1.卡尔曼滤波如何预测多步之后的数据?
2.卡尔曼滤波哪里体现了预测功能?
答:在预测方程中的(F_{k})(不包括系统控制变量以及噪音的转移方程)、(B_{k})(体现外部控制量的控制矩阵)和(U_{k})(控制向量)就是对为未来一个步长的预测。
3.、(B_{k})和(U_{k})是怎么得到的?
答:是根据我们已知给予物体的加速度,利用运动学公式计算出来的数据。
4.如何修正预测数据?
答:通过测量值来修正我们的预测数据,用卡尔曼增益调节二者的权值,并不断迭代更新,使得数据不断在真实值附近波动。
5.如何获得预测噪声方差与观测噪声协方差?
答:预测噪声协方差 (Q) 与具体实验环境有关,大小取决于对预测过程的信任程度,用来描述不确定度。本实验中,所有预测噪声均可以体现在加速度的改变上,所以对加速度计算方差,作为实验参数。本实验中Q取0.018
观测噪声协方差 (R) 大小也取决于对观察过程的信任程度。比如,假设观测结果中的坐标x值常常很准确,那么矩阵R的第一个值应该比较小。为了实验简单,通常实验取均值为0方差为1的高斯白噪声.本实验P取0.542
一般在此类连续运动中,存在目标运动建模问题,例如:CV(运动速度恒定)模型、CA(等加速)模型。均可以采用此模型中的Q及R值。
6.预测步长是多少?
答:通常人们使车辆停止需要1.5秒的反应时间,因此在该系统中算法将设置3秒作为未来车辆轨迹的预测时间。选择3秒作为未来车辆的预测时间基于人们的双倍反反应平均时间考虑。
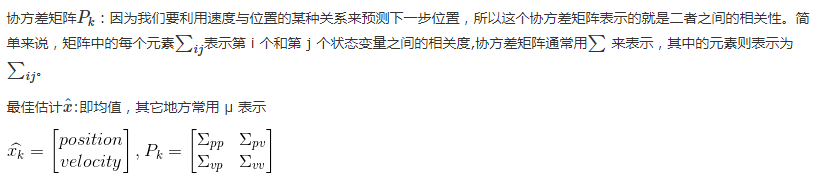
7.如何设置协方差矩阵 (P)
8.如何产生高斯白噪声
答:使用c语言自带的产生随机数函数,产生n多个随机数,然后将这很多个随机数加起来,当作一个样本,然后产生很多个这样的样本,这些数据的和或者均值就会趋近于高斯分布,最后可以使用归一化处理方式将数据映射至某个特定的数据区间,这种方法实现起来比较简单。
答案来源:产生均匀分布序列进而产生高斯白噪声
C语言利用中心极限定理产生高斯白噪声
9.什么是中心极限定理?

10.预测状态下的碰撞时间和非预测状态下的碰撞时间怎么计算?
答:先算出3秒后车辆所在位置,进行早期碰撞检测,若车辆预测位置与对方距离符合以下条件,则认为已经碰撞。
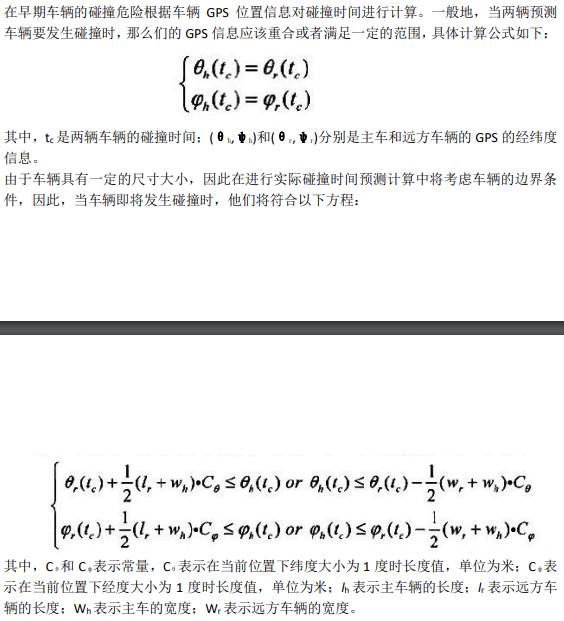
否则二者都要计算相对位置和相对速度(通过方向角进行投影得到)
预测状态下,我们预测了3秒后的碰撞时间。
非预测状态下,我们计算了当前距离下的碰撞时间。
若 (TTC_{预测}) > (TTC_{非预测}) 则没有碰撞风险,相反则有风险,须警报。
11.主要应用的是哪几种运动模型?
答:A车采用CV(运动速度恒定)模型、CA(等加速)模型。B车静止不动。
12.需要用到的数据有哪些?
答:位置(用于预测方程与更新方程),加速度(用于外部控制矩阵),速度(用于不包括控制变量的状态转移矩阵)