
边缘检测的实质其实就是图像的卷积运算。


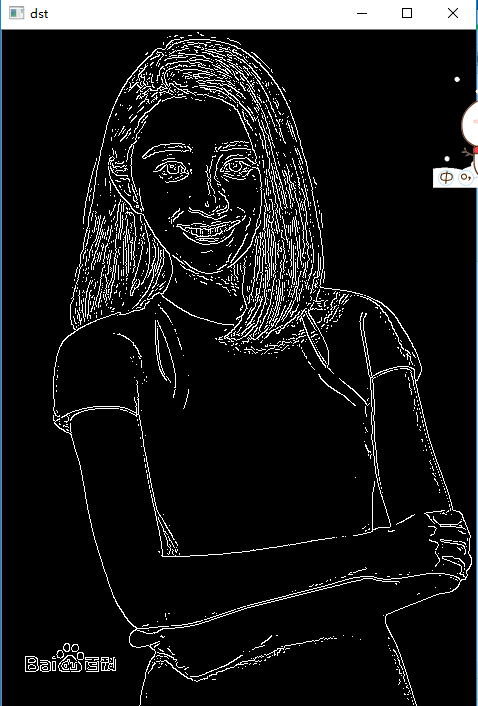
import cv2 import numpy as np import random img = cv2.imread('image1.jpg',1) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] cv2.imshow('src',img) #canny 边缘检测 1 gray 2 高斯滤波(去除噪声的干扰) 3 canny 调用opencv中的canny方法 gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) imgG = cv2.GaussianBlur(gray,(3,3),0)#灰度图像数据 模板大小 这是一个滤波功能 dst = cv2.Canny(img,50,50)# 1 data 2 th 如果图片经过卷积之后的值大于这个门限,那么我们就认为是边缘点 #图片卷积——》th cv2.imshow('dst',dst) cv2.waitKey(0)