参考:
一,卡尔曼滤波作用
卡尔曼滤波是来帮助我们做测量的,如果你要测量的东西很容易测准确,没有什么随机干扰,那真的不需要劳驾卡尔曼先生。但在有的时候,我们的测量因为随机干扰,无法准确得到,卡尔曼先生就给我们想了个办法,让我们在干扰为高斯分布的情况下,得到的测量均方误差最小,也就是测量值扰动最小,看起来最平滑。
所谓滤波,实际上是要去掉自己不想要的信号,保留想要的部分。一般来说,是把过程中的噪声去掉。
二,方法
直接称:测量值 有误差
来估计:估计值
1,观测值与估计值分别加一个权值,再做平均,两个权值加起来等于一。
2,权值的确定由以往表现来确定,表现的好就相信多,权值高,表现不好,权值低
3,表现好是指的测量结果稳定,方差很小。表现不好,是估计值,观测值不稳定,方差大。
4,多次观测和估计,达到准确的测量,会进行多次调整。
5,调整是指的把估计值和实测值比较一下,如果估计值小于测量值,就把估计值加上他们之间的偏差做出新的估计值,前面加个加权系数。
解释:观察值Z,估计值X,新的估计:Xnew = X + K ( Z-X),X估计小了,那么新的估计值会加上一个量K ( Z-X), 如果估计值大了,大过Z了,那么新的估计值就会减去一个量K ( Z-X),这就保证新的估计值一定比现在的准确。一次一次递推下去就会越来越准确,K为权值,也就是卡尔曼增益。Xnew = X + K ( Z-X) = X ×(1-K) + KZ,也就是说估计值X的权值是1-k,而观察值Z的权值是k,究竟k 取多大,全看估计值和观察值以前的表现,也就是他们的方差情况了。
协方差矩阵:
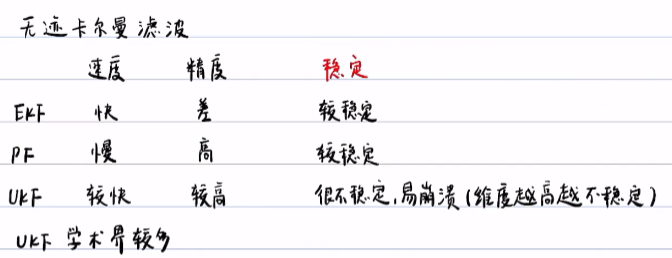
无迹卡尔曼滤波器
特点:速度精度都较好,但是不稳定。学术界多,工业界少。
UT变换:
取三个粒子,代替x的正态分布N(0.1)
为什么取三个例子:期望,方差,对称,所以取三个粒子。

三个粒子要带权重:正态分布是不平的,越接近期望,概率越大

λ为大于0的参数,可以任意取。
期望和方差计算方法:

计算y的期望和方差:

但是精度有问题:
EKF具有一阶精度,UKF具有二阶精度