1、新建lib目录
2、MyLibrary目录下创建以下文件
1)__init__.py
#__init__.py
#!/usr/bin/python
# -*- coding: UTF-8 -*-
from mylib1 import mylib1
from mylib2 import mylib2
version = '1.0'
class lib(mylib1,mylib2):
ROBOT_LIBRARY_SCOPE = 'GLOBAL'
注意:
version = '1.0' //版本定义
ROBOT_LIBRARY_SCOPE = 'GLOBAL' //这一句代表库是全局的
2)mylib1.py
# -*- coding: utf-8 -*- # coding: unicoed_escape import os class mylib1: def file_check_isexist1(self, filepath): """校验文件应存在 :param filepath:文件路径 :return: None """ if not os.path.exists(filepath): raise AssertionError("Error! '%s' is not exist!" % filepath) if __name__ == '__main__': obj = mylib1()
3)mylib2.py
# -*- coding: utf-8 -*- # coding: unicoed_escape import os class mylib2: def file_check_isexist2(self, filepath): """校验文件应存在 :param filepath:文件路径 :return: None """ if not os.path.exists(filepath): raise AssertionError("Error! '%s' is not exist!" % filepath) if __name__ == '__main__': obj = mylib2()
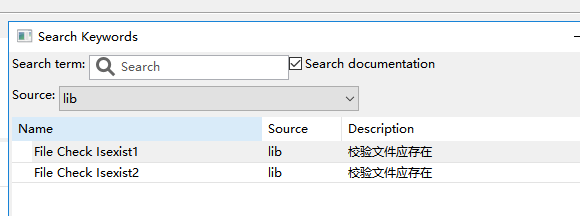
3、RF导入库的时候路径选择lib所在位置,导入成功(黑色)
4、RF中输入F5选择lib库查看生效的方法: