你了解机器人云台吗?它的作用是什么?在生活中又有那些应用?科技创新的精妙在生活中有很多,我们需要的是发现它们的眼睛和思考的智慧。多学习机器人知识,了解机器人云台的概念及其应用,我们才能有更深刻的体会。
ScorpionX MX-64机器人云台就是一款为实验者、机器人专家和爱好者准备的高性能云台的平台,它很容易让你在令人激动的物理计算领域轻松起步!

什么是云台?
在日常生活中,云台主要用来固定物体。准确地说,云台是一种可以多角度调节的支撑设备。类似于人的脖子可以支撑着脑袋,并通过转动来调节视野。
ScorpionX MX-64 机器人云台这个易于构建的套件基于独有的ArbotiX 控制器和超大扭矩MX-64Dynamixel执行机构,赋予它一些重要的有效载荷能力。它包括构建高性能、完全可编程、与Arduino兼容的云台所需的一切。添加网络摄像头、激光器、气枪、各种传感器到可用的I/O、Xbee到PC的无线链接、PWM伺服、两个小型直流电机,以及额外的MX-64 Dynamixel执行器,以定制您的项目。ArbotiX 控制器还可以使用Arduino IDE进行自定义编程,以使用感官输入或各种其他自定义应用程序实现自主行为-极限是您的想象力!
产品特点

套装包含
|
ArbotiX 控制器 |
|
2x MX-64 Dynamixel 舵机 |
|
RX-64 FR05-H101K Hinge Frame Set 结构套件 |
|
RX-64/EX-106+ FR05-S101K Side Frame Set 结构套件 |
|
Dynamixel Robot Turret Base & Hardware Kit云台底座和硬件套件 |
|
12v10a 电源适配器 |
|
FTDI USB 数据线 |
ArbotiX说明
ArbotiX 控制器是AX-12A伺服舵机/仿生机器人以及任何类型的中小型机器人的高级控制解决方案。它集成了强大的AVR微控制器、XBEE无线收音机、双电机驱动器和3针伺服式IO头。 ArbotiX 控制器专门设计用于控制使用Bioloid系统和AX-12A伺服系统制造的机器人,尽管它也是功能强大的漫游车的高端解决方案。它不是CM-5的替代品,而是用于制造更复杂机器人的高级开发工具。
有关完整信息和产品手册,请查看制造商页面。
16MHz AVR微控制器(ATMEGA644p)。 2个串行端口,1个专用于Bioloid伺服控制器,另一个专用于XBEE无线电 船上有3个Bioloid AX-12A型端口,直接插入您的AX-12A伺服系统! 32个I/O,其中8个可作为模拟输入 所有8个模拟输入和8个数字IO上的伺服式3针头(gnd、vcc、信号) 双1A电机驱动器,带有组合电机/编码器头。 XBEE收音机单独出售。典型的安装需要2个XBEE收音机和一个带USB电缆的XBEE explorer,以便能够从计算机无线控制您的机器人。 2.8英寸x2.8英寸,安装孔设计用于匹配许多双倍体配置。

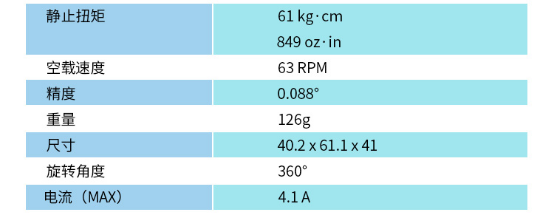
MX-64 机器人伺服舵机
入门指南
• ArbotiX Getting Started Guide• DYNAMIXEL ID Guide• Turret Assembly Guide• Build Check / Test Program• XBee Configuration Optional• ArbotiX Commander Setup Optional• LiPo Battery Guide Optional
演示代码
• Analog Joystick Control for the ScorpionX Robot Turret• Wireless Handheld Control for the ScorpionX Robot Turret• DYNAPose - DYNAMIXEL/ArbotiX Pose Tool• Untethered Pose Playback with DYNAMIXEL/ArbotiX• Virtual Commander - Generic Software Robot Control• LIDAR Lite Mapping with DYNAMIXEL Servos
项目
• Turret Gun Coming Soon
旧版下载(仅供参考)
• Interbotix Robot Turret Manual & Protocol• Arduino Firmware Sketch & VB .NET Sample Application