众所周知,ros自带了通讯的一系列方法,萌新最先开始学习的就是话题通讯机制。
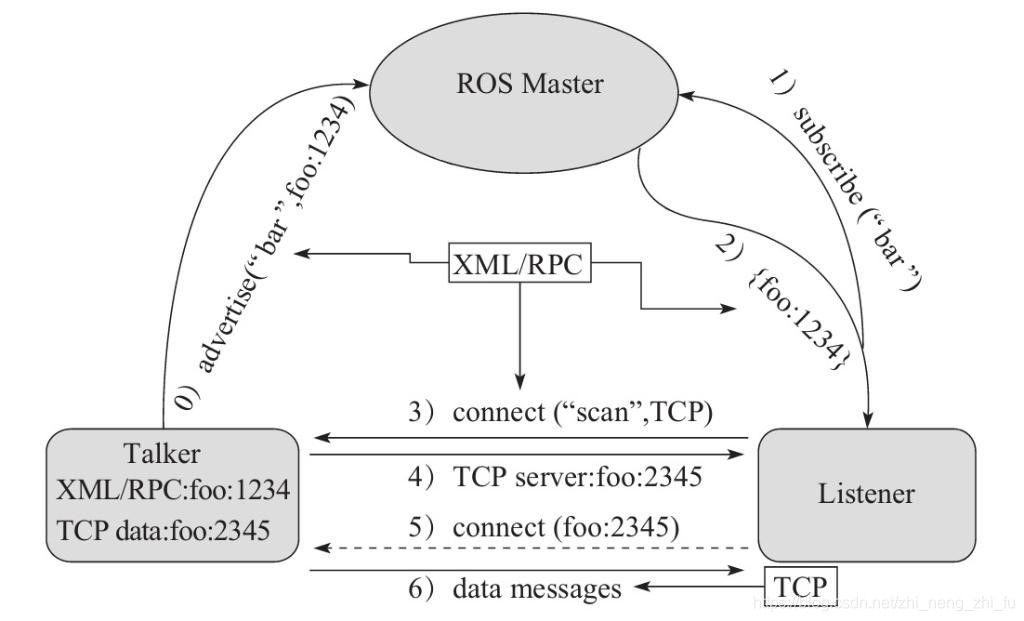
萌新的立即就是:它就是一个封装的TCP协议,是建立好了连接之后再传输数据的一种方法,注意是建立连接的。
话不多说,直接上代码吧。
发布端:
#include<ros/ros.h> #include"std_msgs/String.h"//与之前不同,这里我们需要额外添加一个头文件用来通讯 int main(int argc,char *argv[]) { ros::init(argc,argv,"My_Information"); //定义句柄 ros:: NodeHandle nh;//定义一个节点 ros::Publisher pub=nh.advertise<std_msgs::String>("Info",10);//发布话题"Info",定义信息长度 std_msgs::String msg;//定义一个message对象 ros::Rate rate(10);//调用一个计时API,频率为10 int count=0;//计数器 while(ros::ok())//这里意思是:只要当前节点存在,就继续循环 { //msg.data="hello"; count++; std::stringstream ss;//定义一个字符串 ss<<"hello --->"<<count;//和计数器连接 msg.data=ss.str();//赋值 pub.publish(msg);//发布 ROS_INFO("the date is %s",ss.str().c_str());//输出日志 rate.sleep();//频率为10Hz,停止 } return 0; }
订阅端:
#include<ros/ros.h> #include<std_msgs/String.h>//同上 void doMsg(const std_msgs::String::ConstPtr &msg)//这里需要定义一个回执函数 { ROS_INFO("the date is:%s",msg->data.c_str()); } int main(int argc, char *argv[]) { ros::init(argc,argv,"Get_Information"); ros::NodeHandle nh;//定义一个节点 ros::Subscriber sub=nh.subscribe("Info",10,doMsg);接收一次,执行一次函数 ros::spin();//这个类似goto的东西,类似循环吧 return 0; }