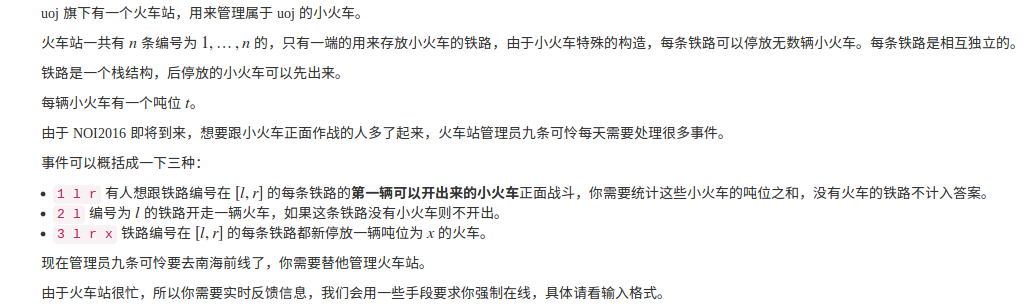
Description
Solution
实际上添加问题就是一个线段树区间覆盖问题,打标记就好
对于弹栈操作比较难搞,实际上也就是一个历史查询,我们不需要保存栈中的每一个元素,我们通过查找历史状态就可以了
这样用主席树维护复杂度是 (O(n*logn)) 的
具体是这样的:
假设我们要弹出位置 (x) 的栈顶元素,那么在线段树中维护一个值 (t),表示最近的一次修改是 (t) 时刻
那么上上次修改就可以通过查询 (t-1) 时刻的 (t) 找出,相当于保存了一个前驱
用主席树维护这个时间就好了
注意内存有些卡,有一些技巧:
1.首先对于查询的线段树是全局的,不需要动态开点
2.对于线段树中的一个节点 (x) ,如果它的左右儿子都没有儿子,那么下一次做区间覆盖时,就不需要对 (x) 新建两个节点
#include<bits/stdc++.h>
#define lo (o<<1)
#define ro (o<<1|1)
using namespace std;
const int N=5e5+10;
int n,m,ty,rt[N],a[N],tt=0;
struct data{
int ls,rs,lag;
data(){lag=-1;}
}tr[N*130];
int T[N*4],la[N*4],in[N*130];
inline void pushdown(int o){
if(tr[o].lag==-1)return ;
int t=tr[o].lag;tr[o].lag=-1;
if(!in[o] || in[tr[o].ls] || in[tr[o].rs]){
tr[++tt]=tr[tr[o].ls];tr[o].ls=tt;
tr[++tt]=tr[tr[o].rs];tr[o].rs=tt;in[o]=1;
}
int ls=tr[o].ls,rs=tr[o].rs;
tr[ls].lag=t;tr[rs].lag=t;
}
inline void Push(int o,int l,int r){
if(la[o]==-1)return ;
int k=la[o],mid=(l+r)>>1;la[o]=-1;
T[lo]=k*(mid-l+1);la[lo]=k;
T[ro]=k*(r-mid);la[ro]=k;
}
inline void upd(int o){T[o]=T[lo]+T[ro];}
inline int qry(int o,int l,int r,int sa,int se){
if(sa<=l && r<=se)return T[o];
int mid=(l+r)>>1,ret=0;
Push(o,l,r);
if(se<=mid)ret=qry(lo,l,mid,sa,se);
else if(sa>mid)ret=qry(ro,mid+1,r,sa,se);
else ret=qry(lo,l,mid,sa,mid)+qry(ro,mid+1,r,mid+1,se);
upd(o);
return ret;
}
inline int qt(int x,int l,int r,int sa){
if(l==r)return tr[x].lag;
int mid=(l+r)>>1,ret=0;
pushdown(x);in[x]=1;
if(sa<=mid)ret=qt(tr[x].ls,l,mid,sa);
else ret=qt(tr[x].rs,mid+1,r,sa);
return ret;
}
inline void add(int o,int l,int r,int sa,int se,int t){
if(sa<=l && r<=se){T[o]=(r-l+1)*t;la[o]=t;return ;}
Push(o,l,r);
int mid=(l+r)>>1;
if(se<=mid)add(lo,l,mid,sa,se,t);
else if(sa>mid)add(ro,mid+1,r,sa,se,t);
else add(lo,l,mid,sa,mid,t),add(ro,mid+1,r,mid+1,se,t);
upd(o);
}
inline void addtag(int &x,int l,int r,int sa,int se,int t){
tr[++tt]=tr[x];x=tt;
if(sa<=l && r<=se){tr[x].lag=t;return ;}
pushdown(x);
int mid=(l+r)>>1;in[x]=1;
if(se<=mid)addtag(tr[x].ls,l,mid,sa,se,t);
else if(sa>mid)addtag(tr[x].rs,mid+1,r,sa,se,t);
else addtag(tr[x].ls,l,mid,sa,mid,t),addtag(tr[x].rs,mid+1,r,mid+1,se,t);
}
int main(){
freopen("railway.in","r",stdin);
freopen("railway.out","w",stdout);
cin>>n>>m>>ty;
int op,l,r,ans=0,x,y;
memset(la,-1,sizeof(la));
for(int i=1;i<=m;i++){
rt[i]=rt[i-1];
scanf("%d%d",&op,&l);
l=(l+ans*ty)%n+1;
if(op==1){
scanf("%d",&r);
r=(r+ans*ty)%n+1;
if(l>r)swap(l,r);
printf("%d
",ans=qry(1,1,n,l,r));
}
else if(op==2){
x=qt(rt[i],1,n,l);
if(x){
y=qt(rt[x-1],1,n,l);
addtag(rt[i],1,n,l,l,y);add(1,1,n,l,l,a[y]);
}
}
else if(op==3){
scanf("%d%d",&r,&a[i]);
r=(r+ans*ty)%n+1;
if(l>r)swap(l,r);
add(1,1,n,l,r,a[i]);
addtag(rt[i],1,n,l,r,i);
}
}
return 0;
}