Canny 边缘提取的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是:
- 好的检测- 算法能够尽可能多地标识出图像中的实际边缘。
- 好的定位- 标识出的边缘要尽可能与实际图像中的实际边缘尽可能接近。
- 最小响应- 图像中的边缘只能标识一次,并且可能存在的图像噪声不应标识为边缘。
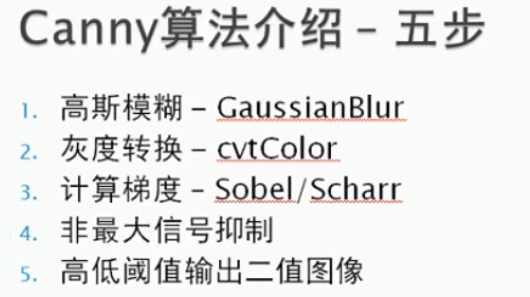
- 算法步骤:


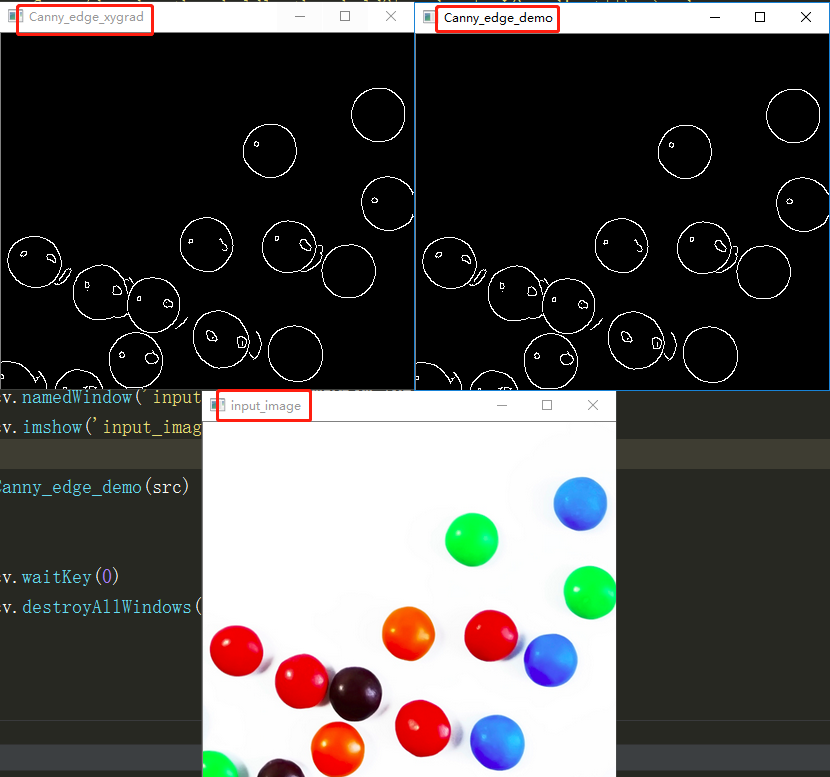
代码运行效果:
源码分析:
1 import cv2 as cv 2 import numpy as np 3 4 5 def Canny_edge_demo(image): 6 blurred = cv.GaussianBlur(image,(3,3),0) 7 gray = cv.cvtColor(blurred,cv.COLOR_BGR2GRAY) 8 # x gradient 9 xgrad = cv.Sobel(gray,cv.CV_16SC1,1,0) 10 # y gradient 11 ygrad = cv.Sobel(gray,cv.CV_16SC1,0,1) 12 """ 13 Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]]) -> edges 14 自定义梯度的Canny算法在图像中查找边缘 15 """ 16 edge_output = cv.Canny(xgrad,ygrad,50,150) 17 cv.imshow("Canny_edge_xygrad",edge_output) 18 """ 19 Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient]]]) -> edges 20 直接调用Canny算法在单通道灰度图像中查找边缘 21 """ 22 dst = cv.Canny(gray,50,150) 23 cv.imshow("Canny_edge_demo",dst) 24 25 src = cv.imread('smarties.png') 26 cv.namedWindow('input_image',cv.WINDOW_AUTOSIZE) 27 cv.imshow('input_image',src) 28 29 Canny_edge_demo(src) 30 31 32 cv.waitKey(0) 33 cv.destroyAllWindows()
注意:
OpenCV的Canny函数用于在图像中查找边缘,其函数原型有两种:
①直接调用Canny算法在单通道灰度图像中查找边缘,
其函数原型为:Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient]]]) -> edges
image参数表示8位输入图像。
threshold1参数表示设置的低阈值。
threshold2参数表示设置的高阈值,一般设定为低阈值的3倍 (根据Canny算法的推荐)。
edges参数表示输出边缘图像,单通道8位图像。
apertureSize参数表示Sobel算子的大小。
L2gradient参数表示一个布尔值,如果为真,则使用更精确的L2范数进行计算(即两个方向的倒数的平方和再开方),否则使用L1范数(直接将两个方向导数的绝对值相加)。
②使用带自定义图像渐变的Canny算法在图像中查找边缘,
其函数原型为:Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]]) -> edges
dx参数表示输入图像的x导数(x导数满足16位,选择CV_16SC1或CV_16SC3)
dy参数表示输入图像的y导数(y导数满足16位,选择CV_16SC1或CV_16SC3)。
threshold1参数表示设置的低阈值。
threshold2参数表示设置的高阈值,一般设定为低阈值的3倍 (根据Canny算法的推荐)。
edges参数表示输出边缘图像,单通道8位图像。
L2gradient参数表示L2gradient参数表示一个布尔值,如果为真,则使用更精确的L2范数进行计算(即两个方向的倒数的平方和再开方),否则使用L1范数(直接将两个方向导数的绝对值相加)。
参考:
Canny算子原理:
https://www.cnblogs.com/techyan1990/p/7291771.html