%模糊控制器设计
a=newfis('fuzzf'); %创建新的模糊推理系统
%输入1
f1=1;
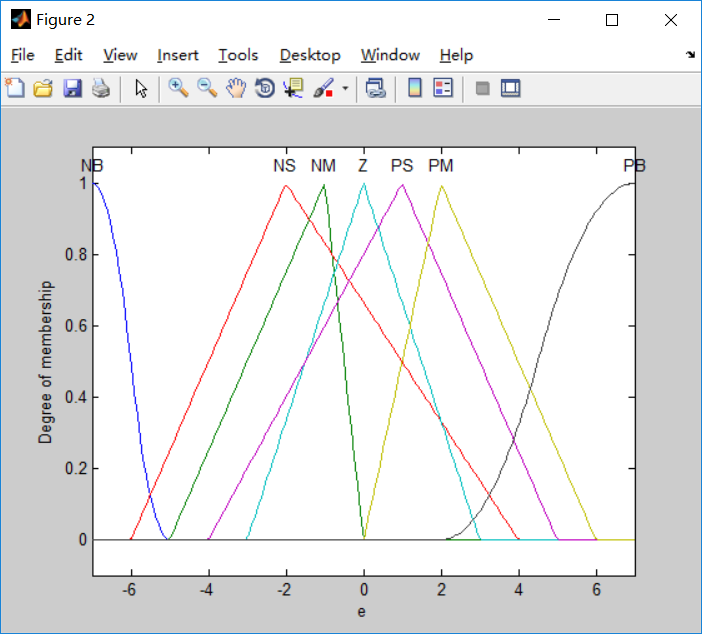
a=addvar(a,'input','e',[-7*f1,7*f1]);
%添加 e 的模糊语言变量
a=addmf(a,'input',1,'NB','zmf',[-7*f1,-5*f1]);
%添加 e 的模糊语言变量的隶属度函数(z型)
a=addmf(a,'input',1,'NM','trimf',[-5*f1,-1*f1,0]);
%隶属度函数为三角形
a=addmf(a,'input',1,'NS','trimf',[-6*f1,-2*f1,4*f1]);
a=addmf(a,'input',1,'Z','trimf',[-3*f1,0,3*f1]);
a=addmf(a,'input',1,'PS','trimf',[-4*f1,1*f1,5*f1]);
a=addmf(a,'input',1,'PM','trimf',[0,2*f1,6*f1]);
a=addmf(a,'input',1,'PB','smf',[2*f1,7*f1]);
%输入2
f2=1;
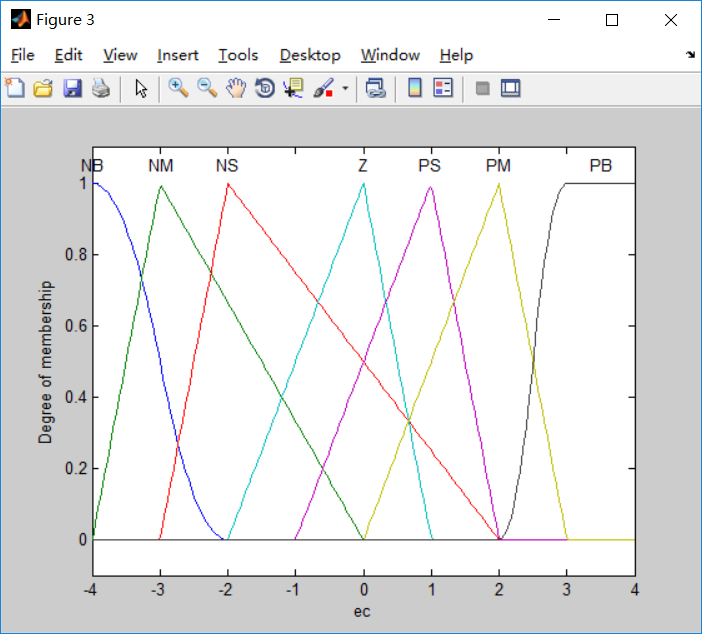
a=addvar(a,'input','ec',[-4*f2,4*f2]);
%添加 ec 的模糊语言变量
a=addmf(a,'input',2,'NB','zmf',[-4*f2,-2*f2]);
a=addmf(a,'input',2,'NM','trimf',[-4*f2,-3*f2,0]);
a=addmf(a,'input',2,'NS','trimf',[-3*f2,-2*f2,2*f2]);
a=addmf(a,'input',2,'Z','trimf',[-2*f2,0,1*f2]);
a=addmf(a,'input',2,'PS','trimf',[-1*f2,1*f2,2*f2]);
a=addmf(a,'input',2,'PM','trimf',[0,2*f2,3*f2]);
a=addmf(a,'input',2,'PB','smf',[2*f2,3*f2]);
%输出
f3=1.5;
a=addvar(a,'output','u',[-5*f3,5*f3]);
%添加 u 的模糊语言变量
a=addmf(a,'output',1,'NB','zmf',[-5*f3,-2*f3]);
a=addmf(a,'output',1,'NM','trimf',[-4*f3,-3*f3,0]);
a=addmf(a,'output',1,'NS','trimf',[-3*f3,-1*f3,1*f3]);
a=addmf(a,'output',1,'Z','trimf',[-3*f3,0,2*f3]);
a=addmf(a,'output',1,'PS','trimf',[-2*f3,1*f3,3*f3]);
a=addmf(a,'output',1,'PM','trimf',[0,2*f3,3*f3]);
a=addmf(a,'output',1,'PB','smf',[1*f3,4*f3]);
%规则库
rulelist=[1 1 1 1 1; %编辑模糊规则,后俩个数分别是规则权重和AND OR选项
1 2 2 1 1;
1 3 1 1 1;
1 4 2 1 1;
1 5 2 1 1;
1 6 4 1 1;
1 7 4 1 1;
2 1 1 1 1;
2 2 2 1 1;
2 3 2 1 1;
2 4 5 1 1;
2 5 3 1 1;
2 6 4 1 1;
2 7 5 1 1;
3 1 1 1 1;
3 2 2 1 1;
3 3 2 1 1;
3 4 2 1 1;
3 5 6 1 1;
3 6 4 1 1;
3 7 5 1 1;
4 1 1 1 1;
4 2 1 1 1;
4 3 3 1 1;
4 4 4 1 1;
4 5 3 1 1;
4 6 4 1 1;
4 7 6 1 1;
5 1 2 1 1;
5 2 2 1 1;
5 3 3 1 1;
5 4 4 1 1;
5 5 2 1 1;
5 6 4 1 1;
5 7 5 1 1;
6 1 1 1 1;
6 2 2 1 1;
6 3 3 1 1;
6 4 2 1 1;
6 5 3 1 1;
6 6 5 1 1;
6 7 5 1 1;
7 1 3 1 1;
7 2 2 1 1;
7 3 2 1 1;
7 4 2 1 1;
7 5 3 1 1;
7 6 5 1 1;
7 7 5 1 1;
];
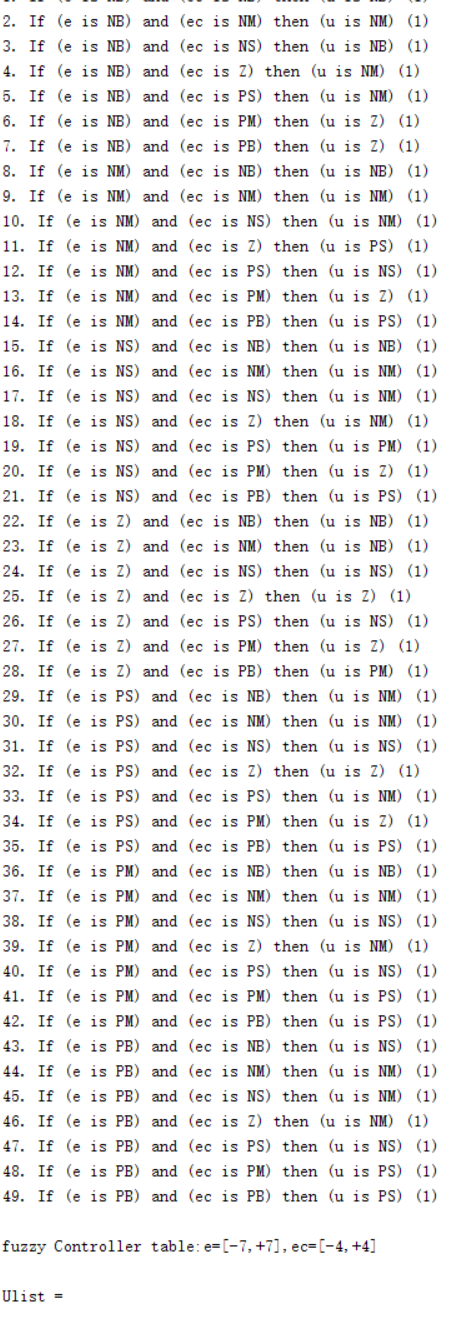
a=addrule(a,rulelist); %添加模糊规则函数
showrule(a) %显示模糊规则函数
a1=setfis(a,'DefuzzMethod','centroid'); %设置解模糊方法
writefis(a1,'fuzzf'); %保存模糊系统
a2=readfis('fuzzf'); %从磁盘读出保存的模糊系统
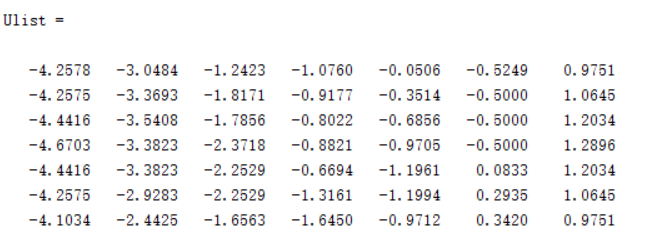
disp('fuzzy Controller table:e=[-7,+7],ec=[-4,+4]');%显示矩阵和数组内容
%推理
Ulist=zeros(7,7); %全零矩阵
for i=1:7
for j=1:7
e(i)=-4+i;
ec(j)=-4+j;
Ulist(i,j)=evalfis([e(i),ec(j)],a2); %完成模糊推理计算
end
end
% Ulist=ceil(Ulist) %朝正无穷方向取整
Ulist %朝正无穷方向取整
%画出模糊系统
figure(1); plotfis(a2);
figure(2);plotmf(a,'input',1);
figure(3);plotmf(a,'input',2);
figure(4);plotmf(a,'output',1);
运行截图:
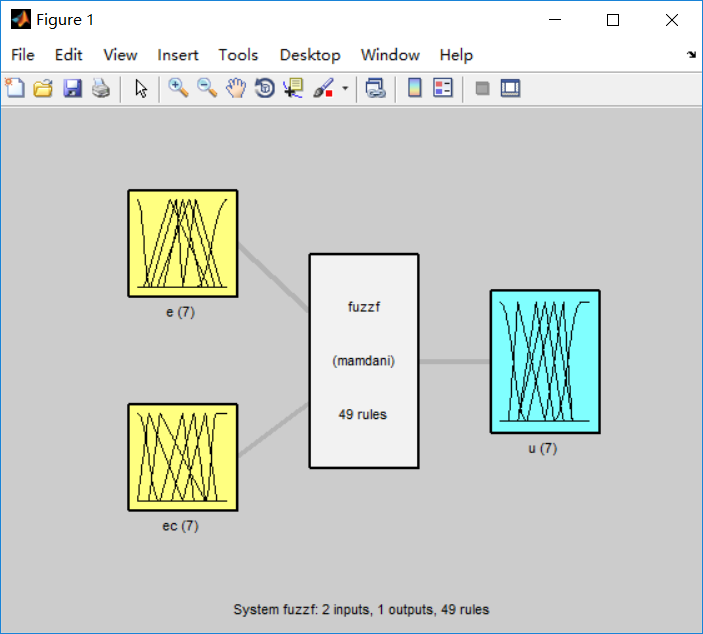

结论:
通过MATLAB集成的模糊控制模块,我们能够更加方便地对应偏差e,ec和控制量u的关系,并可以调节e,ec在不同值下u的对应输出。
通过addvar()函数能添加一个模糊语言变量,并设置范围:
a=addvar(a,'input','e',[-5*f1,5*f1]);
通过addmf()函数进行e的模糊语言变量的隶属度函数添加
a=addmf(a,'input',1,'NB','zmf',[-4*f1,-1*f1]);
%添加 e 的模糊语言变量的隶属度函数(z型)
通过对规则库对与类型和或类型的条件进行设置,1为与,0为或。
例如:1 2 2 1 1 表示
(e is NB) and (ec is NM) then (u is NM)
1->NB 2->NM 2->NM 1->权重 1->and
所以表示NB与NM的结果是NM。