参考视频:https://www.bilibili.com/video/BV1Ci4y1L7ZZ?p=17&spm_id_from=pageDriver
参考文档:http://www.autolabor.com.cn/book/ROSTutorials/
任务:编写 ROS 程序,在控制台输出文本: Hello World,分别使用 C++ 和 Python 实现。
ROS中的程序即便使用不同的编程语言,实现流程也大致类似,以当前HelloWorld程序为例,实现流程大致如下:
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。
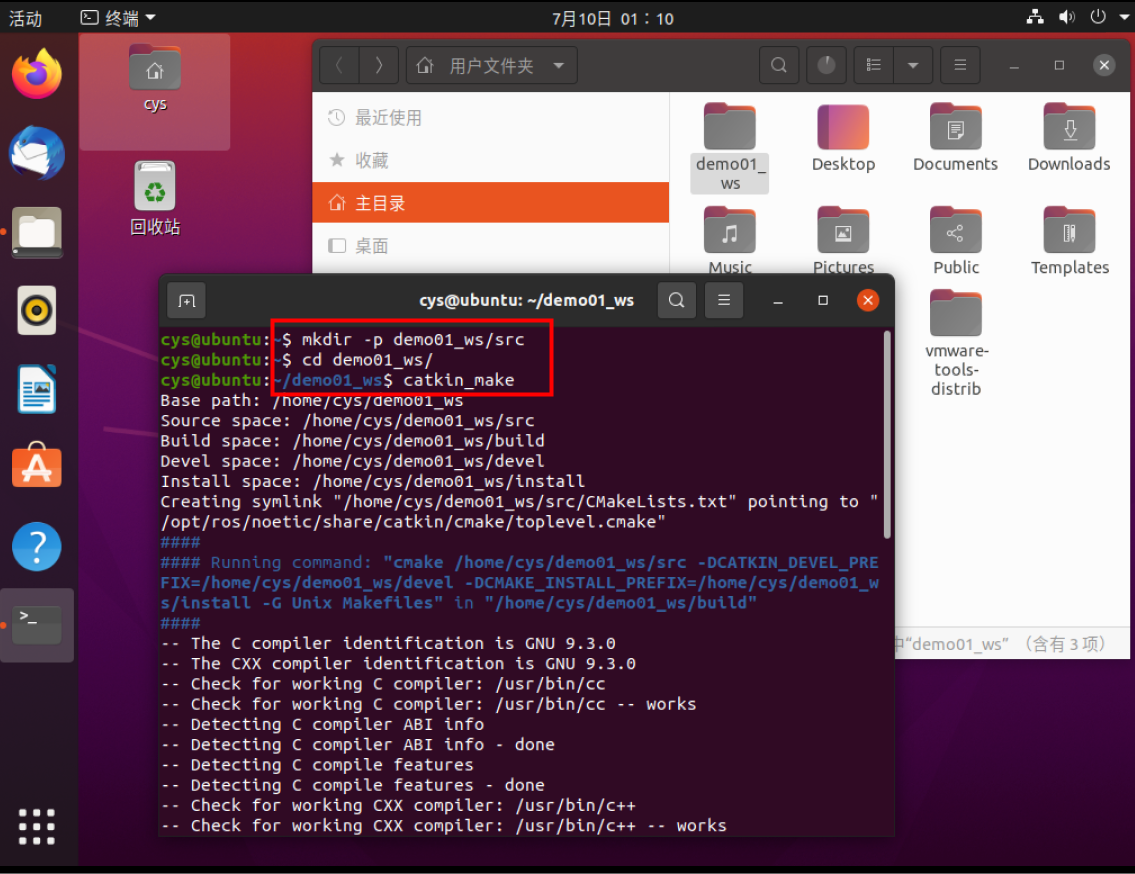
1.创建工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
上述命令,首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。
2.进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
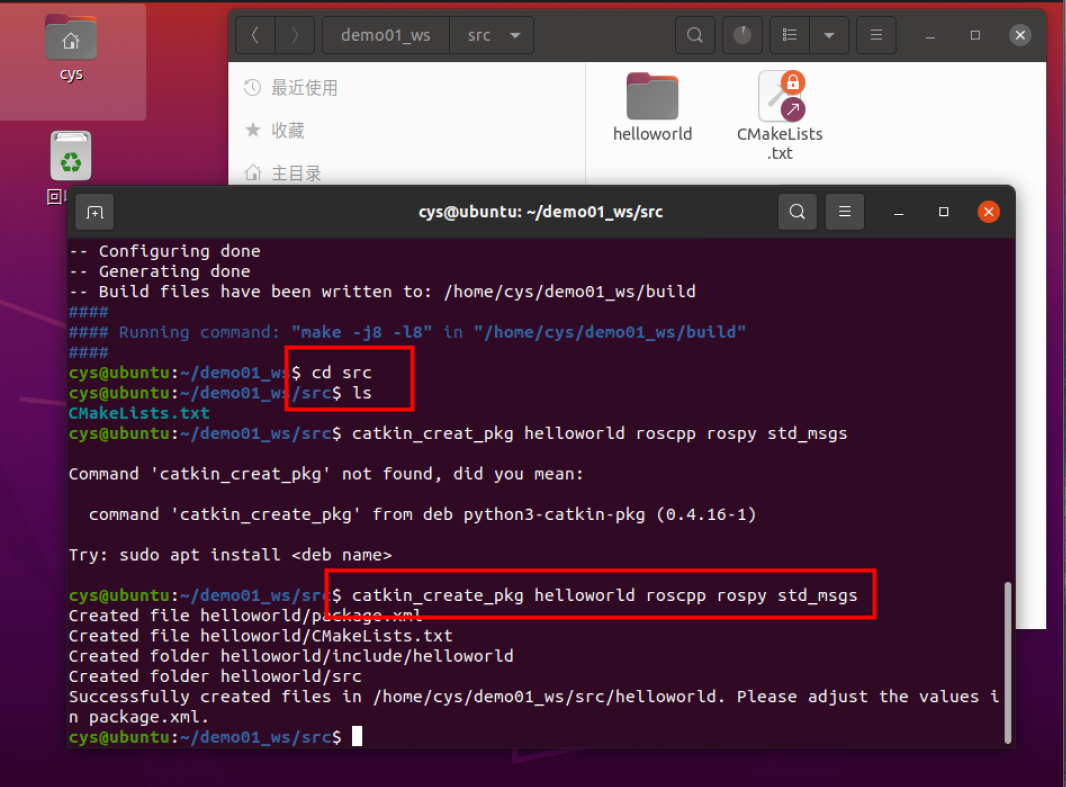
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
3.HelloWorld(C++版)
进入 ros 包的 src 目录编辑源文件
cd 自定义的包
C++源码实现(文件名自定义)
//1.包含ros的头文件 #include "ros/ros.h" //2.编写main函数 int main(int argc, char *argv[]){ //3.初始化ros节点 ros::init(argc,argv,"hello_node"); //4.输出日志 ROS_INFO("hello world!"); return 0; }

4.编辑 ros 包下的 Cmakelist.txt文件
add_executable(步骤3的源文件名 src/步骤3的源文件名.cpp ) target_link_libraries(步骤3的源文件名 ${catkin_LIBRARIES} )

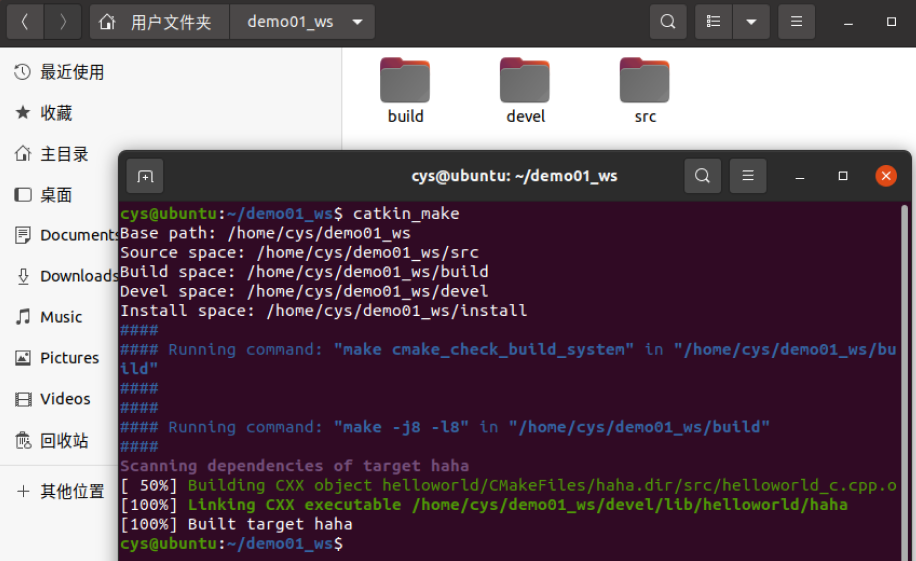
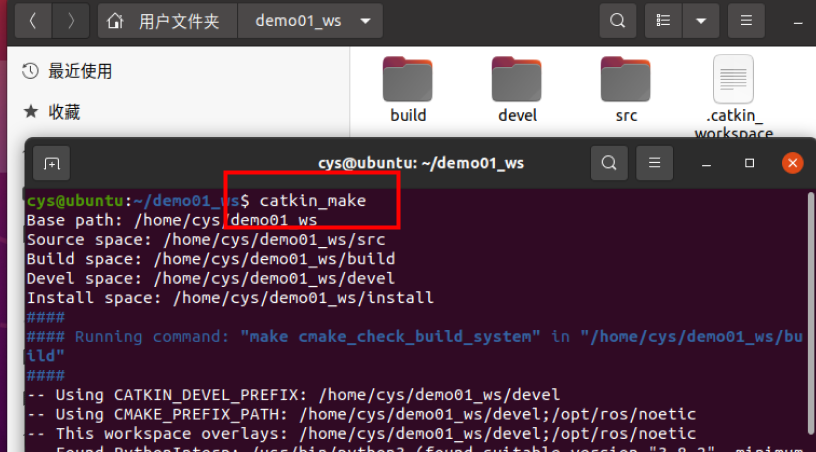
进入工作空间目录并编译
cd 自定义空间名称
catkin_make
生成 build devel ....
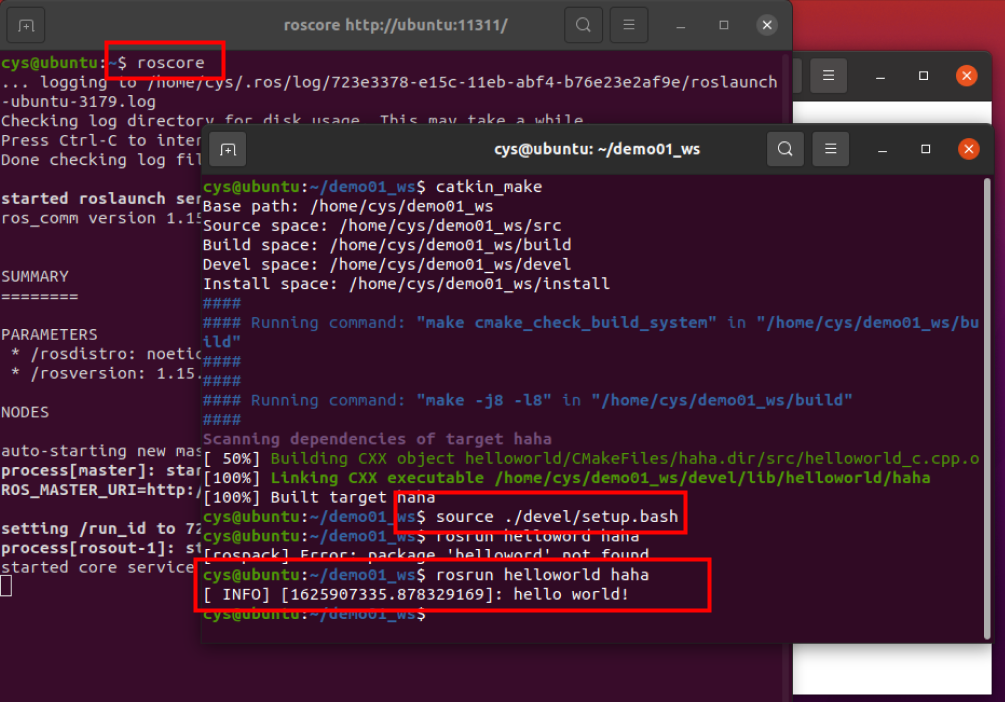
5.执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间 source ./devel/setup.bash rosrun 包名 C++节点
命令行输出: HelloWorld!
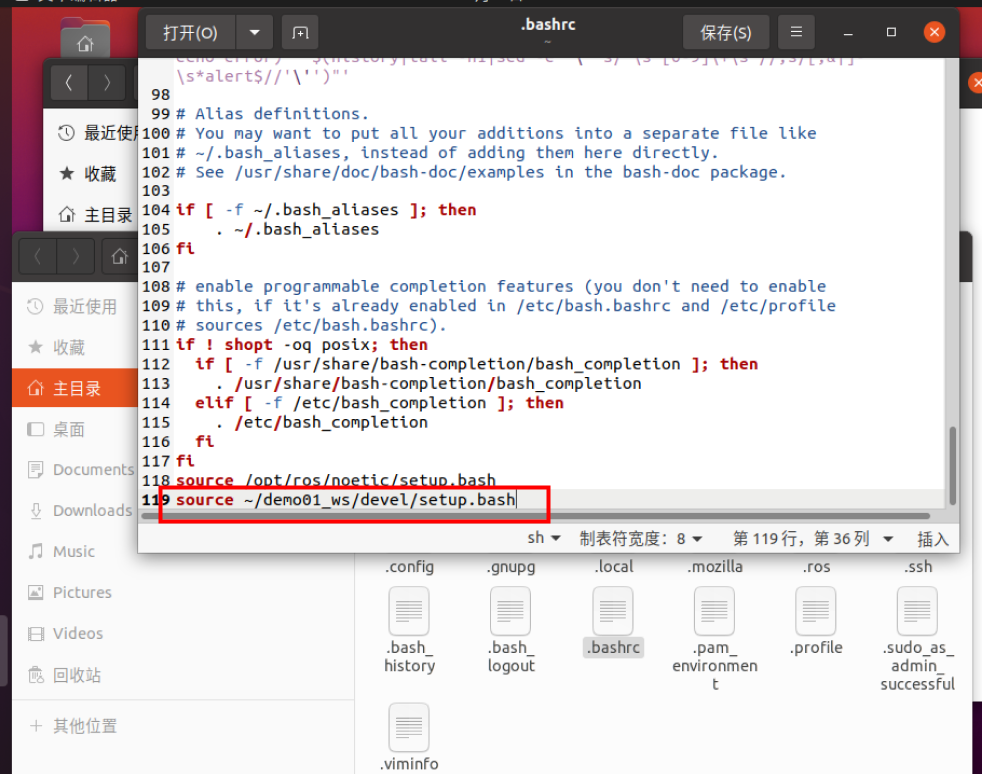
PS:source ~/工作空间/devel/setup.bash可以添加进.bashrc文件,使用上更方便
添加方式1: 直接使用 gedit 或 vi 编辑 .bashrc 文件,最后添加该内容
在home目录下 ctrl+h调出隐藏文件。bashrc
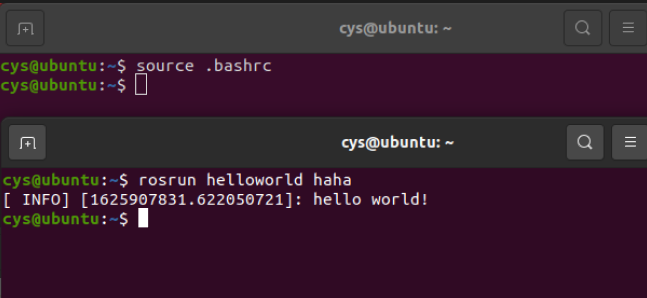
运行.bashrc以后,在任意一个终端运行,就都能运行了
添加方式2:
echo "source ~/工作空间/devel/setup.bash" >> ~/.bashrc
3.HelloWorld(python版)
进入 ros 包添加 scripts 目录并编辑 python 文件
cd ros包
mkdir scripts
新建 python 文件: (文件名自定义)
#! /usr/bin/env python ##指定解释器 #1.导包 import rospy #2.编写主入口 if __name__=="__main__": #3. 初始化ROS节点 rospy.init_node("hello_p"); #4.输出日志 rospy.loginfo("hello world!!!");

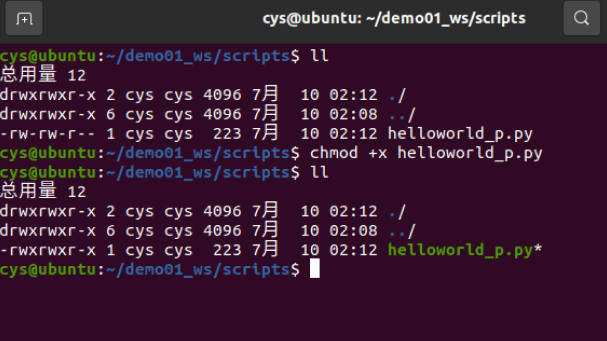
为 python 文件添加可执行权限
chmod +x 自定义文件名.py
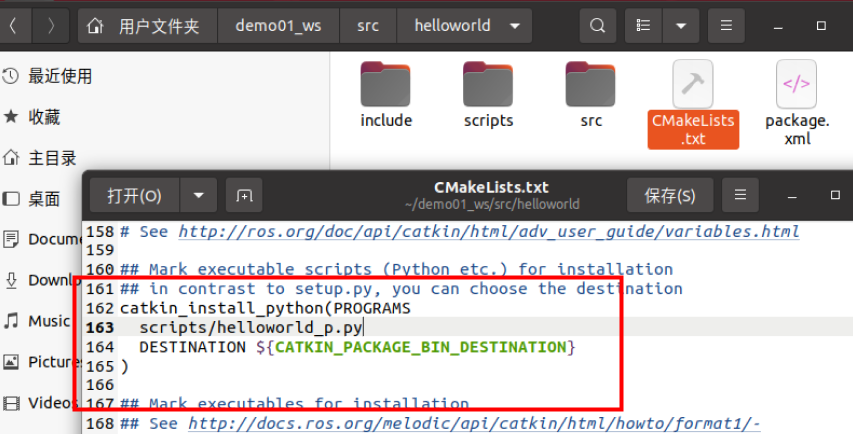
4.编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.py DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} )
进入工作空间目录并编译
cd 自定义空间名称
catkin_make
5.进入工作空间目录并执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间 source ./devel/setup.bash rosrun 包名 自定义文件名.py
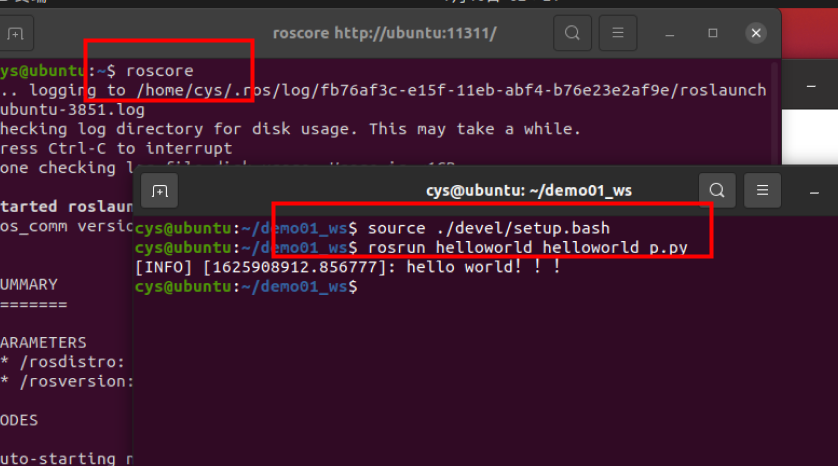
输出结果:Hello World!!!!