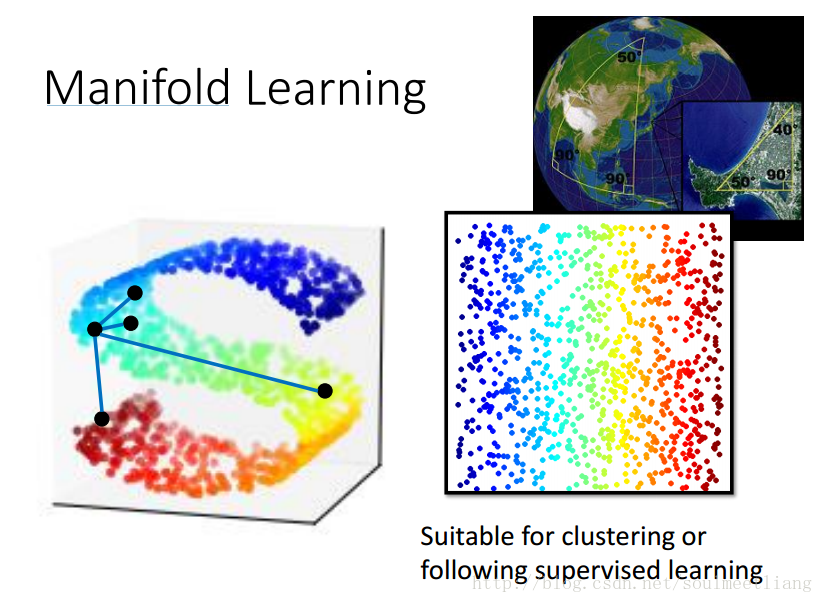
一 Manifold Learning
我们要做的是非线性的降维,data是分布在低维空间里面,只是被扭曲到了高维空间。 比如地球的表面是一个二维平面,但是被塞到一个三维空间中。 Manifold就是把S型摊平,将高维空间内的低维数据展开,这样才能计算点对点的距离。
二 几种方法
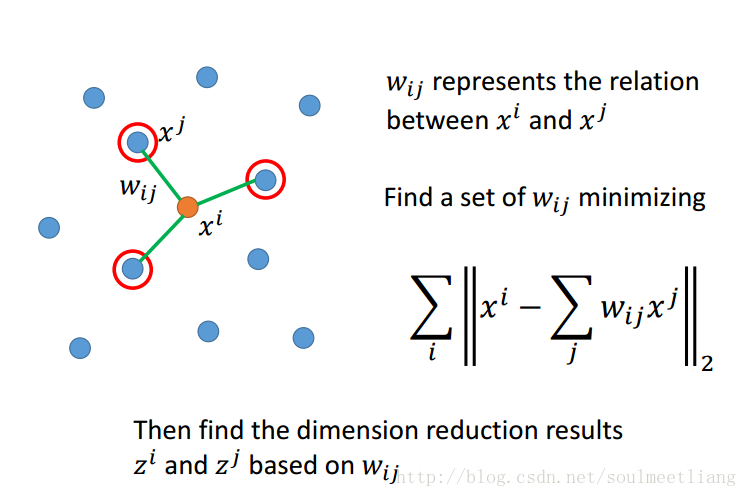
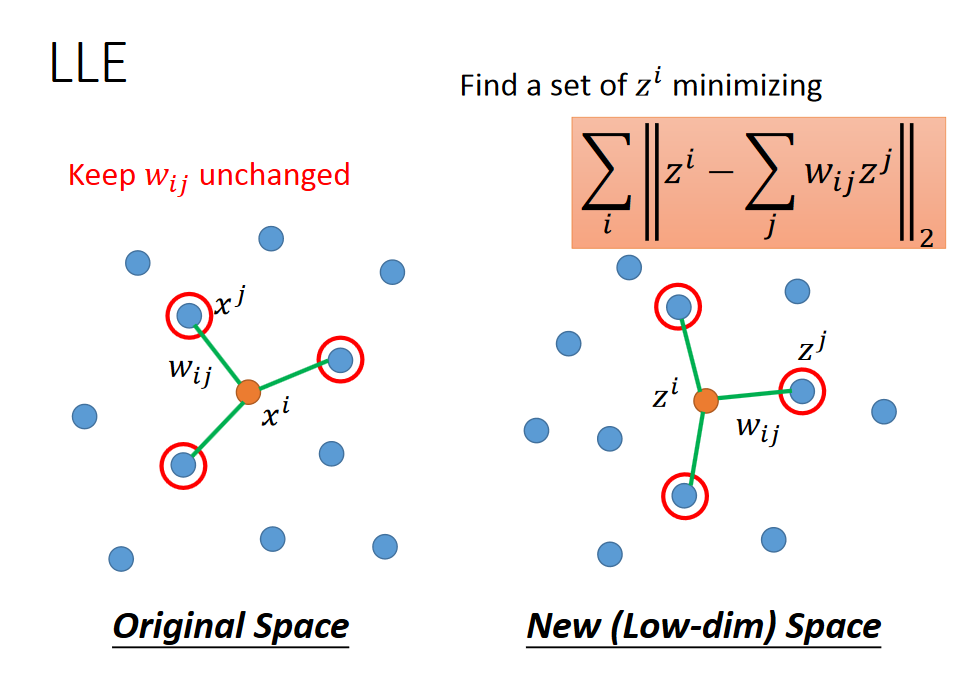
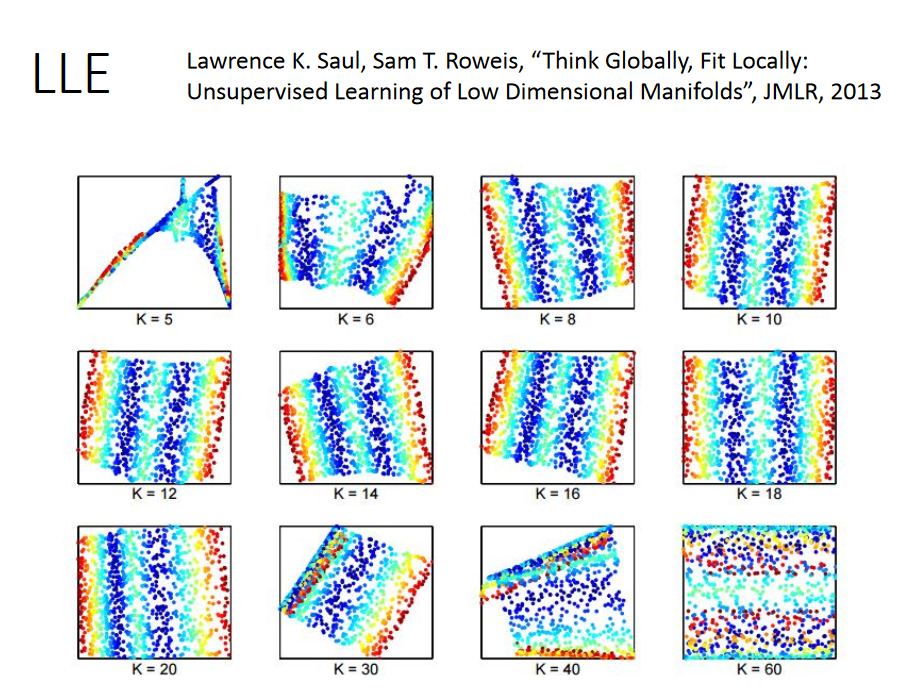
2.1 Locally Linear Embedding (LLE)
在原来的空间里面,有某点Xi,然后找到它的neighbor Xj,通过minimizing来找出Wij,再在降维后的空间里,找到基于不变的Wij参数的Zi和Zj。
形象的比喻:
转换过程:找到一个Zi,在原有的Wij不变的参数下,能有一组邻居使该公式minimize
LLE要选一个刚刚好的neighbor,K太大并不好,此时会有一些关系太弱的点,transform后不能被keep住,也就是说他们不是“比翼鸟”与“连理枝”。
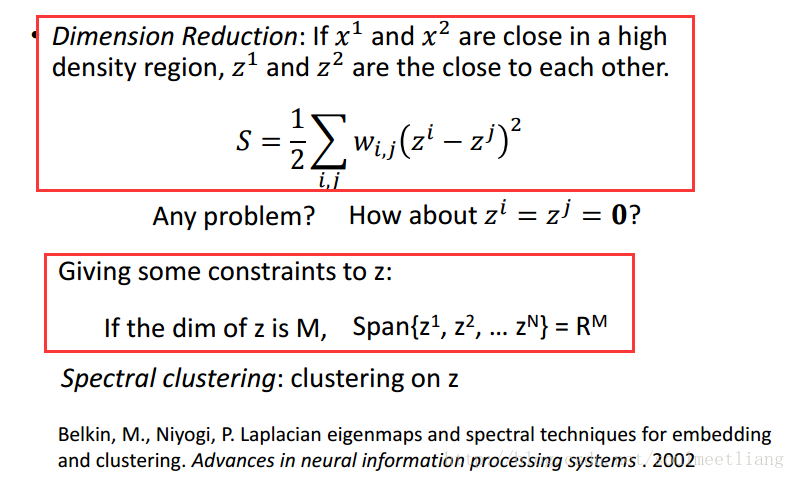
2.2 Laplacian Eigenmaps

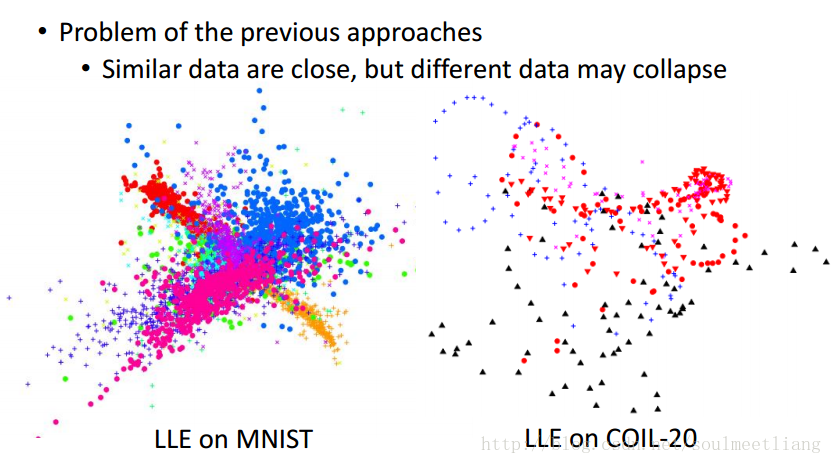
2.3 T-distributed Stochastic Neighbor Embedding (t-SNE)
t-SNE要解决什么样的问题呢? 前面的有一个最大的问题:他们只假设了相似的点接近,但没有说不同的点就一定要分离。 两个例子,都挤成一团。
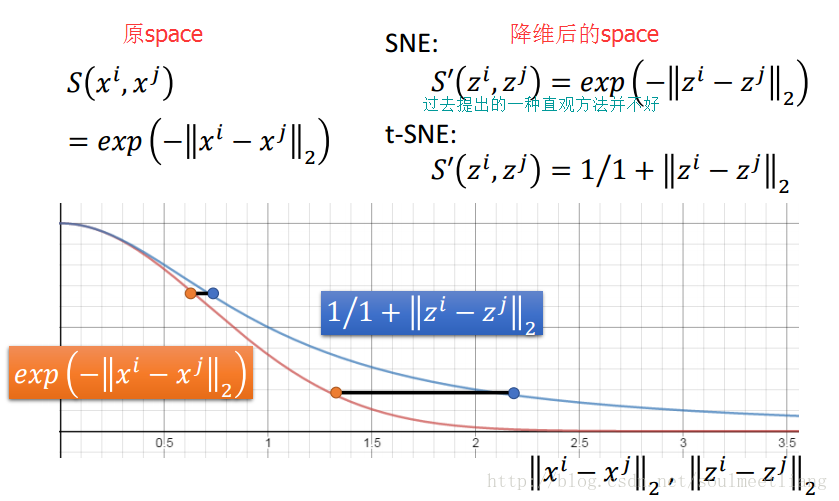
那么t-SNE是怎样计算的?
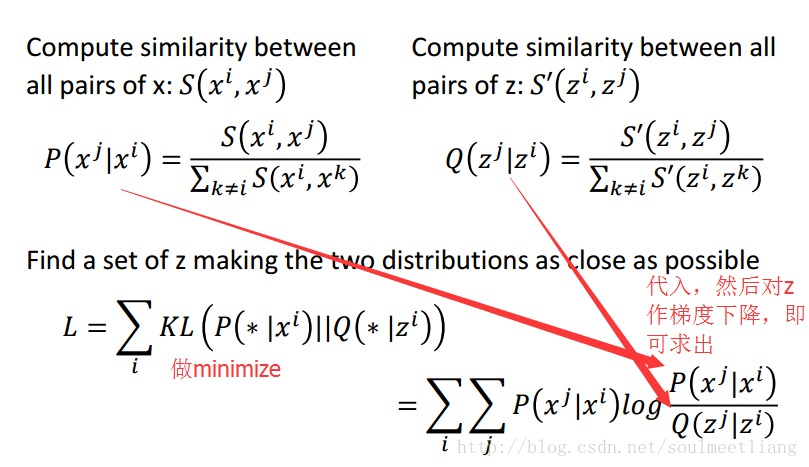
t-SNE similarity的神妙选择,从图中可以看出,使较远的data point距离被拉的更大。
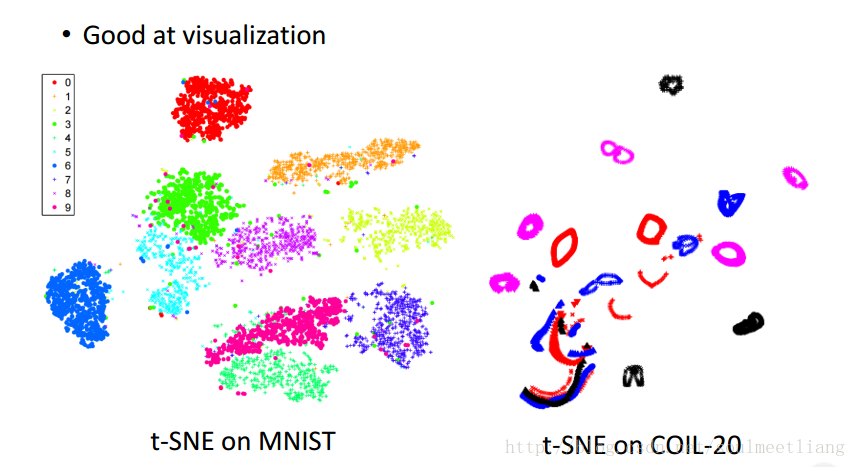
经典实例效果如图:
参考:
http://speech.ee.ntu.edu.tw/~tlkagk/courses/ML_2016/Lecture/tsne%20%28v2%29.pdf
https://blog.csdn.net/soulmeetliang/article/details/73441615