3 i2c-dev
3.1 概述
之前在介绍I2C子系统时,提到过使用i2c-dev.c文件在应用程序中实现我们的I2C从设备驱动。不过,它实现的是一个虚拟,临时的i2c_client,随着设备文件的打开而产生,并随着设备文件的关闭而撤销。I2c-dev.c针对每个I2C适配器生成一个主设备号为89的设备文件,实现了i2c_driver的成员函数以及文件操作接口,所以i2c-dev.c的主题是”i2c_driver成员函数+字符设备驱动”。
3.2 i2c-dev.c源码分析
初始化模块
- static int __init i2c_dev_init(void)
- {
- res= register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops);
- i2c_dev_class= class_create(THIS_MODULE, "i2c-dev");
- /*Keep track of adapters which will be added or removed later */
- res= bus_register_notifier(&i2c_bus_type, &i2cdev_notifier);
- /*绑定已经存在的适配器 */
- i2c_for_each_dev(NULL,i2cdev_attach_adapter);
- }
I2c-dev初始化函数主要做了注册名为”i2c”的字符设备文件和”i2c-dev”的类
i2cdev_read和i2cdev_write
I2c-dev.c中实现的i2cdev_read和i2cdev_write函数不具有太强的通用性,只适合下面这种单开始信号情况:

而不适合多开始信号的情况:

所以我们经常会使用i2cdev_ioctl函数的I2C_RDWR,在分析i2cdev_ioctl函数之前,我们需要了解一个结构体:
- /* This is the structure as used in theI2C_RDWR ioctl call */
- struct i2c_rdwr_ioctl_data {
- structi2c_msg __user *msgs; /* pointersto i2c_msgs */
- __u32nmsgs; /* number ofi2c_msgs */
- };
Msgs 表示单个开始信号传递的数据;
Nmsgs 表示有多少个msgs,比如上图,单开始信号时,nmsgs等于1;多开始信号时,nmsgs等于2
- struct i2c_msg {
- __u16addr; /* slave address */
- __u16flags; /* 默认为写入 */
- #define I2C_M_TEN 0x0010 /*this is a ten bit chip address */
- #define I2C_M_RD 0x0001 /* read data,from slave to master */
- #define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_REV_DIR_ADDR 0x2000 /*if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_IGNORE_NAK 0x1000 /*if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */
- __u16len; /* msg length */
- __u8*buf; /* pointer to msgdata */
- };
3.3 eeprom实例
预备知识
使用的ok6410开发板,eeprom的地址为0x50,实验完成一个数据的读写,先看下读写时序
AT24C02任意地址字节写的时序:
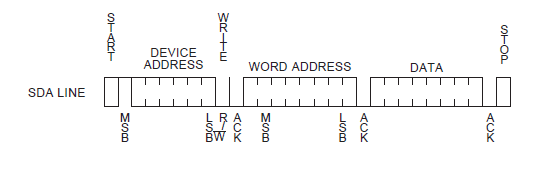
AT24C02任意地址字节写的时序:

用户态驱动:
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <stdlib.h>
//#include <linux/types.h>
#define I2C_RDWR 0x0707
struct i2c_msg {
unsigned short addr; /* slave address */
unsigned short flags;
unsigned short len; /* msg length */
unsigned char *buf; /* pointer to msg data */
};
struct i2c_rdwr_ioctl_data {
struct i2c_msg *msgs; /* pointers to i2c_msgs */
unsigned int nmsgs; /* number of i2c_msgs */
};
int main()
{
int fd;
struct i2c_rdwr_ioctl_data e2prom_data;
//1. 打开通用设备文件
fd = open("/dev/i2c-0", O_RDWR);
//为i2c_rdwr_ioctl_data中的struct i2c_msg *分配空间
e2prom_data.msgs = (struct i2c_msg *)malloc(2*sizeof(struct i2c_msg)); // 构造两条消息
//2. 构造写数据到eeprom
e2prom_data.nmsgs = 1; // 只有一条消息
(e2prom_data.msgs[0]).len = 2; //长度等于2,第一个字节代表的是i2c设备的内部地址,第二个字节代表的是写入的数据
(e2prom_data.msgs[0]).addr = 0x50; // 从设备地址(e2prom的地址),注意这里是不带方向的!
(e2prom_data.msgs[0]).flags = 0; // 方向由flag标志位来指明,0代表了写,1代表了读
(e2prom_data.msgs[0]).buf = (unsigned char*)malloc(2); // 这里只分配两个字节(内部偏移地址一字节,数据1字节)
(e2prom_data.msgs[0]).buf[0] = 0x10; // 数据将写入e2prom中的内部0x10地址中
(e2prom_data.msgs[0]).buf[1] = 0x60; // 写入e2prom中内 部0x10地址中的数据位0x60
//3. 使用ioctl写入数据
ioctl(fd, I2C_RDWR, (unsigned long)&e2prom_data, I2C_RDWR); // 这里面的命令参数对应的是驱动内部的ioctl中的case语句中的参数
//4. 构造从eeprom读数据的消息
e2prom_data.nmsgs = 2; // 读数据需要两条消息
(e2prom_data.msgs[0]).len = 1; //长度为一个字节,代表的是i2c设备的内部地址
(e2prom_data.msgs[0]).addr = 0x50; // 从设备地址(e2prom的地址),注意这里是不带方向的!
(e2prom_data.msgs[0]).flags = 0; // 方向由flag标志位来指明,0代表了写,1代表了读
(e2prom_data.msgs[0]).buf[0] = 0x10; // 数据将写入e2prom中的内部0x10地址中
// 第二条消息(读数据)
(e2prom_data.msgs[1]).len = 1; //长度为一个字节,代表的是i2c设备的内部地址
(e2prom_data.msgs[1]).addr = 0x50; // 从设备地址(e2prom的地址),注意这里是不带方向的!
(e2prom_data.msgs[1]).flags = 1; // 方向由flag标志位来指明,0代表了写,1代表了读
(e2prom_data.msgs[1]).buf = (unsigned char*)malloc(2);
(e2prom_data.msgs[1]).buf[0] = 0; // 数据从e2prom中的内部0x10地址中读出
//5. 使用ioctl读出数据
ioctl(fd, I2C_RDWR, (unsigned long)&e2prom_data);
printf("buf[0] = %x
", (e2prom_data.msgs[1]).buf[0]);
//6. 关闭设备
close(fd);
}