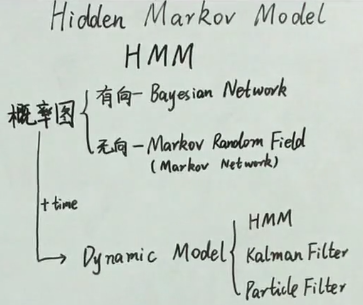
动态模型:
离散:HMM(转移概率必须是离散的,发射概率不一定是离散的)
连续:
线性:kalman Filter
非线性:Particle Filter
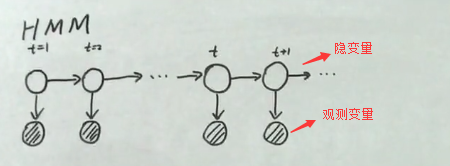
HMM的两个假设:
①齐次马尔可夫假设
当前的隐变量只与前一个隐变量有关
②观测独立假设
观察变量只与它的隐变量有关
三个问题:
1.evaluation
2.learning
3.decoding
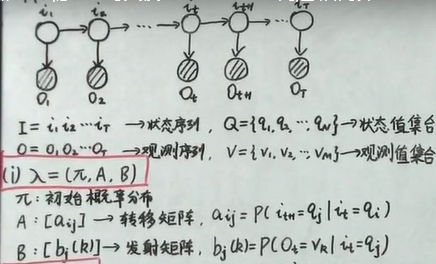
evaluation:
已知(初始概率分布Π,转移矩阵A,发射矩阵B) => 入
求P(O|入)
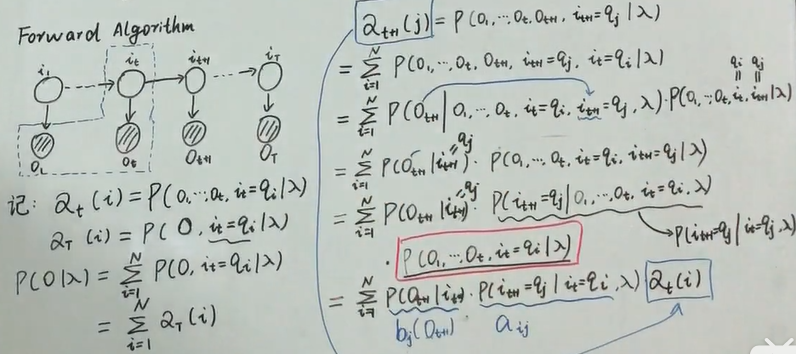
前向算法:
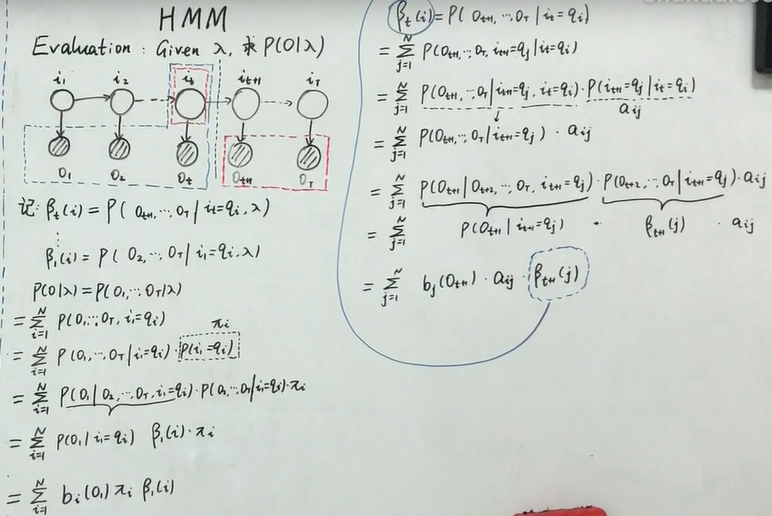
向后算法:
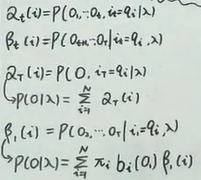
总结:
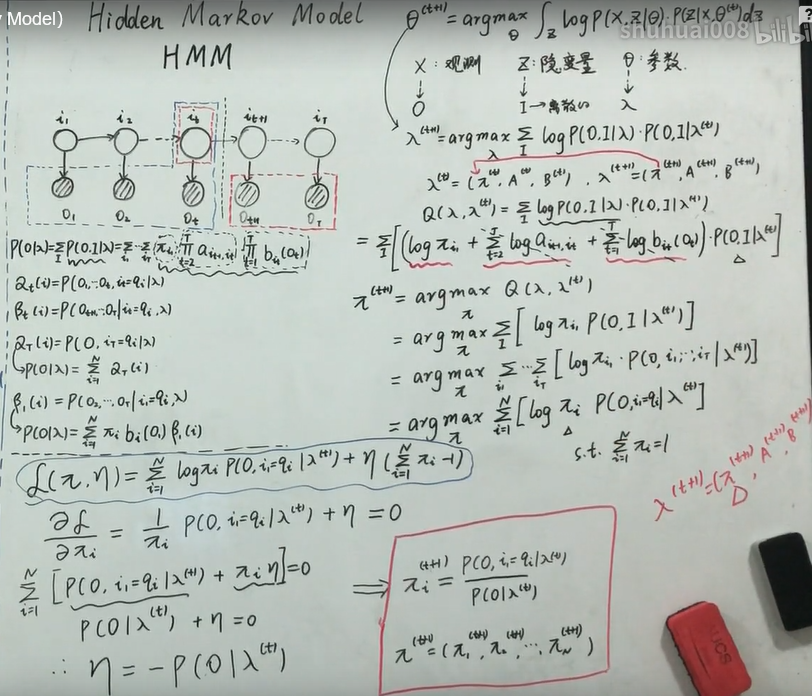
learning:
Πi:
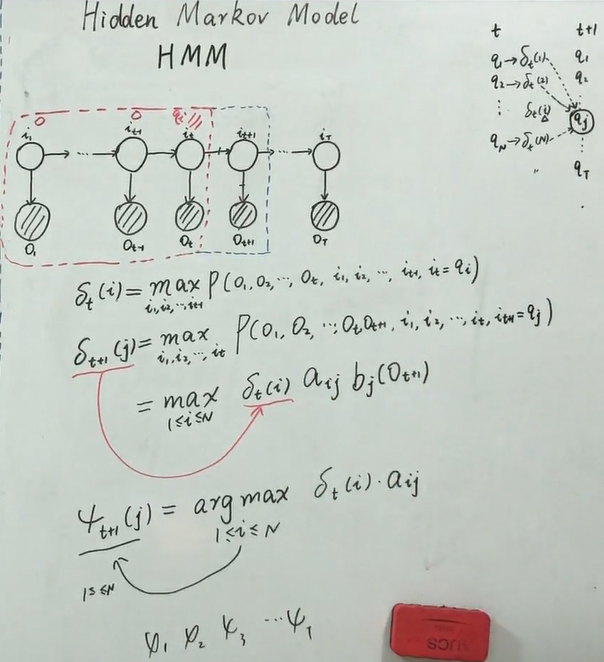
Decoding(/预测):