SIFT特征-尺度不变特征理解
简介
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。该方法于1999年由David Lowe首先发表于计算机视觉国际会议(International Conference on Computer Vision,ICCV),2004年再次经David Lowe整理完善后发表于International journal of computer vision(IJCV)。截止2014年8月,该论文单篇被引次数达25000余次。

特点
- 对旋转、尺度缩放、亮度变化保持不变性,对视角变化、噪声等也存在一定程度的稳定性
- 独特性,信息量丰富,适用于在海量特征数据中进行快速,准确的匹配
- 多量性,即使少数几个物体也可以产生大量的Sfit特征向量
- 可扩展性,可以很方便的与其他形式的特征向量进行联合
高斯图像金字塔
理解
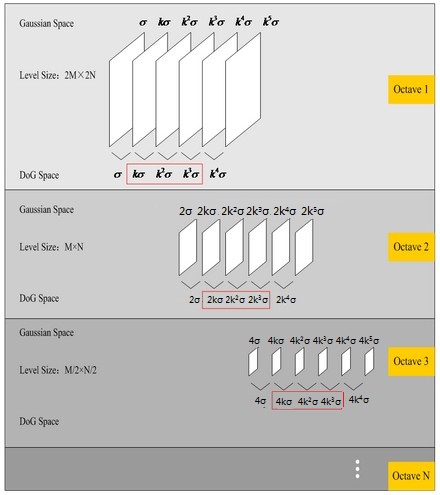
高斯图像金字塔是把原图像先放大一倍(如150✖150到300✖300),对这个放大后的图像进行高斯滤波(之前讲过的高斯模糊,可以回去看一下),其中模糊半径分别取σ、kσ、k^2σ等等,得到若干个模糊后的图像,这是第一组,然后依次按照比例为2缩小图像,如此重复,构建一个有若干组(Octave)的金字塔,每组分为若干层。
补充
用O表示octave(第几组),用L表示layer(第几层),则(O,L)就代表高斯图像空间中的确定的一副图像。
DOG金字塔
理解
DOG金字塔(Difference of Gaussian)就是高斯金字塔同一octave下相邻两层的差分构成的金字塔。

解释
之所以要构建差分金字塔,就是为了找到在不同尺度和不同模糊程度下的不变特征,而这正式SIFT要提取的"稳定"特征。
空间极值点检测
理解
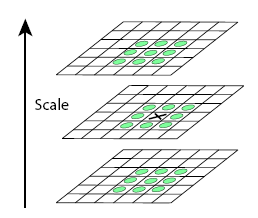
这里的空间极值点检测,其实就是在DOG空间的一个octave下比较每一个像素和它相邻点的大小,看它是否比其他点都要大。如果比周围点都大,说明它是是局部的极值点(这一点我们可以类比一个二次函数,它的最低点是不是比周围点都小,所以它是极值点,当然它也恰巧是最低点)。
补充
这里我们要计算图中打x的点是不是极值点,那么我们就要比较它与不同层以及同层的周围一共26个点的大小,才能确定它是不是空间的极值点。
关键点精确定位
理解
由于我们上面的操作都是在离散空间操作的,我们知道,离散空间取到的极值点,并不一定是真正的极值点,所以我们需要通过类似函数拟合的方式,对离散点进行拟合使之连续,在连续空间就很容易利用我们的知识求取极值点。

计算
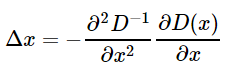
我们将DOG空间的泰勒展开式子看成其拟合函数,就可以操作连续空间的函数了。
候选特征点x,其偏移量定义为Δx,其对比度为D(x)的绝对值∣D(x)∣,对D(x)应用泰勒展开式

由于x是D(x)的极值点,所以对上式求导并令其为0,得到
然后再把求得的Δx代入到D(x)的泰勒展开式中

设对比度的阈值为T,若∣D(x^)∣≥T,则该特征点保留,否则剔除掉。
关键方向匹配
理解
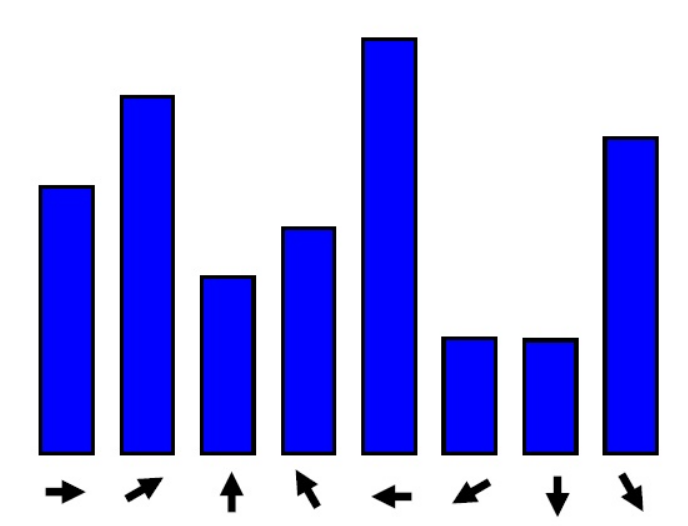
上面说了,SIFT特征具有旋转不变性,而它的旋转不变性就在于每一个关键点都有一个基准方向,而这个基准方向是由图像的局部决定和分配的。
计算
梯度的模值和方向定义如下:


利用这个公式计算以关键点为中心的领域内所有点的梯度方向(8个方向),计算完之后,我们使用直方图来统计领域内像素的梯度和方向。梯度直方图将0~360度的方向分为36个立柱,每柱10度。直方图的峰值代表的是该关键点的主方向。为了增强鲁棒性,如果由立柱的值大于峰值的80%,我们将其作为关键点的辅方向。(下图只花了8个方向)。
关键点描述
理解
关键点描述是对领域内高斯图像直方图统计结果的一种表示形式,我们找到的特征点参数有位置、尺度和方向。在关键点周围的领域内,将其分为m✖m个子块,每个子块以中间点为原点,分别计算梯度直方图,生成局部向量,对该向量进行标准高斯函数加权处理,然后对特征向量进行归一化处理。每个关键点在下图中可以产生2✖2✖8维向量作为特征向量。
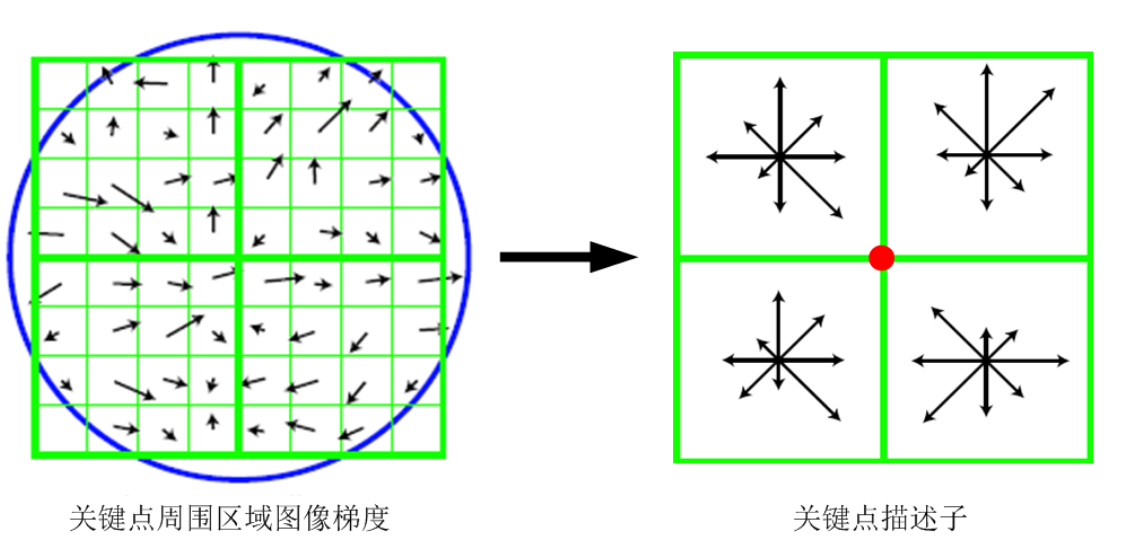
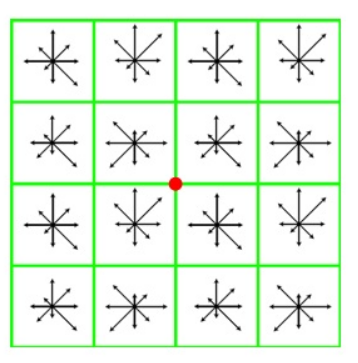
David G.Lowed的实验结果表明:对每个关键点,采用448共128维向量的描述子进项关键点表征,综合效果最佳:
特征点匹配
理解
有了目标图片,对目标图片计算SIFT特征,然后用其特征向量与已知特征的特征向量进行欧式距离匹配,其欧式距离越小,匹配度越高。