IMU预积分技术最早由T Lupton于12年提出[1],C Forster于15年[2][3][4]将其进一步拓展到李代数上,形成了一套优雅的理论体系。Forster将IMU预积分在开源因子图优化库GTSAM中进行了实现,并完成了和其另一大作SVO的组合。这套理论目前已经被广泛的应用在基于Bundle Adjustment优化框架的Visual Inertial Odometry中。其中包括VI-ORBSLAM,港科大VINS,浙大ICE-BA等。
本报告对Foster的paper[3][4]中的公式进行了详尽的推导,试图将这套优雅的理论详细地展现在读者面前,使读者对IMU预积分理论有更加完备的认识。
为了更好的理解本系列报告,推荐另外三本参考书幕[5][6][7]。
本系列报告中公式较为繁多,因此篇幅较长,将分为四篇进行推送。这是本系列的第一篇。公式中各种上下标较多,笔者已尽量做到没有错误,但难免仍有疏漏,如有任何疑问、建议或需进行探讨,请联系笔者,邮箱地址附于文末。
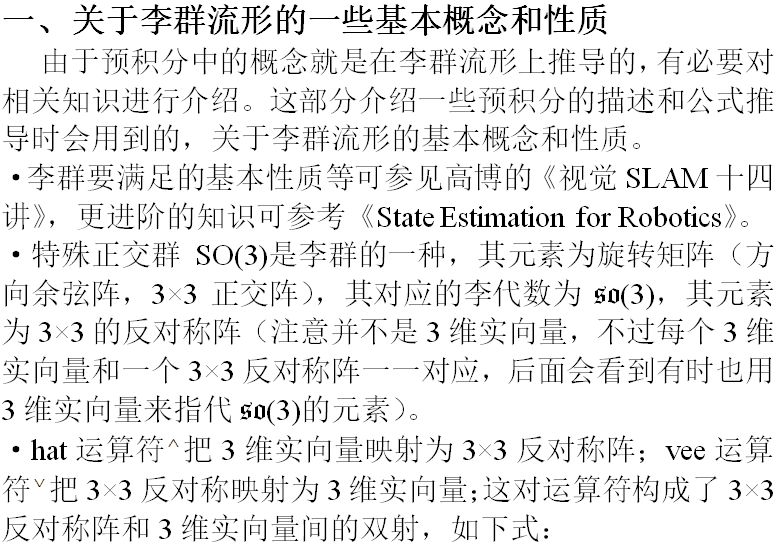
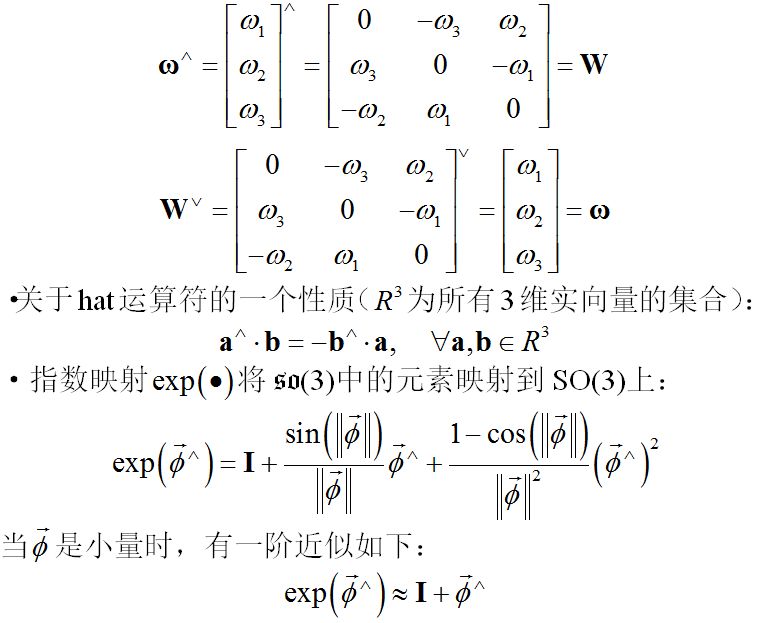
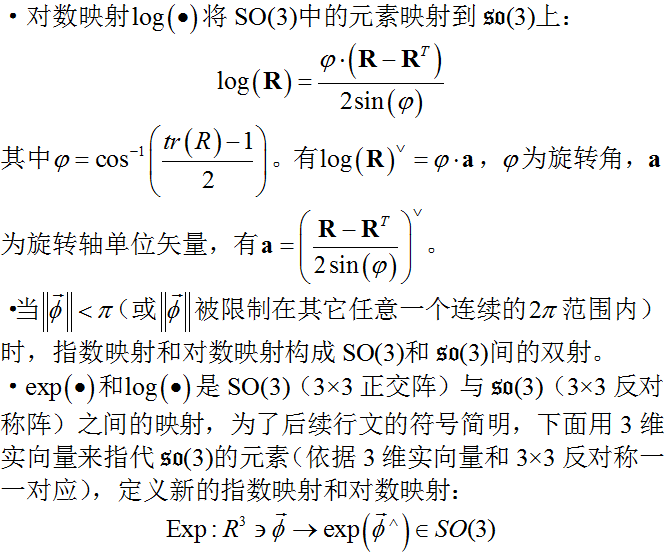

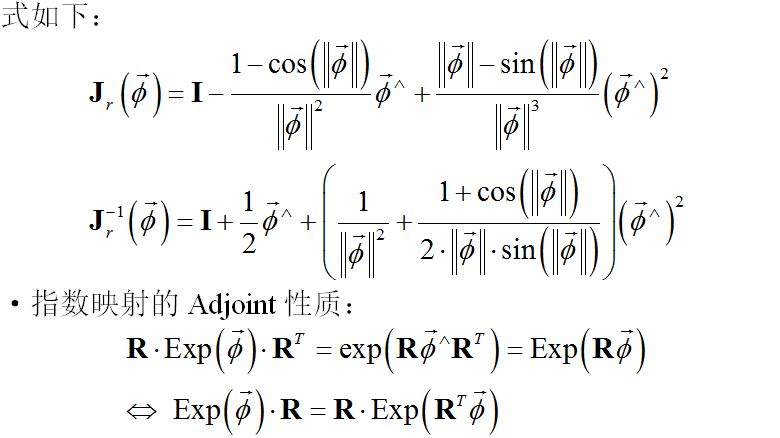


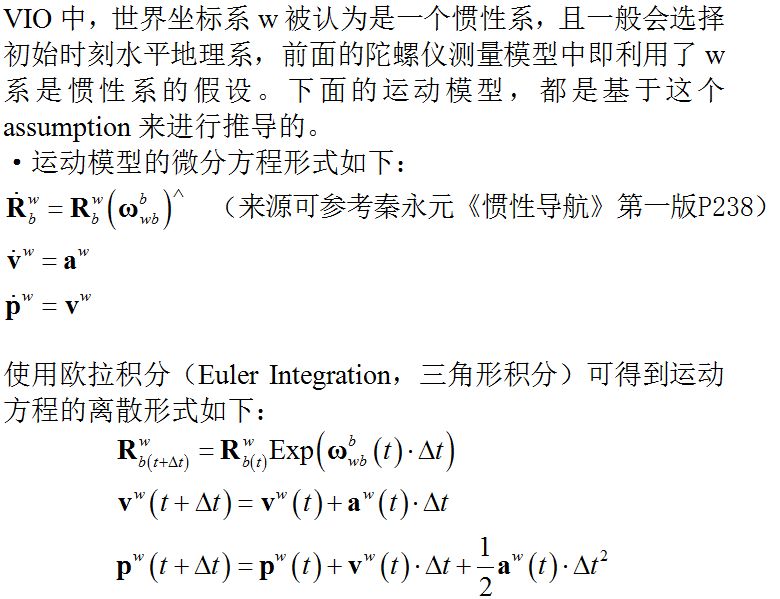
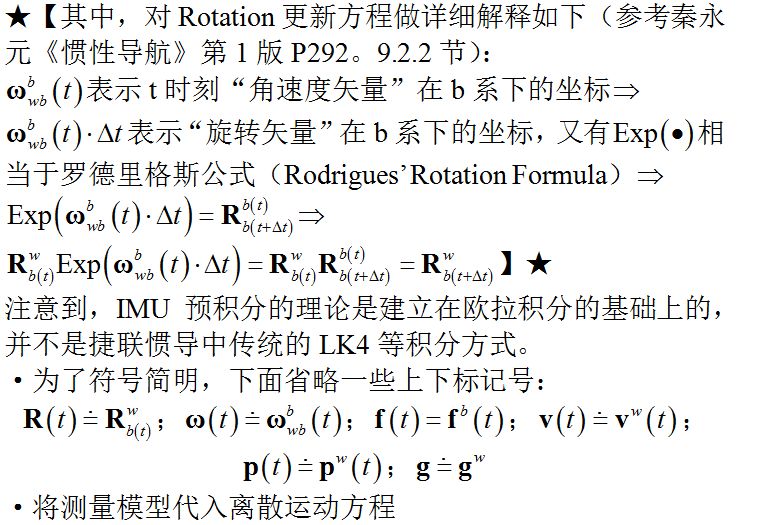
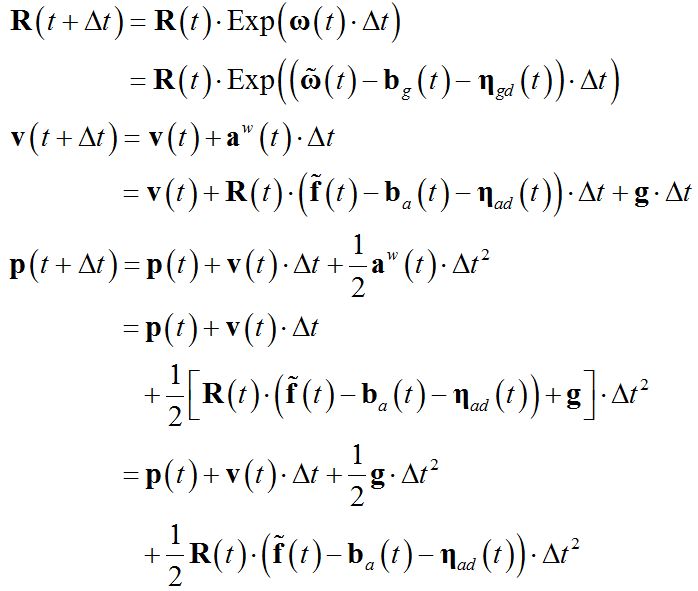
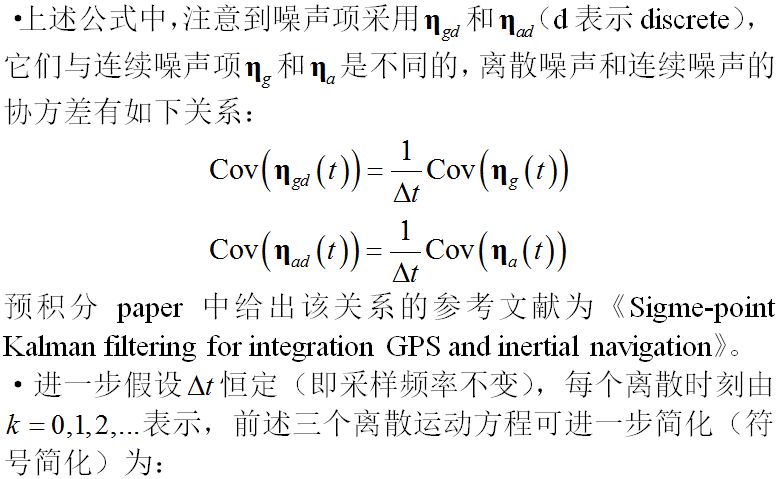
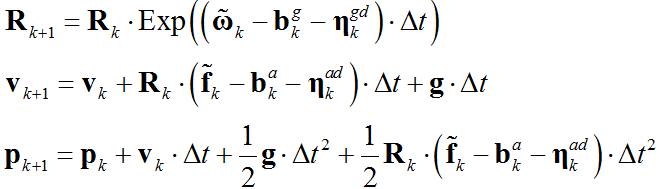
本期首先介绍了一些李代数知识,然后介绍了IMU预积分理论采用的IMU测量模型。这些知识将在后面的推导中被频繁的运用。