之前有讨论过梯度下降法:

参数迭代
于是会产生问题,学习参数过小,模型很难到达最优点,而参数过大,某个参数会发散。
小批量随机梯度下降也讨论过了(线性回归的公式如下):
那么动量法呢?
简单地将梯度下降公式增加一个动量V,迭代公式如下:
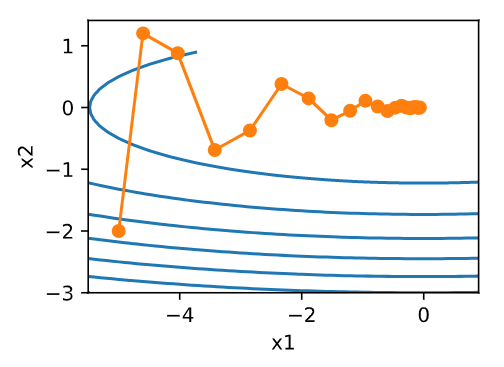
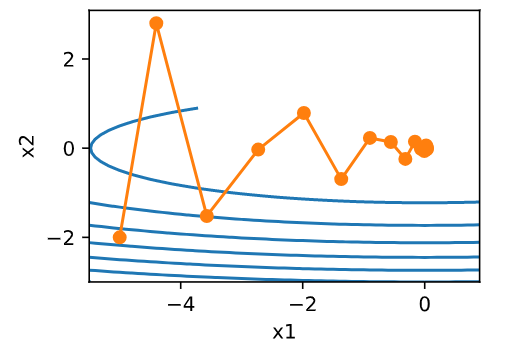
%matplotlib inline from mxnet import nd import numpy as np import gluonbook as gb def f_2d(x1,x2): return 0.1*x1**2 + 2*x2**2 eta = 0.4 def gd_2d(x1,x2,s1,s2): return (x1 - eta *0.2*x1,x2-eta*4*x2,0,0) def train_2d(trainer): x1,x2,s1,s2 = -5,-2,0,0 results = [(x1,x2)] for i in range(20): x1,x2,s1,s2 = trainer(x1,x2,s1,s2) results.append((x1,x2)) print('epoch %d, x1 %f, x2 %f' % (i + 1, x1, x2)) return results def show_trace_2d(f,results): gb.plt.plot(*zip(*results), '-o', color='#ff7f0e') x1, x2 = np.meshgrid(np.arange(-5.5, 1.0, 0.1), np.arange(-3.0, 1.0, 0.1)) gb.plt.contour(x1, x2, f(x1, x2), colors='#1f77b4') gb.plt.xlabel('x1') gb.plt.ylabel('x2') def momentum_2d(x1,x2,v1,v2): v1 = gamma * v1 + eta * 0.2 * x1 v2 = gamma * v2 + eta * 4 * x2 return x1 - v1,x2-v2,v1,v2 eta = 0.4 gamma = 0.5 show_trace_2d(f_2d,train_2d(momentum_2d))
eta = 0.6
show_trace_2d(f_2d,train_2d(momentum_2d))
原理:
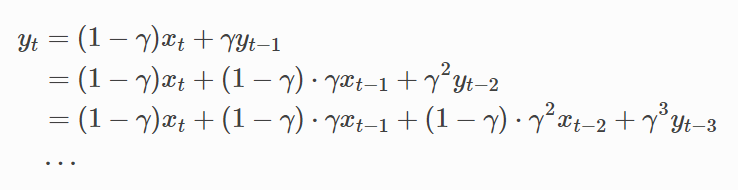
当前阶段 t (时间步t)的变量 yt 是上一个阶段 t-1 的变量 yt-1 与当前阶段的另一个变量xt的线性组合:

对yt展开:
容易知道(高等数学求极限):
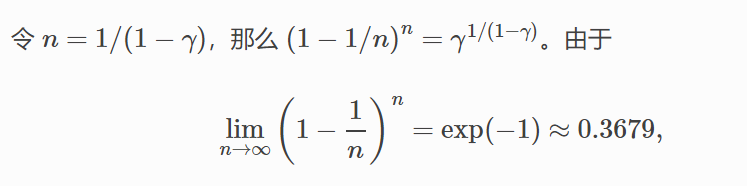
当gama 趋于 1 时,如0.95,也就是说:

即:

因此,常常将yt看做对最近 1/(1-gama) 个时间步的 xt 值得加权平均。例如,当 γ=0.95 时,yt 可以被看作是对最近 20 个时间步的 xt 值的加权平均;
当 γ=0.9 时,yt 可以看作是对最近 10 个时间步的 xt 值的加权平均。而且,离当前时间步 t 越近的 xt 值获得的权重越大(越接近 1)。
对动量法做同样的变形:
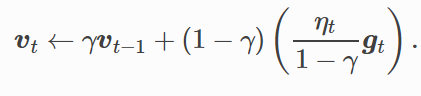
可以同样展开,即对序列
![]()
做了指数加权移动平均。
相比于小批量随机梯度下降,动量法每个阶段的自变量更新量近似于前者对应的最近1/1-gama个阶段做指数加权平均移动后除以1-gama。
动量法:
就是每次状态转移时,不仅取决于当前梯度,并且要取决于过去的各个梯度在各个方向上是否一致