北 京 航 空 航 天 大 学
自动控制原理实验报告

自动控制与测试教学实验中心
实验三控制系统串联矫正
实验时间 2013/12/11 实验编号 三 同组同学 无
一、实验目的
1.了解和掌握串联校正的分析和设计方法。
2.研究串联校正环节对系统稳定性及过渡过程的影响。
二、实验内容
2.设计串联滞后校正,并验证。
- 实验原理
1.系统结构图如图 3-1 所示

图3-1 系统结构图
其中为 校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
2.系统模拟电路如图3-2所示.
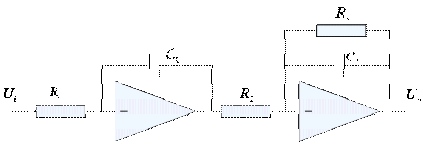
图3-2 系统模拟电路图
本实验的电阻取值:
3.未加矫正时,
4.加串联超前矫正时,
 。给定
。给定 ,则
,则 。
。
5.加串联滞后矫正时,
 。给定
。给定 ,则
,则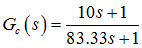 。
。
6.设计超前校正环节。
系统的闭环传递函数为

闭环极点:

阻尼比 ,自然频率
,自然频率
因为 很小,所以这个系统在阶跃响应中具有很大的超调量,不是所希望的。
很小,所以这个系统在阶跃响应中具有很大的超调量,不是所希望的。
 ,且无阻尼自然频率为
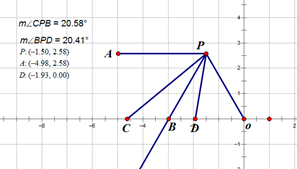
,且无阻尼自然频率为 。希望的主导闭环极点的位置
。希望的主导闭环极点的位置


幅角缺额= ,必须由超前校正装置提供。
,必须由超前校正装置提供。
零点位于
极点位于
因此,可以得到
利用幅值条件可以确定 的值,
的值,

因此,设计出的超前校正装置为
现需设计一个超前校正装置 ,以便主导闭环极点的阻尼比
,以便主导闭环极点的阻尼比
7.设计滞后校正环节。
系统的闭环传递函数为

闭环极点:

阻尼比 ,自然频率
,自然频率 ,静态速度误差常数为:
,静态速度误差常数为:
现在希望将静态速度误差 增大到
增大到 ,为了使静态速度误差常速增大到约8倍,选择
,为了使静态速度误差常速增大到约8倍,选择 ,并将滞后校正装置的零点和极点分别配置到
,并将滞后校正装置的零点和极点分别配置到 和
和 。这时,滞后校正装置的传递函数为
。这时,滞后校正装置的传递函数为
校正系统的开环传递函数这时为



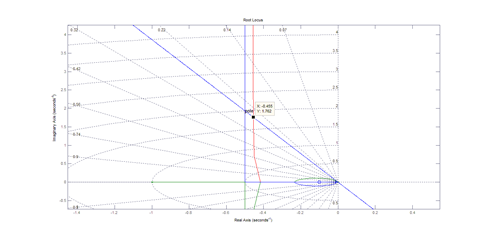
根据新的根轨迹图,求得极点

开环增益K由幅值条件确定


于是,已校正系统的开环传递函数:
静态速度误差常数 为:
为: ,这样就基本达到了调节静态速度误差常数的目的。
,这样就基本达到了调节静态速度误差常数的目的。
四、实验设备
1. HHMN-1 型电子模拟机一台。
2. PC 机一台。
3. 数字式万用表一块。
五、实验步骤
1.熟悉 HHMN-1 型电子模拟机的使用方法。将各运算放大器接成比例器,通电调零。断开电源,按照系统结构图和系统传递函数计算电阻和电容的取值,并按照模拟线路图搭接线路,不用的运算放大器接成比例器。
2.将 D/A1 与系统输入端 Ui 连接,将 A/D1 与系统输出端 Uo 连接(此处连接必须谨慎,不可接错)。线路接好后,经教师检查后再通电。
3.在 Windows XP 桌面用鼠标双击"MATLAB"图标后进入,在命令行处键入"autolab"进入实验软件系统。
4.在系统菜单中选择实验项目,选择"实验三",在窗口左侧选择"实验模型",其它步骤察看概述 3.2 节内容。
5.分别完成不加校正、加入超前校正、加入滞后校正的实验。在系统模型上的"Manual Switch"处可设置系统是否加入校正环节,在" GC (s) "处可设置校正环节的传递函数。
6.绘制以上三种情况时系统的波特图。
7.采用示波器"Scope"观察阶跃响应曲线。观测试验结果,记录实验数据,绘制实验结果图形,完成实验报告。
8.研究性实验方法。实验者可自行确定系统传递函数,同时设计校正环节,并建立系统的 SIMULINK 模型,
验证自动控制理论相关的理论知识。实现步骤可查看概述 3.3 节内容。
六、实验结果
1.不加校正的系统。
传递函数为: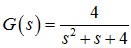
 (考虑5%的误差标准,阶跃响应信号在0.5s时开始产生)
(考虑5%的误差标准,阶跃响应信号在0.5s时开始产生)
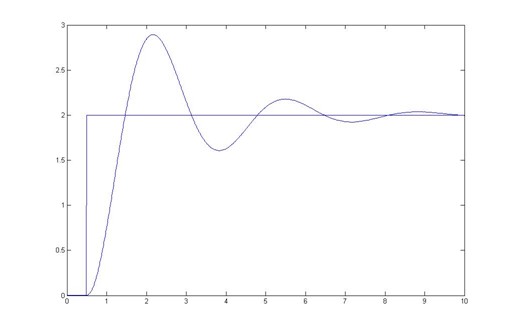
图3- 系统不加校正的阶跃响应曲线
截止频率为: 1.8791
稳定裕度为:28.0202
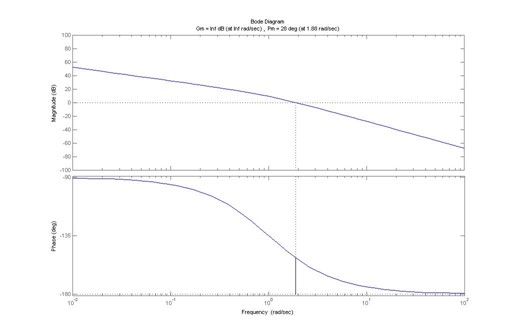
图3- 系统不加校正的波特图
2.添加超前矫正的系统。
传递函数为:
 (考虑5%的误差标准,阶跃响应信号在0.5s时开始产生)。
(考虑5%的误差标准,阶跃响应信号在0.5s时开始产生)。
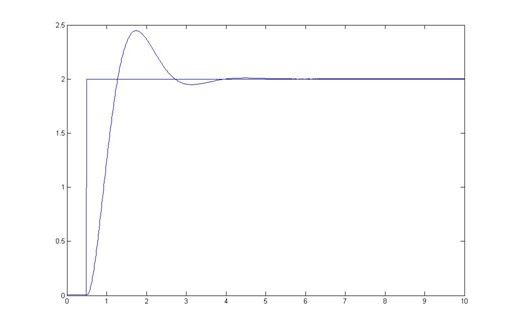
图3- 系统加超前校正的阶跃响应曲线
截止频率为: 2.3763
稳定裕度为:47.3714
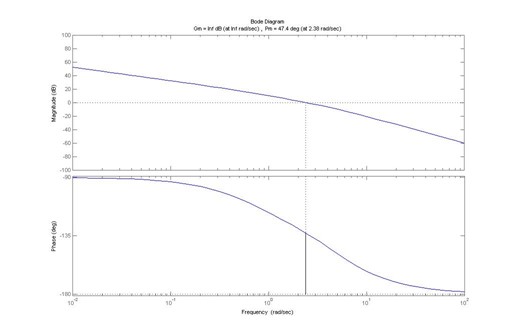
图3- 系统加超前校正的波特图
3.添加滞后校正的系统。
传递函数为:
 (考虑5%的误差标准,阶跃响应信号在0.5s时开始产生)。
(考虑5%的误差标准,阶跃响应信号在0.5s时开始产生)。
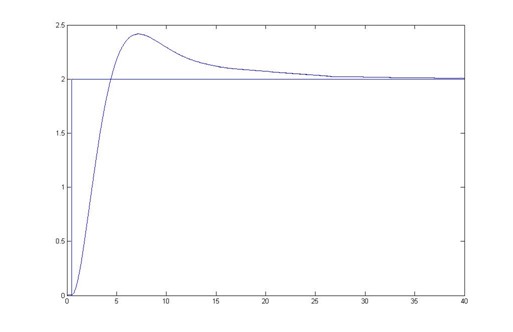
图3- 系统加滞后校正的阶跃响应曲线
截止频率为:0.4486
稳定裕度为:54.8055
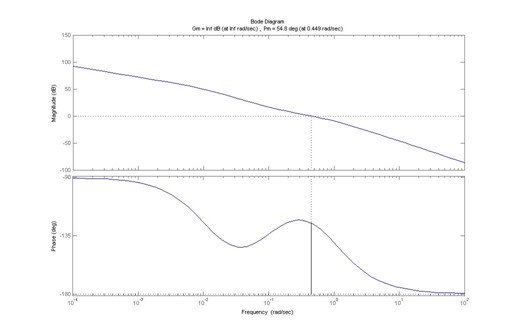
图3- 系统加滞后校正的波特图
七、结果分析
添加超前校正装置,有效提高了阻尼比,系统的震荡幅度减弱,收敛更迅速,过渡过程时间明显减少。
添加滞后校正装置,系统的过渡过程时间明显变长。对于斜坡输入信号,具有更小的稳态误差。
八、收获、体会及建议
本实验的实验操作部分比较简单,但是自己设计超前校正装置和滞后校正装置比较繁琐。由于对matlab的指令不熟悉,同时,网络找不到相应的的资料,花费了很多精力来计算参数的值和画出过程中的示意图。
另一方面,更进一步的了解控制系统的设计原理,初步掌握了调整系统性能的方法。掌握了一些基本的matlab指令(如:bode, rlocus)。