一个进程的其他的线程共享进程所拥有的全部资源。
(以上为第一点概念上的区别)
区别二:关系上的区别。
进程至少含一个线程(每个进程都有一个主线程),进程能创建、撤销线程。
线程能创建线程,但不能创建进程。
也就是说线程是进程的一部分。
区别三:资源上的区别。
进程在执行过程中拥有独立的内存单元,多个进程的资源不共享。而某个进程下的所有线程共享该进程所拥有的全部资源。
区别四:操作系统对其管理方式
进程崩溃不会影响其他进程。线程挂了其所属的进程也会挂。
进程有独立的地址空间,一个进程崩溃后,在保护模式下不会对其它进程产生影响,而线程只是一个进程中的不同执行路径。线程有自己的堆栈和局部变量,但线程之间没有单独的地址空间,一个线程死掉就等于整个进程死掉,所以多进程的程序要比多线程的程序健壮,但在进程切换时,耗费资源较大,效率要差一些。但对于一些要求同时进行并且又要共享某些变量的并发操作,只能用线程,不能用进程。
区别五:构建的代价
进程用户独立的资源,而线程只是含有少量运行中必不可少的资源。所以建一个进程的开销比线程大。