IIC 的总线协议和时序
IIC 标准速率为 100kbit/s,快速模式 400kbit/s,支持多机通讯, 支持多主控模块,但同一时刻只允许有一个主控。 由数据线 SDA 和时钟 SCL 构成串行总线;每个电路和模块都有唯一的地址。
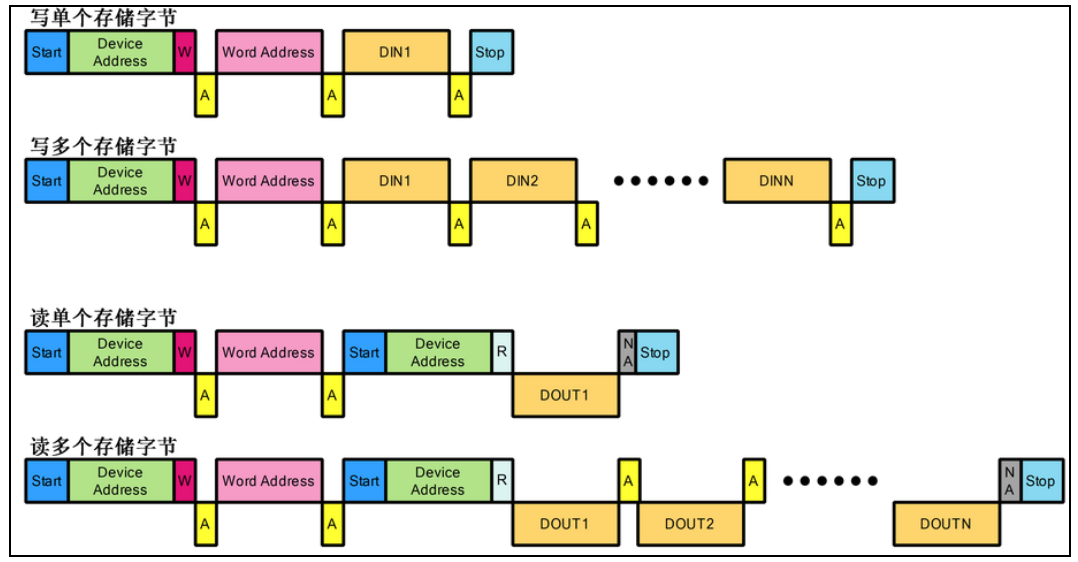
在这里以 AT24C04 为例说明 I2C 读写的基本操作和时序,I2C 设备的操作可分为写单个存储字节,写多个存储字节,读单个存储字节和读多个存储字节。 各个操作如下图所示。
下面对 I2C 总线通信过程中出现的几种信号状态和时序进行分析。
①总线空闲状态
I2C 总线总线的 SDA 和 SCL 两条信号线同时处于高电平时,规定为总线的空闲状态。此时各个器件的输出级场效应管均处在截止状态,即释放总线,由两条信号线各自的上拉电阻把电平拉高。
②启动信号(Start)
在时钟线 SCL 保持高电平期间,数据线 SDA 上的电平被拉低(即负跳变),定义为 I2C 总线
总线的启动信号,它标志着一次数据传输的开始。启动信号是由主控器主动建立的,在建立该信号之前 I2C 总线必须处于空闲状态,如下图所示。
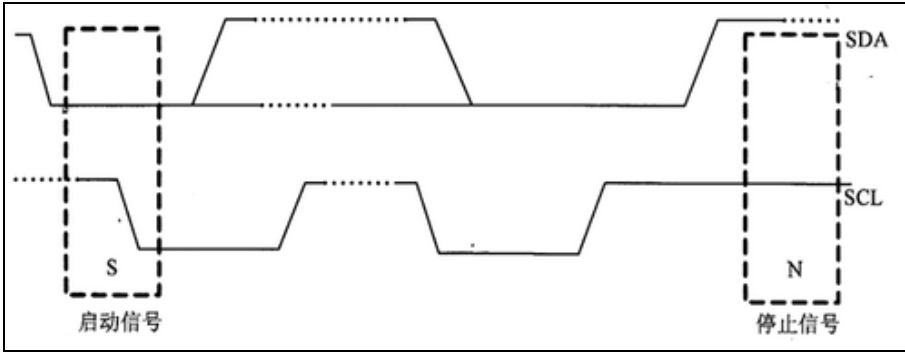
③停止信号(Stop)
在时钟线 SCL 保持高电平期间,数据线 SDA 被释放,使得 SDA 返回高电平(即正跳变),称为 I2C 总线的停止信号,它标志着一次数据传输的终止。停止信号也是由主控器主动建立的,建立该信号之后,I2C 总线将返回空闲状态。
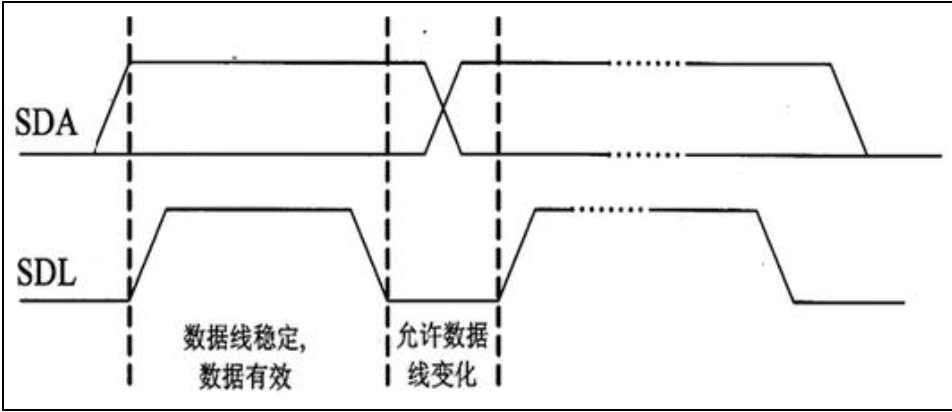
④数据位传送
在 I2C 总线上传送的每一位数据都有一个时钟脉冲相对应(或同步控制),即在 SCL 串行时钟的配合下,在 SDA 上逐位地串行传送每一位数据。进行数据传送时,在 SCL 呈现高电平期间,SDA 上的电平必须保持稳定,低电平为数据 0,高电平为数据 1。只有在 SCL 为低电平期间,才允许 SDA 上的电平改变状态。
⑤应答信号(ACK 和 NACK)
I2C 总线上的所有数据都是以 8 位字节传送的,发送器每发送一个字节,就在时钟脉冲 9 期间释放数据线,由接收器反馈一个应答信号。应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节;应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。对
于反馈有效应答位 ACK 的要求是,接收器在第 9 个时钟脉冲之前的低电平期间将 SDA 线拉低,并且确保在该时钟的高电平期间为稳定的低电平。
如果接收器是主控器,则在它收到最后一个字节后,发送一个 NACK 信号,以通知被控发送器结束数据发送,并释放 SDA 线,以便主控接收器发送一个停止信号。

1. 编写 IIC 的通信程序 iic_com.v
module iic_com ( input CLK, input RSTn, input [1:0] Start_Sig, //read or write command input [7:0] Addr_Sig, //eeprom words address input [7:0] WrData, //eeprom write data output [7:0] RdData, //eeprom read data output Done_Sig, //eeprom read/write finish output SCL, inout SDA ); parameter F100K = 9'd500; //100Khz的时钟分频系数 reg [4:0]i; reg [4:0]Go; reg [9:0]C1; reg [7:0]rData; reg rSCL; reg rSDA; reg isAck; reg isDone; reg isOut; assign Done_Sig = isDone; assign RdData = rData; assign SCL = rSCL; assign SDA = isOut ? rSDA : 1'bz; //SDA数据输出选择 //****************************************// //* I2C读写处理程序 *// //****************************************// always @ ( posedge CLK or negedge RSTn ) if( !RSTn ) begin i <= 5'd0; Go <= 5'd0; C1 <= 9'd0; rData <= 8'd0; rSCL <= 1'b1; rSDA <= 1'b1; isAck <= 1'b1; isDone <= 1'b0; isOut <= 1'b1; end else if( Start_Sig[0] ) //I2C 数据写 case( i ) 0: // iic Start begin isOut <= 1; //SDA端口输出 if( C1 == 0 ) rSCL <= 1'b1; else if( C1 == 400 ) rSCL <= 1'b0; //SCL由高变低 if( C1 == 0 ) rSDA <= 1'b1; else if( C1 == 200 ) rSDA <= 1'b0; //SDA先由高变低 if( C1 == F100K -1) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 1: // Write Device Addr begin rData <= {4'b1010, 3'b000, 1'b0}; i <= 5'd7; Go <= i + 1'b1; end 2: // Wirte Word Addr begin rData <= Addr_Sig; i <= 5'd7; Go <= i + 1'b1; end 3: // Write Data begin rData <= WrData; i <= 5'd7; Go <= i + 1'b1; end 4: //iic Stop begin isOut <= 1'b1; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; //SCL先由低变高 if( C1 == 0 ) rSDA <= 1'b0; else if( C1 == 300 ) rSDA <= 1'b1; //SDA由低变高 if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 5: begin isDone <= 1'b1; i <= i + 1'b1; end //写I2C 结束 6: begin isDone <= 1'b0; i <= 5'd0; end 7,8,9,10,11,12,13,14: //发送Device Addr/Word Addr/Write Data begin isOut <= 1'b1; rSDA <= rData[14-i]; //高位先发送 if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 300 ) rSCL <= 1'b0; if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 15: // waiting for acknowledge begin isOut <= 1'b0; //SDA端口改为输入 if( C1 == 100 ) isAck <= SDA; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 300 ) rSCL <= 1'b0; if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 16: if( isAck != 0 ) i <= 5'd0; else i <= Go; endcase else if( Start_Sig[1] ) //I2C 数据读 case( i ) 0: //iic Start begin isOut <= 1; //SDA端口输出 if( C1 == 0 ) rSCL <= 1'b1; else if( C1 == 400 ) rSCL <= 1'b0; //SCL由高变低 if( C1 == 0 ) rSDA <= 1'b1; else if( C1 == 200 ) rSDA <= 1'b0; //SDA先由高变低 if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 1: // Write Device Addr begin rData <= {4'b1010, 3'b000, 1'b0}; i <= 5'd9; Go <= i + 1'b1; end 2: // Wirte Word Addr begin rData <= Addr_Sig; i <= 5'd9; Go <= i + 1'b1; end 3: //iic Start again begin isOut <= 1'b1; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 500 ) rSCL <= 1'b0; //SCL后变低 if( C1 == 0 ) rSDA <= 1'b0; else if( C1 == 100 ) rSDA <= 1'b1; else if( C1 == 300 ) rSDA <= 1'b0; //SDA先变低 if( C1 == 600 -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 4: // Write Device Addr ( Read ) begin rData <= {4'b1010, 3'b000, 1'b1}; i <= 5'd9; Go <= i + 1'b1; end 5: // Read Data begin rData <= 8'd0; i <= 5'd19; Go <= i + 1'b1; end 6: //iic Stop begin isOut <= 1'b1; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; //SCL先变高 if( C1 == 0 ) rSDA <= 1'b0; else if( C1 == 300 ) rSDA <= 1'b1; //SDA后变高 if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 7: //写I2C 结束 begin isDone <= 1'b1; i <= i + 1'b1; end 8: begin isDone <= 1'b0; i <= 5'd0; end 9,10,11,12,13,14,15,16: //发送Device Addr(write)/Word Addr/Device Addr(read) begin isOut <= 1'b1; rSDA <= rData[16-i]; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 300 ) rSCL <= 1'b0; if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 17: // waiting for acknowledge begin isOut <= 1'b0; //SDA端口改为输入 if( C1 == 200 ) isAck <= SDA; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 300 ) rSCL <= 1'b0; if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 18: if( isAck != 0 ) i <= 5'd0; else i <= Go; 19,20,21,22,23,24,25,26: // Read data begin isOut <= 1'b0; if( C1 == 200 ) rData[26-i] <= SDA; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 300 ) rSCL <= 1'b0; if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= i + 1'b1; end else C1 <= C1 + 1'b1; end 27: // no acknowledge begin isOut <= 1'b1; if( C1 == 0 ) rSCL <= 1'b0; else if( C1 == 100 ) rSCL <= 1'b1; else if( C1 == 300 ) rSCL <= 1'b0; if( C1 == F100K -1 ) begin C1 <= 9'd0; i <= Go; end else C1 <= C1 + 1'b1; end endcase endmodule
Iic_com 读写程序分为 IIC 数据读和 IIC 数据写,通过状态机 i 来切换 IIC 的不同状态,譬如接收到写命令,状态机i=0 转入 Start 状态,SDA 先变低,再 SCL 变低;状态机i=1 开 始转入写 IIC 从设备地址 0x80; 之后状态机转到7开始发送8位的数据,其中状态机i=7,8,9,10,11,12,13,14 是 IIC 发送8位的数据,然后状态机进入 i=15 等待 IIC 从设备的应答信号。状态机 i=16 为判断是否有应答,如果有的话状态机转到 i=2 写 IIC 的地址,然后状态机又是重复i=7,8,9,10,11,12,13,14 发送8位的地址和 i=15 等待应答,i=16 判断应答。最后状态机 i=3 开始发送 IIC 写数据。发送完数据 i=4 发送 Stop 信号。IIC 读的流程跟写差不多,我就不再重复了,大家具体看程序和程序的说明吧!
2. 编写顶层文件 eeprom_test.v
`timescale 1ns / 1ps ////////////////////////////////////////////////////////////////////////////////// // Module Name: eeprom_test // Function: write and read eeprom using I2C bus ////////////////////////////////////////////////////////////////////////////////// module eeprom_test ( input CLK_50M, input RSTn, output [3:0]LED, output SCL, inout SDA ); wire [7:0] RdData; wire Done_Sig; reg [3:0] i; reg [3:0] rLED; reg [7:0] rAddr; reg [7:0] rData; reg [1:0] isStart; assign LED = rLED; /***************************/ /* EEPROM write and read */ /***************************/ always @ ( posedge CLK_50M or negedge RSTn ) if( !RSTn ) begin i <= 4'd0; rAddr <= 8'd0; rData <= 8'd0; isStart <= 2'b00; rLED <= 4'b0000; end else case( i ) 0: if( Done_Sig ) begin isStart <= 2'b00; i <= i + 1'b1; end else begin isStart <= 2'b01; rData <= 8'h12; rAddr <= 8'd0; end //eeprom write 0x12 to EEPROM addr 0 1: if( Done_Sig ) begin isStart <= 2'b00; i <= i + 1'b1; end else begin isStart <= 2'b10; rAddr <= 8'd0; end //eeprom read data from EEPROM addr 0 2: begin rLED <= RdData[3:0]; end endcase /***************************/ //I2C通信程序// /***************************/ iic_com U1 ( .CLK ( CLK_50M ), .RSTn ( RSTn ), .Start_Sig ( isStart ), .Addr_Sig ( rAddr ), .WrData ( rData ), .RdData ( RdData ), .Done_Sig ( Done_Sig ), .SCL ( SCL ), .SDA ( SDA ) ); endmodule
顶层文件实现以下两部分功能:
1. 上电后写一个数据到 EEPROM 的地址 0, 再读出地址 0 的内容。这里我们写的数据是 0x12,用户可以自行修改。
2. 例化 iic_com 模块,verilog 通过模块调用或称为模块实例化的方式来实现 iic_com 子模块与顶层模块 eeprom_test 的连接, 模块例化有利于简化每一个模块的代码,易于维护和修改。