一、轮询方式获取按键
1.原理分析:
- 按键会影响电平的输入,通过GPIO的输入电平来检测按键的变化
- 按下0,前面实验“GPIO读”用到过
- 应用中是read

2.硬件准备
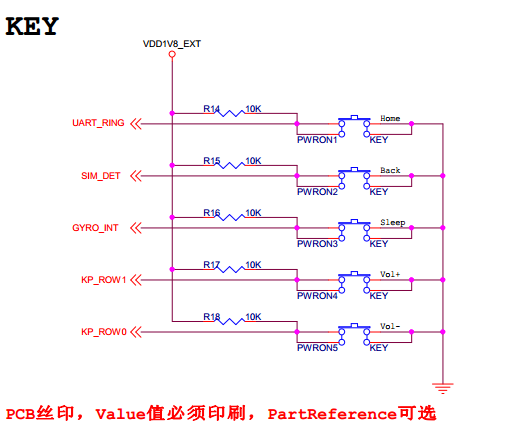
- 使用两个按键:Home和Back
- UART_RING和SIM_DET→
- GPX1_1和GPX1_2→
- EXYNOS4_GPX1(1),EXYNOS4_GPX1(2)
3.软件准备
- Device Drivers --->
- Input device support --->
- Keyboards ---> GPIO Buttons
- 平台文件中注册设备pollkey
- 在leds结构体后面添加:
struct platform_device s3c_device_pollkey_ctl = { .name = "pollkey", .id = -1, }; &s3c_device_pollkey_ctl,
- 重新编译烧写
4.驱动和应用
- 驱动在led基础上修改
- 设置keyIO→对应为输入模式
- 添加驱动中的read函数
- 应用在gpio读的基础上修改
- 按键按下的时候,应该是0。检测按键就是判断buffer有没有0
使用查询的方式,占用CPU达到50%,效率非常低
后面介绍中断的方式来获取按键值
read_button.c:


#include <linux/init.h> #include <linux/module.h> /*驱动注册的头文件,包含驱动的结构体和注册和卸载的函数*/ #include <linux/platform_device.h> /*注册杂项设备头文件*/ #include <linux/miscdevice.h> /*注册设备节点的文件结构体*/ #include <linux/fs.h> /*Linux中申请GPIO的头文件*/ #include <linux/gpio.h> /*三星平台的GPIO配置函数头文件*/ /*三星平台EXYNOS系列平台,GPIO配置参数宏定义头文件*/ #include <plat/gpio-cfg.h> #include <mach/gpio.h> /*三星平台4412平台,GPIO宏定义头文件*/ #include <mach/gpio-exynos4.h> #include <linux/string.h> /* copy to user */ #include <asm/uaccess.h> #define DRIVER_NAME "pollkey" #define DEVICE_NAME "pollkey" static int key_gpios[] = { EXYNOS4_GPX1(1), EXYNOS4_GPX1(2), }; static int poll_key_release(struct inode *inode, struct file *file) { printk(KERN_EMERG "poll_key release "); return 0; } static int poll_key_open(struct inode *inode, struct file *file) { printk(KERN_EMERG "poll_key open "); return 0; } //read static ssize_t poll_key_read(struct file *filp, char __user *buff, size_t size, loff_t *ppos) { unsigned char key_value[2]; if(size != sizeof(key_value)) { return -1; } key_value[0] = gpio_get_value(key_gpios[0]); key_value[1] = gpio_get_value(key_gpios[1]); copy_to_user(buff, key_value, sizeof(key_value)); return 0; } static struct file_operations poll_key_ops = { .owner = THIS_MODULE, .open = poll_key_open, .release = poll_key_release, .read = poll_key_read, }; static struct miscdevice poll_key_dev = { .minor = MISC_DYNAMIC_MINOR, .name = DEVICE_NAME, .fops = &poll_key_ops, }; static int poll_key_probe(struct platform_device *pdv) { int ret, i; printk(KERN_EMERG " initialized "); for(i=0;i<2;i++) { char *gpio_name = "Button"; char string[5]; snprintf(string, 5, "%d", i); strcat(gpio_name, string); ret = gpio_request(key_gpios[i], gpio_name); if(ret < 0) { printk(KERN_EMERG "gpio_request EXYNOS4_GPX1(%d) failed! ",i+1); return ret; } else { s3c_gpio_cfgpin(key_gpios[i], S3C_GPIO_INPUT); s3c_gpio_setpull(key_gpios[i], S3C_GPIO_PULL_NONE); } } misc_register(&poll_key_dev); return 0; } static int poll_key_remove(struct platform_device *pdv) { printk(KERN_EMERG " remove "); gpio_free(key_gpios[0]); gpio_free(key_gpios[1]); misc_deregister(&poll_key_dev); return 0; } static void poll_key_shutdown(struct platform_device *pdv) { ; } static int poll_key_suspend(struct platform_device *pdv,pm_message_t pmt) { return 0; } static int poll_key_resume(struct platform_device *pdv) { return 0; } struct platform_driver poll_key_driver = { .probe = poll_key_probe, .remove = poll_key_remove, .shutdown = poll_key_shutdown, .suspend = poll_key_suspend, .resume = poll_key_resume, .driver = { .name = DRIVER_NAME, .owner = THIS_MODULE, } }; static int __init poll_key_init(void) { int DriverState; printk(KERN_EMERG "poll_key enter! "); DriverState = platform_driver_register(&poll_key_driver); printk(KERN_EMERG " DriverState is %d ",DriverState); return 0; } static void __exit poll_key_exit(void) { printk(KERN_EMERG "poll_key exit! "); platform_driver_unregister(&poll_key_driver); } module_init(poll_key_init); module_exit(poll_key_exit); MODULE_LICENSE("Dual BSD/GPL"); MODULE_AUTHOR("TOPEET");
app:
#include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> #include <sys/ioctl.h> #include <string.h> int main(void) { int fd; unsigned char buffer[2]; char *read_key = "/dev/pollkey"; if((fd = open(read_key, O_RDWR|O_NDELAY)) < 0) { printf("APP open %s failed ", read_key); return -1; } printf("APP open %s success! ", read_key); while(1) { if(read(fd, buffer, sizeof(buffer)) < 0) { printf("read %s failed", read_key); } if(!buffer[0] || !buffer[1]) { printf("key home is %d, key back is %d ", buffer[0], buffer[1]); } } close(fd); }
二、中断方式获取按键
- 按键按下(产生了中断)→跳转到异常向量入口,执行中断函数
- 中断函数要做什么
- 保护现场
- 执行中断处理函数
- 恢复现场
- 我们需要做什么?
- 学会使用中断注册函数,了解注册中断相关的函数和结构体
注册中断函数:request_irq的5个参数
request_irq(unsigned irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev) 参数1:irq,中断号。(和平台架构相关,结合datasheet以及平台文件) 参数2:中断处理函数 参数3:中断标记。上升/下降沿,高/低电平。。。 参数4:中断名字 cat /proc/interrupts 参数5:使用和设备的设备结构体或者NULL。 free_irq free_irq(irq, *dev_id)
requset_irq的调用
4412上外部中断号如何对应:(IRQ_EINT(x)和datasheet对应)
- HOME和BACK
- EXYNOS4_GPX1[1]和EXYNOS4_GPX1[2]
-
- →KP_COL[1]和KP_COL[2]
- →XEINT_9和XEINT_10
- IRQ_EINT(9)和IRQ_EINT(10)
准备工作:
在平台文件中注册设备:keyirq 添加: struct platform_device s3c_device_keyirq_ctl = { .name = "keyirq", .id = -1, }; &s3c_device_keyirq_ctl, 重新编译烧写内核
驱动代码:
#include <linux/init.h> #include <linux/module.h> /*驱动注册的头文件,包含驱动的结构体和注册和卸载的函数*/ #include <linux/platform_device.h> /*注册杂项设备头文件*/ #include <linux/miscdevice.h> /*注册设备节点的文件结构体*/ #include <linux/fs.h> /*Linux中申请GPIO的头文件*/ #include <linux/gpio.h> /*三星平台的GPIO配置函数头文件*/ /*三星平台EXYNOS系列平台,GPIO配置参数宏定义头文件*/ #include <plat/gpio-cfg.h> #include <mach/gpio.h> /*三星平台4412平台,GPIO宏定义头文件*/ #include <mach/gpio-exynos4.h> #include <linux/string.h> /* copy to user */ #include <asm/uaccess.h> /* irq */ #include <linux/irq.h> #include <linux/interrupt.h> #define DRIVER_NAME "keyirq" #define DEVICE_NAME "keyirq" static int key_gpios[] = { EXYNOS4_GPX1(1), EXYNOS4_GPX1(2), }; static irqreturn_t eint9_interrupt(int irq, void *dev_id) { printk("receive a interrupt 9!"); return IRQ_HANDLED; } static irqreturn_t eint10_interrupt(int irq, void *dev_id) { printk("receive a interrupt 10!"); return IRQ_HANDLED; } static int key_irq_probe(struct platform_device *pdv) { printk(KERN_EMERG " initialized "); //注册中断 request_irq(IRQ_EINT(9), eint9_interrupt, IRQ_TYPE_EDGE_FALLING, "my_eint9", pdv); request_irq(IRQ_EINT(10), eint10_interrupt, IRQ_TYPE_EDGE_FALLING, "my_eint10", pdv); return 0; } static int key_irq_remove(struct platform_device *pdv) { printk(KERN_EMERG " remove "); free_irq(IRQ_EINT(9), pdv); free_irq(IRQ_EINT(10), pdv); return 0; } static void key_irq_shutdown(struct platform_device *pdv) { ; } static int key_irq_suspend(struct platform_device *pdv,pm_message_t pmt) { return 0; } static int key_irq_resume(struct platform_device *pdv) { return 0; } struct platform_driver key_irq_driver = { .probe = key_irq_probe, .remove = key_irq_remove, .shutdown = key_irq_shutdown, .suspend = key_irq_suspend, .resume = key_irq_resume, .driver = { .name = DRIVER_NAME, .owner = THIS_MODULE, } }; static int __init key_irq_init(void) { printk(KERN_EMERG "key_irq enter! "); platform_driver_register(&key_irq_driver); return 0; } static void __exit key_irq_exit(void) { printk(KERN_EMERG "key_irq exit! "); platform_driver_unregister(&key_irq_driver); } module_init(key_irq_init); module_exit(key_irq_exit); MODULE_LICENSE("Dual BSD/GPL"); MODULE_AUTHOR("TOPEET");
测试结果:
[root@iTOP-4412]# insmod key_irq.ko [ 38.013956] key_irq enter! [ 38.015271] initialized [root@iTOP-4412]# [ 48.024770] receive a interrupt 10! [root@iTOP-4412]# receive a interrupt 10!receive a interrupt 9!receive a interrupt 9!receive a interrupt 9!receive a interrupt 10!receive a interrupt 9!receive a interrupt 10!receive a interrupt 9!receive a interrupt 9!receive a interrupt 9!receive a interrupt 9!receive a interrupt 9!receive a interrupt 9!receive a interrupt 9!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10! [ 64.641192] failed to copy MFC F/W during init [ 65.540973] receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10!receive a interrupt 10! [root@iTOP-4412]# [root@iTOP-4412]# lsmod key_irq 1521 0 - Live 0xbf000000 [root@iTOP-4412]# rmmod key_irq
cat查看proc下的interrupts中断注册
361: 11 0 0 exynos-eint my_eint9 362: 25 0 0 exynos-eint my_eint10