要求:对给出的左右视图进行匹配,最后输出左右两张disparity map(视差图)
e.g.
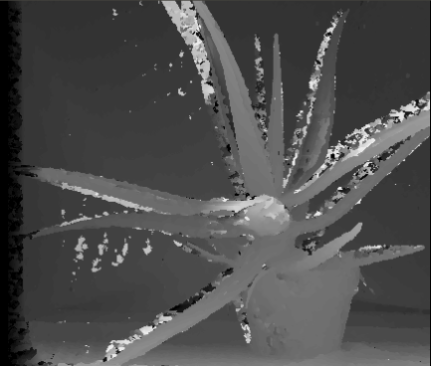
左视图、右视图(两幅图像大小相同,只有水平方向上的视角变换)


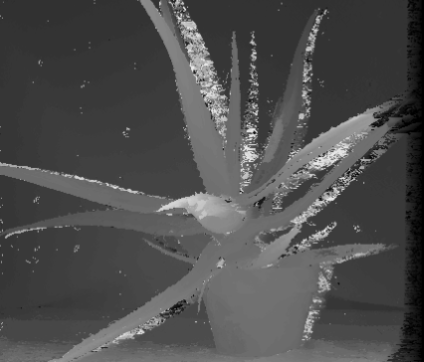
标准视差图如下:


SSD(sum of squared differences)实现:

1.把左右视图转成CV_8UC1单通道图像
可以直接引用opencv的API实现、自己写一个对三通道取平均值或者按照下面公式转换的函数,对结果影响不大

2.对每一个像素进行处理
假设dmax=79,则有,对于每个像素的每个d值,计算patch(滑动窗口)内左右视图的像素灰度值的平方差之和,然后记录该值与其对应的d值
此处可以用vector<pair<sum, d>>来存储结果
3. 取最小sum值对应的d做为最终输出的disparity map对应点的灰度值
result:5*5 窗口,坏点率分别为24,72%, 25.78%


NCC(normalized cross-correlation)实现:

1. 同样,先把左右视图转成单通道灰度图
2. 然后对于每个像素做处理,对于每个对应的d值,先计算分子,在计算分母,最后把分子/分母的值与对应d值存入vector中
3.取vector中最大值对应的d值为disparity map在该点的灰度值
result:5*5窗口 坏点率:23.64%, 24.20% 比SSD稍微好一点


ASW(Adaptive Support Weight)实现:



这个就按公式实现,比较简单,如果窗口足够大的话,ASW的处理效果会比较好,但是会很慢
但是中间计算Cpq值的时候主要要把BGR模型转换成Lab模型计算

result:5*5 窗口大小,坏点率:31.33% , 31.39%

33*33窗口大小,坏点率:19.44% , 20.75%(但是,跑了9242 seconds...可以自行感受一下...

代码实现:https://github.com/CheerM/opencv_stereo_matching/tree/master/src
BTW,哪位勇士跑完全部测例的ASW 33*33,能不能顺便分享一下数据给我看看,感激不尽啊> <
