前面已经介绍了矩阵的零空间和列空间,它们都属于矩阵的四个基本子空间,基本子空间还包括行空间和左零空间。
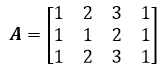
召唤一个矩阵:
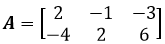
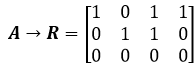
为了找出零空间和列空间,先进行套路运算——转换为行最简阶梯矩阵:

只有一个主元,也就是仅有一个向量都是独立向量,列空间是:

这同时也意味着矩阵A的秩是1。矩阵的秩、列空间的基的向量数、独立向量数、主元数,这些都是一个意思,只是用于不同场景中,这些概念往往容易让人混淆。实际上直到今天,我仍然会对一些概念产生一瞬间或几分钟的困惑,不得不重新翻阅资料。
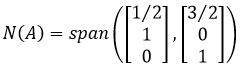
再来看零空间,主元可以用另外两个自由元表示,这里用x2和x3表示x1:

A的零空间:
左零空间
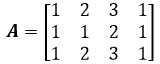
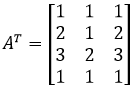
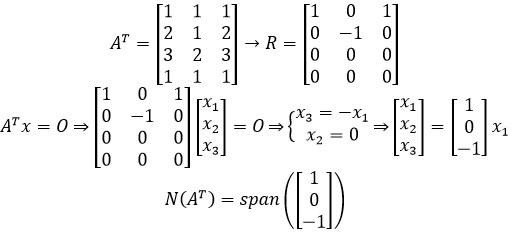
零空间关注的是Ax = 0的解,除此之外,我们还想关注转置后的A形成的方程的性质,也就是ATx = 0的解。还是刚才的矩阵,看看A转置后的零空间:

套路运算,行最简阶梯型矩阵:

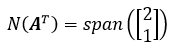
第二列可以用第一列表示,第二列是第一列的线性组合,只有一个独立向量,只有一个主元,秩是1……一大堆相似概念,最终可以得到这样的方程:

AT的零空间:
独立地看,AT的零空间是ATx = O的解,这又有什么用呢?它与Ax = O有什么关系?

如果把等式两边同时转置,右侧依然是趴下的零向量,左侧:

这下清晰了,A的零空间是将A右乘x;如果左乘x就是AT的零空间:

由于x在A的左侧,所以AT的零空间也叫A的左零空间。
行空间
A的行空间也就是AT的列空间,A的秩是在回答A中有多少列是线性无关的,AT是在回答A中有多少行是线性无关的。有趣的是,A的秩和AT的秩相等。理解这里一点很有用,尤其是在确定列空间的基时,辅助行空间可以帮助我们避免一些陷阱,比如下面这个矩阵:
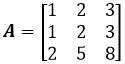
三列是否是线性无关的?如果最有一个列向量是<3, 3, 7>,那么很明显第三个向量可以由前两个向量代替,现在第三个向量稍稍偏移了一点,所以三个向量应该是线性无关的。真是这样吗?
实际上我们不必去计算,A的列向量之间的关系没那么明显,但是行向量则不然——前两个行向量相同,A中只有两个线性无关的行向量,也就是A的秩是2,所以A的列向量也不是独立向量。
空间和维数
前面已经多次出现过维度的概念,如果有一个Am×n矩阵,它的四个基本子空间的维数各是多少呢?
只要清楚四个基本子空间的概念,这个问题就比较容易回答。列空间的一组基一定包含A的一个列向量,这个列向量是m维的,所以列空间一定在Rm中;同理,行空间在Rn中。具体来说,由于秩是r,所以列空间是Rm中的r维子空间,行空间是Rn中的r维子空间。
零空间是Ax = 0中x的解,x是n维向量,所以零空间在Rn中;同理,左零空间在Rm中。零空间的维数是由自由元决定的,自由元等于矩阵列数减去主元个数,也就是n – r,所以零空间是n维空间内的n – r维子空间。左零空间是m维空间内的m – r维子空间。
总结一下:
列空间,位于Rm下的r维空间
行空间,位于Rn下的r维空间
零空间,位于Rn下的 n – r维空间
左零空间,位于Rm下的 m – r维子空间
行空间的基
可以先对矩阵转置,在通过列空间的方式寻找行空间的基。这样做没错,但多少有些无聊,我们更希望一次就能同时找到列空间和行空间的基。看个例子:
A的列空间和行空间都比较容易确定,甚至不需要化简:

虽然列空间和行空间的独立向量个数相等,但列空间和行空间可不行等,所以还是需要某种通用的方法。仍然是先将A化简为行最简阶梯形矩阵:
R是A的行最简阶梯矩阵,通过R可以确认A的秩r = 2。下面是关键:对于A来说,行空间的基是R的前r行,即:

之所以能够得到这样的结论,是因为从A到R的变换本来就是通过行的线性变换得到的,变换到最后,R中只留下了线性无关的行向量。这实际是在说,R是最简行阶梯矩阵,R中的每一级阶梯都是线性无关的。
左零空间的基
召唤一个矩阵:
直接的方法是使用左零空间的定义,将A转置,然后求解AT的零空间:
这和求解零空间一样,化简为行最简阶梯形矩阵:
这就是A的左零空间。这样计算简单粗暴。
另外一种方法是使用高斯-诺当消元法,通过记录行变换的方式找到左零空间。这种方法的大概思路是和求逆矩阵类似,其过程是使[Am×n Im×m]→[Rm×n Em×m],如果A是方阵,R是单位矩阵,则转化过程和求逆一致。
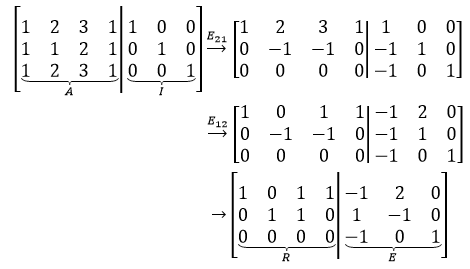
E实际上是记录了从A到R的初等行变换,EA = R。如果用《线性代数9——消元矩阵与置换矩阵》中的方法写出来,其过程如下:
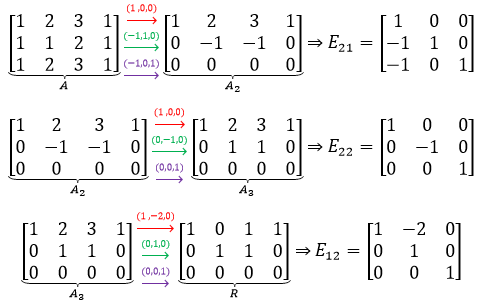
最终的消元矩阵:
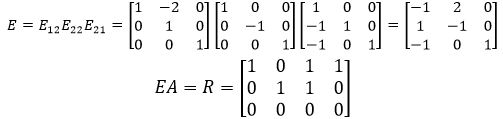
费了很大劲求出E,目的是为了得到A的左零空间,R的最后一行是OT,也就是说E的最后一行与A的乘积是OT:
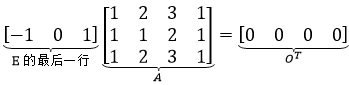
这相当于:
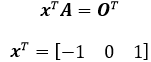
现在可以确定,A的左零空间是:
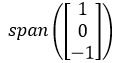
这个方法的思路是寻找一个零行向量OT的行组合。
作者:我是8位的
