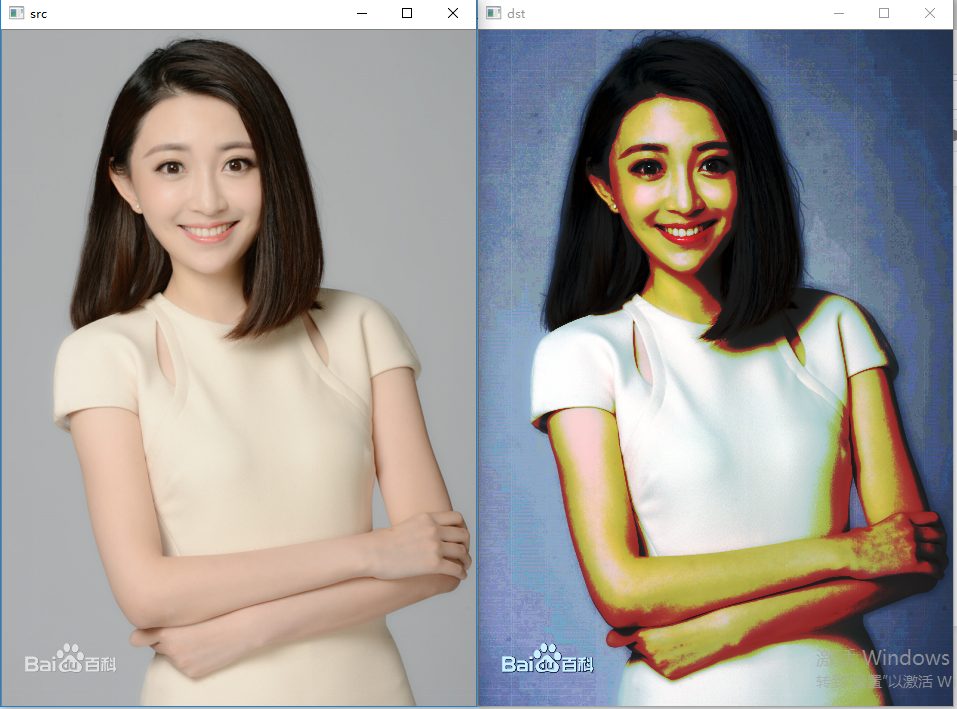
# 本质: 统计每个像素灰度 出现的概率 0-255 p # 累计概率 # 1 0.2 0.2 第一个灰度等级它出现的概率是0.2 # 2 0.3 0.5 第二个灰度等级它出现的概率是0.3 # 3 0.1 0.6 第三个灰度等级它出现的概率是0.1 # 256 # 100 0.5 255*0.5 = new import cv2 import numpy as np import matplotlib.pyplot as plt img = cv2.imread('image0.jpg',1) cv2.imshow('src',img) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] #gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #cv2.imshow('src',gray) count_b = np.zeros(256,np.float) count_g = np.zeros(256,np.float) count_r = np.zeros(256,np.float) for i in range(0,height): for j in range(0,width): #pixel = gray[i,j] #index = int(pixel) #count[index] = count[index]+1 (b,g,r) = img[i,j] index_b = int(b) index_g = int(g) index_r = int(r) count_b[index_b] = count_b[index_b]+1 count_g[index_g] = count_g[index_g]+1 count_r[index_r] = count_r[index_r]+1 for i in range(0,255): count_b[i] = count_b[i]/(height*width) count_g[i] = count_g[i]/(height*width) count_r[i] = count_r[i]/(height*width) # 计算累计概率 sum_b = float(0) sum_g = float(0) sum_r = float(0) for i in range(0,256): sum_b = sum_b+count_b[i] sum_g = sum_g+count_g[i] sum_r = sum_r+count_r[i] count_b[i] = sum_b count_g[i] = sum_g count_r[i] = sum_r #print(count) # 计算映射表 map_b = np.zeros(256,np.uint16) map_g = np.zeros(256,np.uint16) map_r = np.zeros(256,np.uint16) for i in range(0,256): map_b[i] = np.uint16(count_b[i]*255) map_g[i] = np.uint16(count_g[i]*255) map_r[i] = np.uint16(count_r[i]*255) # 映射 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): #pixel = gray[i,j]# 获取当前的像素值 #gray[i,j] = map1[pixel] (b,g,r) = img[i,j] b = map_b[b] g = map_g[g] r = map_r[r] dst[i,j] = (b,g,r) #cv2.imshow('dst',gray) cv2.imshow('dst',dst) cv2.waitKey(0)

# 本质: 统计每个像素灰度 出现的概率 0-255 p # 累计概率 # 1 0.2 0.2 第一个灰度等级它出现的概率是0.2 # 2 0.3 0.5 第二个灰度等级它出现的概率是0.3 # 3 0.1 0.6 第三个灰度等级它出现的概率是0.1 # 256 # 100 0.5 255*0.5 = new import cv2 import numpy as np import matplotlib.pyplot as plt img = cv2.imread('image0.jpg',1) cv2.imshow('src',img) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] #gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #cv2.imshow('src',gray) count_b = np.zeros(256,np.float) count_g = np.zeros(256,np.float) count_r = np.zeros(256,np.float) for i in range(0,height): for j in range(0,width): #pixel = gray[i,j] #index = int(pixel) #count[index] = count[index]+1 (b,g,r) = img[i,j] index_b = int(b) index_g = int(g) index_r = int(r) count_b[index_b] = count_b[index_b]+1 count_g[index_g] = count_g[index_g]+1 count_r[index_r] = count_r[index_r]+1 for i in range(0,256): count_b[i] = count_b[i]/(height*width) count_g[i] = count_g[i]/(height*width) count_r[i] = count_r[i]/(height*width) # 计算累计概率 sum_b = float(0) sum_g = float(0) sum_r = float(0) for i in range(0,256): sum_b = sum_b+count_b[i] sum_g = sum_g+count_g[i] sum_r = sum_r+count_r[i] count_b[i] = sum_b count_g[i] = sum_g count_r[i] = sum_r #print(count) # 计算映射表 map_b = np.zeros(256,np.uint16) map_g = np.zeros(256,np.uint16) map_r = np.zeros(256,np.uint16) for i in range(0,256): map_b[i] = np.uint16(count_b[i]*255) map_g[i] = np.uint16(count_g[i]*255) map_r[i] = np.uint16(count_r[i]*255) # 映射 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): #pixel = gray[i,j]# 获取当前的像素值 #gray[i,j] = map1[pixel] (b,g,r) = img[i,j] b = map_b[b] g = map_g[g] r = map_r[r] dst[i,j] = (b,g,r) #cv2.imshow('dst',gray) cv2.imshow('dst',dst) cv2.waitKey(0)

# 本质: 统计每个像素灰度 出现的概率 0-255 p # 累计概率 # 1 0.2 0.2 第一个灰度等级它出现的概率是0.2 # 2 0.3 0.5 第二个灰度等级它出现的概率是0.3 # 3 0.1 0.6 第三个灰度等级它出现的概率是0.1 # 256 # 100 0.5 255*0.5 = new import cv2 import numpy as np import matplotlib.pyplot as plt img = cv2.imread('image2.jpg',1) cv2.imshow('src',img) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] #gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #cv2.imshow('src',gray) count_b = np.zeros(256,np.float) count_g = np.zeros(256,np.float) count_r = np.zeros(256,np.float) for i in range(0,height): for j in range(0,width): #pixel = gray[i,j] #index = int(pixel) #count[index] = count[index]+1 (b,g,r) = img[i,j] index_b = int(b) index_g = int(g) index_r = int(r) count_b[index_b] = count_b[index_b]+1 count_g[index_g] = count_g[index_g]+1 count_r[index_r] = count_r[index_r]+1 for i in range(0,256): count_b[i] = count_b[i]/(height*width) count_g[i] = count_g[i]/(height*width) count_r[i] = count_r[i]/(height*width) # 计算累计概率 sum_b = float(0) sum_g = float(0) sum_r = float(0) for i in range(0,256): sum_b = sum_b+count_b[i] sum_g = sum_g+count_g[i] sum_r = sum_r+count_r[i] count_b[i] = sum_b count_g[i] = sum_g count_r[i] = sum_r #print(count) # 计算映射表 map_b = np.zeros(256,np.uint16) map_g = np.zeros(256,np.uint16) map_r = np.zeros(256,np.uint16) for i in range(0,256): map_b[i] = np.uint16(count_b[i]*255) map_g[i] = np.uint16(count_g[i]*255) map_r[i] = np.uint16(count_r[i]*255) # 映射 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): #pixel = gray[i,j]# 获取当前的像素值 #gray[i,j] = map1[pixel] (b,g,r) = img[i,j] b = map_b[b] g = map_g[g] r = map_r[r] dst[i,j] = (b,g,r) #cv2.imshow('dst',gray) cv2.imshow('dst',dst) cv2.waitKey(0)