注:本文使用的网课资源为中国大学MOOC
https://www.icourse163.org/course/ZJU-93001
最小生成树问题
村村通中,修路用最少的边连通起来,这样更省钱。
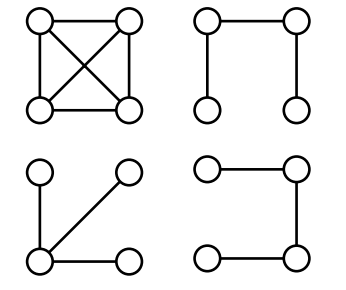
什么是最小生成树(minimum spanning tree)
1、是一个树
- 无回路
- |V|个顶点一定有|V|-1条边
2、是生成树
- 包含全部顶点
- |V|-1条边都在图里
- 向生成树中任意加一条边都构成回路
3、边的权重最小
4、最小生成树存在 (longleftrightarrow)图连通
贪心算法
什么是贪:每一步都要最好的
什么是“好”:权重最小的边
需要约束:
- 只能用图里有的边
- 只能正好用掉|V|-1条边
- 不能有回路
Prim算法——让一棵小树长大
算法描述:
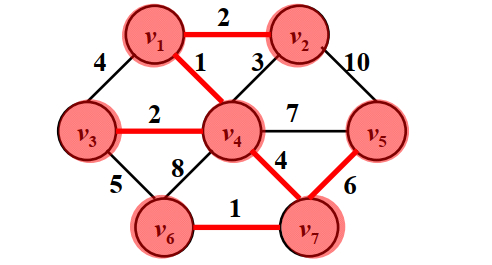
- 首先选择v1作为起始点,作为树,查找v1相关的边,选择其中权重最小的一条边,即<v1,v4>.
- 此时树长大了一点,有v1,v4两个顶点,继续查找与树相关的边,选择其中权重最小的边,此时有<v1,v2>,<v3,v4>可选,此时选择编号较小的v2加入树
- 此时树有v1,v4,v2三个顶点,继续查找与之相关,但是权重最小的边,由于<v2,v4>或者<v1,v4>连通后会产生回路,因此此时需要选择<v4,v7>
- 此时树中有v1,v4,v2,v3,v7,根据查找法则,选择<v6,v7>
- 此时树中有v1,v4,v2,v3,v7,v6,由于<v3,v6>连通后会产生回路,此时选择<v5,v7>
- 此时树的所有顶点均被收录,收录顺序为v1,v4,v2,v3,v7,v6,v5
伪代码
void Prim()
{
MST = {s};
while (1)
{
V = 未收录顶点中dist最小者;
if ( 这样的V不存在 )
break;
将V收录进MST: dist[V]=0;
for ( V的每一个邻接点W)
if ( dist[W] !=0 )
if ( E(v,w) < dist[W] )
{
dist[W] = E(V,W);
parent[W] = V;
}
}
if ( MST中收到顶点不到|V|个) // 剩下的顶点与树不相关,图不连通
Error( "生成树不存在");
}
注意
dist[V]应该初始化为E(s,V)或者无穷大
parent[V]=-1
时间复杂度是(T=O(V^2)),因此Prim算法更适用于稠密图
程序实现
#include <iostream>
#include <vector> /*调用动态数组*/
/***************************vector的常用操作*********************/
/* push_back(t) 在数组的最后添加一个值为t的数据
size() 当前使用数据的大小
pop_back(); // 弹出容器中最后一个元素(容器必须非空)
back(); // 返回容器中最后一个元素的引用 */
/***************************************************************/
using namespace std;
#define INF 100000
#define MaxVertex 105
typedef int Vertex;
/*****************************全局变量***************************/
int G[MaxVertex][MaxVertex]; //邻接矩阵
int parent[MaxVertex]; // 并查集
int dist[MaxVertex]; // 距离
int Nv; // 结点数
int Ne; // 边
int sum; // 权重和
vector<Vertex> MST; // 最小生成树
/*****************************函数声明****************************/
Vertex FindMin(void); // 查找未收录中dist最小的点
void Prim(Vertex s); // 以s为起点的prim算法
/****************************************************************/
/* 主函数 */
/****************************************************************/
int main()
{
Vertex v1, v2;
int weight;
sum = 0; // 权重和初始化为0
// 输入图的顶点数和边数,初始化图
cin >> Nv >> Ne;
for (int i = 1; i <= Nv; i++)
{
for (int j = 1; j <= Nv; j++)
G[i][j] = 0; // 初始化图
dist[i] = INF; // 初始化距离
parent[i] = -1; // 初始化并查集
}
// 初始化点
for (int i = 0; i < Ne; i++)
{
cin >> v1 >> v2 >> weight;
G[v1][v2] = weight;
G[v2][v1] = weight;
}
// 选择顶点1为源点, 运行prim算法
Prim(1);
// 输出算法运行结果
cout << "被收录顺序:" << endl;
for (int i = 0; i < Nv; i++)
cout << MST[i] << " ";
cout << "权重和为:" << sum << endl;
cout << "该生成树顶点为:" << endl;
// 因为顶点1为源点,这里直接从顶点2开始输出
for (Vertex i = 2; i <= Nv; i++)
cout << parent[i] << " ";
system("pause"); //程序暂停,显示按下任意键继续
return 0;
}
/*****************************函数定义****************************/
// 查找未收录中dist最小的点
Vertex FindMin()
{
int min = INF;
Vertex xb = -1;
// 在未被收录的结点中遍历
for (Vertex i = 1; i <= Nv; i++)
if (dist[i] && dist[i] < min) // dist=0代表已被收录
{
min = dist[i];
xb = i;
}
return xb;
}
// 以s为起点的prim算法
void Prim(Vertex s)
{
dist[s] = 0; // 将起点的dist赋值为0
MST.push_back(s); // 将起点s压入栈中
for (Vertex i = 1; i <= Nv; i++)
{
if ( G[s][i] ) // 遍历与s相关的边
{
dist[i] = G[s][i]; // dist由正无穷赋值为边权重
parent[i] = s; // parent赋值为s
}
}
while (1)
{
Vertex v = FindMin(); //查找未收录中dist最小的点
if (v == -1)
break;
sum += dist[v];
dist[v] = 0; // dist=0,可以视为将V收录进MST的标志
MST.push_back(v); // 将找到的最小权重顶点压入MST
for (Vertex w = 1; w <= Nv; w++) // 对于当前顶点的每个邻接点
if (G[v][w] && dist[w]) // 如果邻接点未被收录,也可判断是否会形成回路
if (G[v][w] < dist[w]) // 而且邻接点有边
{
dist[w] = G[v][w]; // 更新其邻接点dist为边的权重
parent[w] = v; // parent为该顶点
}
}
}
图示的测试数据
7 12
1 2 2
1 3 4
1 4 1
2 4 3
2 5 10
3 4 2
3 6 5
4 5 7
4 6 8
4 7 4
5 7 6
6 7 1
Kruskal算法,将森林合并成树
算法描述
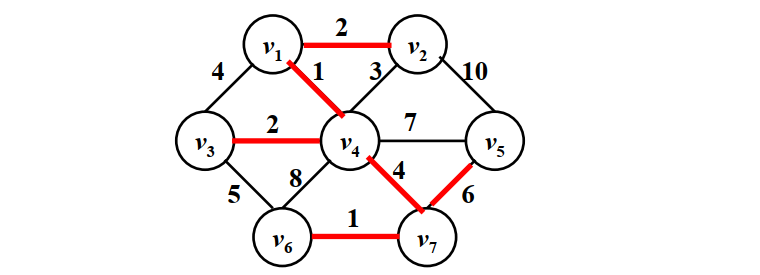
- 在初始情况下,认为每个顶点都是一棵树,每次找权重最小的边,然后通过找边,把所有的树都合并进来,直到所有的顶点都并成一棵树
- 首先收集的边是权重为1的<v1,v4>和<v6,v7>,此时包含4个顶点
- 然后收集权重为2的边<v3,v4>和<v1,v2>,此时包含v1,v4,v6,v7,v3,v2一共6个顶点
- 接下来由于权重为4的<v1,v3>和权重为5的边<v3,v6>连接后,会产生回路,因此收集权重为6的边<v7,v5>
- 此时已经收录了6条边,代表所有的顶点均已被收录
伪代码
void Kruskal ( Graph G )
{
MST = {};
while ( MST 中不到 |V| -1 条边 && E 中还有边 )
{
从E中取出一条权重最小的边E(v,w); // 可利用最小堆实现
将E(v,w)从E中删除;
if ( E(v,w)在MST中不构成回路 ) // 可利用并查集的查找实现
将E(v,w)加入MST;
else
彻底无视E(v,w);
}
if ( MST中不到|V|-1条边 ) // 等价于此图是不连通的
Error ("生成树不存在");
}
注意
Kruskal更适用于稀疏图,即边的条数较少差不多和顶点的数量是一个数量级
算法的时间复杂度(T=O(|E|log|E|))
程序实现
注: 测试样例与prim算法测试数据一致
#include <stdio.h>
#include <stdlib.h> //调用malloc()和free()
#include <WinDef.h>
#include <windows.h> //windows.h里定义了关于创建窗口,消息循环等函数S
/*****************************全局变量***************************/
#define MaxVertexNum 105
typedef int Vertex;
typedef Vertex SetName; /* 默认用根结点的下标作为集合名称 */
typedef int SetType[MaxVertexNum]; /* 假设集合元素下标从0开始 */
typedef int WeightType; /* 边的权值设为整型 */
/* 边的定义 */
typedef struct ENode *PtrToENode;
struct ENode
{
Vertex V1, V2; // 有向边<V1, V2> /
WeightType Weight; // 权重
};
typedef PtrToENode Edge;
SetType VSet; /* 结点数组 */
Edge ESet; /* 边数组 */
/*****************************函数声明****************************/
// 并查集相关函数
void InitializeVSet(int N); // 初始化并查集
void SetUnion(Vertex Root1, Vertex Root2); // 集合合并
Vertex Find(Vertex V); // 找到集合的根
int CheckCycle(Vertex V1, Vertex V2); // 检查连接V1和V2的边是否在现有的最小生成树子集中构成回路
// 最小堆相关函数
void MinHeap(int i, int M); // 将M个元素的数组中以ESet[i]为根的子堆调整为最小堆
void InitializeESet(int M); // 初始化最小堆
int GetEdge(int CurrentSize); // 给定当前堆的大小CurrentSize,将当前最小边位置弹出并调整堆
int Kruskal(int N, int M);
/****************************************************************/
/* 主函数 */
/****************************************************************/
int main()
{
int N, M, i;
scanf("%d %d", &N, &M);
if (M < N - 1) /* 太少边肯定不可能连通 */
printf("-1
");
else
{
ESet = (Edge)malloc(sizeof(struct ENode) * M);
for (i = 0; i < M; i++)
scanf("%d %d %d", &ESet[i].V1, &ESet[i].V2, &ESet[i].Weight);
printf("%d
", Kruskal(N, M));
}
system("pause"); //程序暂停,显示按下任意键继续
return 0;
}
/*****************************函数定义****************************/
/*---------- 结点并查集相关函数 ----------*/
void InitializeVSet(int N)
{ /* 并查集初始化 */
while (N)
VSet[N--] = -1;
}
/* 查找V所在的集合 */
Vertex Find(Vertex V)
{
Vertex root, trail, lead;
for (root = V; VSet[root] > 0; root = VSet[root])
; /* 查找V所在集合的根root */
for (trail = V; trail != root; trail = lead)
{
lead = VSet[trail];
VSet[trail] = root;
} /* 路径压缩 */
return root;
}
/*按规模求并,把小集合并入大集合 */
void SetUnion(Vertex Root1, Vertex Root2)
{
/* 这里保证Root1和Root2都是集合的根 */
if (VSet[Root2] < VSet[Root1])
{ /* 如果Root1比较大 */
VSet[Root2] += VSet[Root1]; /* Root1并入Root2 */
VSet[Root1] = Root2;
}
else
{ /* 如果Root2比较大 */
VSet[Root1] += VSet[Root2]; /* Root2并入Root1 */
VSet[Root2] = Root1;
}
}
/*------------------------------------------*/
/*----------- 边的最小堆相关函数 -----------*/
/* 将M个元素的数组中以ESet[i]为根的子堆调整为最小堆 */
void MinHeap(int i, int M)
{
int child;
struct ENode temp;
temp = ESet[i];
for (; ((i << 1) + 1) < M; i = child)
{
child = (i << 1) + 1;
if (child != M - 1 && ESet[child + 1].Weight < ESet[child].Weight)
child++;
if (temp.Weight > ESet[child].Weight)
ESet[i] = ESet[child];
else
break;
}
ESet[i] = temp;
}
/* 初始化最小堆 */
void InitializeESet(int M)
{
int i;
for (i = M / 2; i >= 0; i--)
MinHeap(i, M);
}
/* 给定当前堆的大小CurrentSize,将当前最小边位置弹出并调整堆 */
int GetEdge(int CurrentSize)
{
struct ENode temp;
/* 将最小边与当前堆的最后一个位置的边交换 */
temp = ESet[0];
ESet[0] = ESet[CurrentSize - 1];
ESet[CurrentSize - 1] = temp;
/* 将剩下的边继续调整成最小堆 */
MinHeap(0, CurrentSize - 1);
return CurrentSize - 1; /* 返回最小边所在位置 */
}
/*------------------------------------------*/
/* 检查连接V1和V2的边是否在现有的最小生成树子集中构成回路 */
int CheckCycle(Vertex V1, Vertex V2)
{
Vertex Root1 = Find(V1); /* 得到V1所属的连通集名称 */
Vertex Root2 = Find(V2); /* 得到V2所属的连通集名称 */
if (Root1 == Root2) /* 若V1和V2已经连通,则该边不能要,返回0 */
return 0;
else
{ /* 否则该边可以被收集,同时将V1和V2并入同一连通集 */
SetUnion(Root1, Root2);
return 1;
}
}
/* 给定结点和边的数目,返回最小生成树总权重 */
int Kruskal(int N, int M)
{
int EdgeN = 0; /* 生成树边集合计数器 */
int Cost = 0; /* 最小生成树权重累计 */
int NextEdge = M; /* 下一个最小权重边的位置,初始化为总边数 */
InitializeVSet(N); /* 初始化结点并查集VSet */
InitializeESet(M); /* 根据边的权重建立最小堆ESet */
while (EdgeN < N - 1)
{ /* 当收集的边不足以构成树时 */
if (NextEdge <= 0) /* 边集已空 */
break;
NextEdge = GetEdge(NextEdge); /* 从边集中得到最小边的位置 */
if (CheckCycle(ESet[NextEdge].V1, ESet[NextEdge].V2))
{
/* 如果该边的加入不构成回路,即两端结点不属于同一连通集 */
Cost += ESet[NextEdge].Weight; /* 收入该边,累计权重 */
EdgeN++; /* 生成树中边数加1 */
}
}
if (EdgeN < N - 1)
Cost = -1; /* 若收集的边不足以构成树,设置信号 */
return Cost;
}
拓扑排序
-
拓扑序:如果途中从v到w有一条有向路径,则v一定排在w之前,满足此条件的顶点序列成为一个拓扑序
-
获得一个拓扑序的过程就是拓扑排序
-
网络(AOV)如果有合理的拓扑序,则必定是有向无环图(Direceted Acyclic Graph, DAG)
算法描述
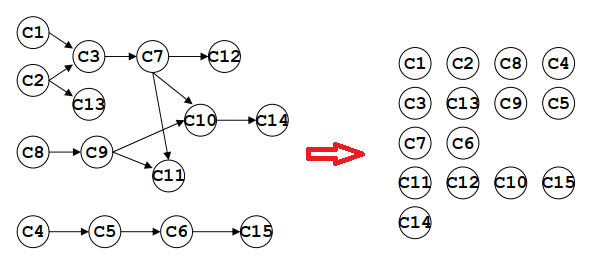
如上图图所示,图中的顶点代表活动,图中的有向边代表活动的先后关系;通过拓扑排序,可以将左侧图以右侧的表示的顺序输出。
- 首先将每个点的度进行存储;
- 遍历其中度为0的点,并入队,然后删除所有去该顶点的边
- 开始弹出队列,并且遍历该点的邻接点,判断是否入度为0,若为0,则将邻接点入队
- 如此循环,直到每个点都弹出队列
伪代码
void TopSort()
{
for ( 图中每一个顶点V )
if ( Indegree[V]==0 )
Enqueue(V,Q)
while ( !IsEmpty(Q) )
{
V = Dequeue( Q );
输出V,或者记录V的输出序号;
cnt++;
for ( V的每个邻接点W)
if ( --Indegree[W]==0 )
Enqueue( W,Q );
}
if ( cnt != |V| )
Error("图中有回路")
}
注意
- 此算法可以用来检测有向图是否DAG
- 算法的时间复杂度(T=O(|V|+|E|))
- 排序并不是唯一的,可能存在是并列关系而不在同一集合的点。
程序实现
/* 邻接表存储 - 拓扑排序算法 */
#include <iostream> /* 引入命名空间,以及模块化I/O */
#include <queue> /* 引用队列,常用函数有empty,push,front,back,pop,size */
#include <stdio.h>
#include <stdlib.h>
using namespace std;
/*****************************全局变量***************************/
#define MaxVertexNum 105
typedef int Vertex;
typedef Vertex SetName; /* 默认用根结点的下标作为集合名称 */
typedef int SetType[MaxVertexNum]; /* 假设集合元素下标从0开始 */
typedef int WeightType; /* 边的权值设为整型 */
/* 边的定义 */
typedef struct ENode *PtrToENode;
struct ENode
{
Vertex V1, V2; // 有向边<V1, V2>
WeightType Weight; // 权重
};
typedef PtrToENode Edge;
/* 邻接点的定义 */
typedef struct AdjVNode *PtrToAdjVNode;
struct AdjVNode
{
Vertex AdjV; // 邻接点下标
WeightType Weight; // 权重
PtrToAdjVNode Next; // 指向下一个邻接点的指针
};
/* 顶点表头结点的定义 */
typedef struct Vnode
{
PtrToAdjVNode FirstEdge; /* 边表头指针 */
} AdjList[MaxVertexNum]; /* AdjList是邻接表类型 */
/* 图结点的定义 */
typedef struct GNode *PtrToGNode;
struct GNode
{
int Nv; // 顶点数
int Ne; // 边数
AdjList G; // 邻接表
};
typedef PtrToGNode LGraph; /* 以邻接表方式存储的图类型 */
/*****************************函数声明****************************/
LGraph CreateGraph(int VertexNum); // 初始化一个有VertexNum个顶点但没有边的图
void InsertEdge(LGraph Graph, Edge E); // 插入边
void printG(LGraph Graph); // 打印图
bool TopSort(LGraph Graph, Vertex TopOrder[]); //拓扑排序
/****************************************************************/
/* 主函数 */
/****************************************************************/
int main()
{
LGraph ListGraph;
Vertex TopOrder[MaxVertexNum];
Edge E;
Vertex V;
int Nv, i;
// 读入顶点个数
scanf("%d", &Nv);
ListGraph = CreateGraph(Nv); // 初始化有Nv个顶点但没有边的图
// 读入边数
scanf("%d", &(ListGraph->Ne));
if (ListGraph->Ne != 0)
{
/* 如果有边 */
E = (Edge)malloc(sizeof(struct ENode)); // 建立边结点
/* 读入边,格式为"起点 终点 权重",插入邻接表 */
for (i = 0; i < ListGraph->Ne; i++)
{
scanf("%d %d %d", &E->V1, &E->V2, &E->Weight);
/* 注意:如果权重不是整型,Weight的读入格式要改 */
InsertEdge(ListGraph, E);
}
}
// 打印邻接表
printG(ListGraph);
// 拓扑排序,并输出拓扑序
if ( TopSort(ListGraph, TopOrder) )
{
printf("topSort is : ");
for (i = 0; i < Nv; i++)
printf("%d ", TopOrder[i]);
printf("
");
}
system("pause"); //程序暂停,显示按下任意键继续
return 0;
}
/* 初始化一个有VertexNum个顶点但没有边的图 */
LGraph CreateGraph(int VertexNum)
{
Vertex V, W;
LGraph Graph;
Graph = (LGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
/* 注意:这里默认顶点编号从1开始,到(Graph->Nv) */
for (V = 1; V <= Graph->Nv; V++)
Graph->G[V].FirstEdge = NULL;
return Graph;
}
/* 向LGraph中插入边 */
void InsertEdge(LGraph Graph, Edge E)
{
PtrToAdjVNode NewNode;
/***************** 插入边 <V1, V2> ****************/
/* 为V2建立新的邻接点 */
NewNode = (PtrToAdjVNode)malloc(sizeof(struct AdjVNode));
NewNode->AdjV = E->V2;
NewNode->Weight = E->Weight;
/* 将V2插入V1的表头 */
NewNode->Next = Graph->G[E->V1].FirstEdge;
Graph->G[E->V1].FirstEdge = NewNode;
/********** 若是无向图,还要插入边 <V2, V1> **********/
/* 为V1建立新的邻接点 */
//NewNode = (PtrToAdjVNode)malloc(sizeof(struct AdjVNode));
//NewNode->AdjV = E->V1;
//NewNode->Weight = E->Weight;
/* 将V1插入V2的表头 */
//NewNode->Next = Graph->G[E->V2].FirstEdge;
//Graph->G[E->V2].FirstEdge = NewNode;
}
// 打印
void printG(LGraph Graph)
{
Vertex v;
PtrToAdjVNode tmp;
printf("Lgraph output:
");
for (v = 1; v <= Graph->Nv; v++)
{
tmp = Graph->G[v].FirstEdge;
printf("%d ", v);
while (tmp)
{
printf("->%d ", tmp->AdjV);
tmp = tmp->Next;
}
printf("
");
}
}
/* 对Graph进行拓扑排序, TopOrder[]顺序存储排序后的顶点下标 */
bool TopSort(LGraph Graph, Vertex TopOrder[])
{
int Indegree[MaxVertexNum], cnt;
Vertex V;
PtrToAdjVNode W;
queue<int> Q; // 定义队列Q
//Queue Q = CreateQueue(Graph->Nv);
/* 初始化Indegree[] */
for (V = 1; V <= Graph->Nv; V++)
Indegree[V] = 0;
/* 遍历图,得到Indegree[] */
for (V = 1; V <= Graph->Nv; V++)
for (W = Graph->G[V].FirstEdge; W; W = W->Next)
Indegree[W->AdjV]++; /* 对有向边<V, W->AdjV>累计终点的入度 */
/* 将所有入度为0的顶点入列 */
for (V = 1; V <= Graph->Nv; V++)
if (Indegree[V] == 0)
Q.push(V);
//AddQ(Q, V);
/* 下面进入拓扑排序 */
cnt = 0;
while ( !Q.empty() )
{
//V = DeleteQ(Q); /* 弹出一个入度为0的顶点 */
V = Q.front();
Q.pop();
TopOrder[cnt++] = V; /* 将之存为结果序列的下一个元素 */
/* 对V的每个邻接点W->AdjV */
for (W = Graph->G[V].FirstEdge; W; W = W->Next)
if (--Indegree[W->AdjV] == 0) /* 若删除V使得W->AdjV入度为0 */
Q.push(W->AdjV);
//AddQ(Q, W->AdjV); /* 则该顶点入列 */
}/* while结束*/
if (cnt != Graph->Nv)
return false; /* 说明图中有回路, 返回不成功标志 */
else
return true;
}
图示的测试样例
15 14
1 3 1
2 3 1
2 13 1
8 9 1
4 5 1
3 7 1
9 10 1
9 11 1
5 6 1
7 10 1
7 11 1
7 12 1
6 15 1
10 14 1
关键路径问题
- 由绝对不允许延误的活动组成的路径,一般取决于信号所经过的延时最大路径
- AOE(activity on edge)网络:一般用于安排项目的工序
- 可以解决的问题
- 所用时长最短的方案
- 机动时间是哪几个工序
- 所用时长最长的方案
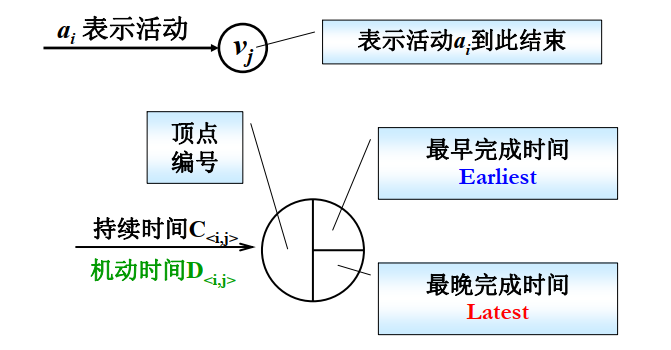
- 假设开始点是v1, 从v1到vi的最长路径长度叫做事件vi的最早发生时间
- 这里用Earlist[i]表示事件a[i]开始的最早时间,Latest[i]为该事件开始的最晚时间
- 而关键路径就是那些没有机动时间的边组成的路径
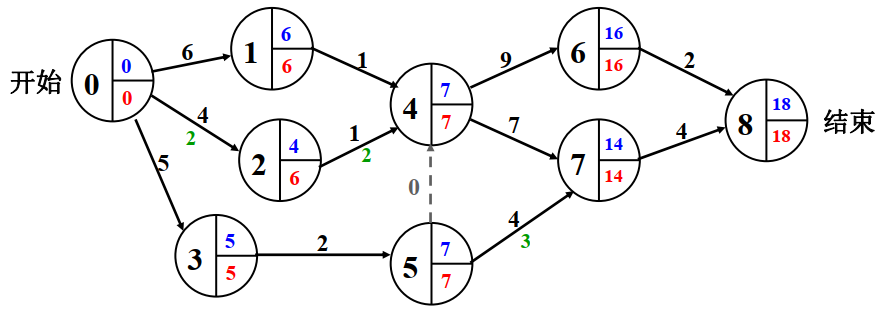
算法描述
- 以活动0为起始点(入度为0的点),到活动1的距离为C<0,1>=6,因此Earlist[1]=6,同理可得Earlist[2]=4,Earlist[3]=5,Earlist[5]=7
- 对于活动4,同时受活动1,2的影响,但是需要等到活动1完成,再加上C<1,4>才能得到最早完成时间Earlist[4] = max{Earlist[1]+C<1,4>, Earlist[2]+C<2,4>, Earlist[5]+C<5,4>}。
- 同理可得Earlist[6]=16,Earlist[7]=14,Earlist[8]=18
- 从最后一个活动(出度为0的点)往回推可以得到Latest的值,此时Latest[8]=Earlist[8]=18
- 而活动6,7由于回推只与活动8有关,Latest[6]=16,Latest[7]=14
- 对于活动4,其同时影响活动6和活动7,因此对其最晚活动时间Latest[4]=min{Latest[6]-C<6,4>, Latest[7]-C<7,4>},同理Latest[5]=min{Latest[4]-C<4,5>, Latest[7]-C<7,5>}
- 同理可以得到Latest[1]=6,Latest[2]=6, Latest[3]=5,Latest[0]=0
- 最后机动时间取决于两个活动之间最晚完成与最早完成时间的差值
公式总结
- (Earliest[j] = max_{<i,j> in E}{ Earliest[i] + C_{<i,j>}})
- (Latest[j] = min_{<i,j> in E}{ Latestest[i] - C_{<i,j>}})
- (D_{<i,j>}=Latest[j]-Earliest[i]-C_{<i,j>})
程序实现
/* 邻接表存储 - 关键路径算法 */
#include <iostream> /* 引入命名空间,以及模块化I/O */
#include <queue> /* 引用队列,常用函数有empty,push,front,back,pop,size */
#include <stdio.h>
#include <stdlib.h>
using namespace std;
/*****************************全局变量***************************/
#define MaxVertexNum 105
typedef int Vertex;
typedef Vertex SetName; /* 默认用根结点的下标作为集合名称 */
typedef int SetType[MaxVertexNum]; /* 假设集合元素下标从0开始 */
typedef int WeightType; /* 边的权值设为整型 */
// 全局数组存储拓扑序
Vertex TopOrder[MaxVertexNum];
/* 边的定义 */
typedef struct ENode *PtrToENode;
struct ENode
{
Vertex V1, V2; // 有向边<V1, V2>
WeightType Weight; // 权重
};
typedef PtrToENode Edge;
/* 邻接点的定义 */
typedef struct AdjVNode *PtrToAdjVNode;
struct AdjVNode
{
Vertex AdjV; // 邻接点下标
WeightType Weight; // 权重
PtrToAdjVNode Next; // 指向下一个邻接点的指针
};
/* 顶点表头结点的定义 */
typedef struct Vnode
{
PtrToAdjVNode FirstEdge; /* 边表头指针 */
} AdjList[MaxVertexNum]; /* AdjList是邻接表类型 */
/* 图结点的定义 */
typedef struct GNode *PtrToGNode;
struct GNode
{
int Nv; // 顶点数
int Ne; // 边数
AdjList G; // 邻接表
};
typedef PtrToGNode LGraph; /* 以邻接表方式存储的图类型 */
/*****************************函数声明****************************/
LGraph CreateGraph(int VertexNum); // 初始化一个有VertexNum个顶点但没有边的图
void InsertEdge(LGraph Graph, Edge E); // 插入边
void printG(LGraph Graph); // 打印图
bool TopSort(LGraph Graph, int *pEtv); // 拓扑排序
void CriticalPath(LGraph Graph, int *pEtv, int *pLtv); // 求关键路径
/****************************************************************/
/* 主函数 */
/****************************************************************/
int main()
{
LGraph ListGraph;
Vertex *TopOrdered = new Vertex[MaxVertexNum]; // 拓扑序存储数组
int *pEtv = new int[MaxVertexNum]; // 最早完成时间的存储数组
int *pLtv = new int[MaxVertexNum]; // 最晚完成时间的存储数组
Edge E;
Vertex V;
int Nv, i;
// 读入顶点个数
scanf("%d", &Nv);
ListGraph = CreateGraph(Nv); // 初始化有Nv个顶点但没有边的图
// 读入边数
scanf("%d", &(ListGraph->Ne));
if (ListGraph->Ne != 0)
{
/* 如果有边 */
E = (Edge)malloc(sizeof(struct ENode)); // 建立边结点
/* 读入边,格式为"起点 终点 权重",插入邻接表 */
for (i = 0; i < ListGraph->Ne; i++)
{
scanf("%d %d %d", &E->V1, &E->V2, &E->Weight);
/* 注意:如果权重不是整型,Weight的读入格式要改 */
InsertEdge(ListGraph, E);
}
}
// 打印邻接表
printG(ListGraph);
// 拓扑排序,并输出拓扑序
if ( TopSort(ListGraph, pEtv) )
{
printf("topSort is :");
// 1、打印拓扑序
for (i = 0; i < Nv; i++)
printf(" %d", TopOrder[i]);
printf("
");
// 2、打印最早完成时间
printf("Earilest time is :");
for (i = 0; i < Nv; i++)
printf(" %d", pEtv[i]);
printf("
");
// 求关键路径
printf("Non-emergency is :");
CriticalPath(ListGraph, pEtv, pLtv);
}
system("pause"); //程序暂停,显示按下任意键继续
return 0;
}
/* 初始化一个有VertexNum个顶点但没有边的图 */
LGraph CreateGraph(int VertexNum)
{
Vertex V, W;
LGraph Graph;
Graph = (LGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
/* 注意:这里默认顶点编号从0开始,到(Graph->Nv-1) */
for (V = 0; V < Graph->Nv; V++)
Graph->G[V].FirstEdge = NULL;
return Graph;
}
/* 向LGraph中插入边 */
void InsertEdge(LGraph Graph, Edge E)
{
PtrToAdjVNode NewNode;
/***************** 插入边 <V1, V2> ****************/
/* 为V2建立新的邻接点 */
NewNode = (PtrToAdjVNode)malloc(sizeof(struct AdjVNode));
NewNode->AdjV = E->V2;
NewNode->Weight = E->Weight;
/* 将V2插入V1的表头 */
NewNode->Next = Graph->G[E->V1].FirstEdge;
Graph->G[E->V1].FirstEdge = NewNode;
/********** 若是无向图,还要插入边 <V2, V1> **********/
/* 为V1建立新的邻接点 */
//NewNode = (PtrToAdjVNode)malloc(sizeof(struct AdjVNode));
//NewNode->AdjV = E->V1;
//NewNode->Weight = E->Weight;
/* 将V1插入V2的表头 */
//NewNode->Next = Graph->G[E->V2].FirstEdge;
//Graph->G[E->V2].FirstEdge = NewNode;
}
// 打印
void printG(LGraph Graph)
{
Vertex v;
PtrToAdjVNode tmp;
printf("Lgraph output:
");
for (v = 0; v < Graph->Nv; v++)
{
tmp = Graph->G[v].FirstEdge;
printf("%d ", v);
while (tmp)
{
printf("->%d ", tmp->AdjV);
tmp = tmp->Next;
}
printf("
");
}
}
/* 对Graph进行拓扑排序, TopOrder顺序存储排序后的顶点下标, pEtv存储最早完成时间 */
bool TopSort(LGraph Graph, int *pEtv)
{
int Indegree[MaxVertexNum], cnt;
Vertex V;
PtrToAdjVNode W;
queue<int> Q; // 定义队列Q
/* 初始化Indegree[]和pEtv */
for (V = 0; V < Graph->Nv; V++)
{
Indegree[V] = 0;
pEtv[V] = 0;
}
/* 遍历图,得到Indegree[] */
for (V = 0; V < Graph->Nv; V++)
for (W = Graph->G[V].FirstEdge; W; W = W->Next)
Indegree[W->AdjV]++; /* 对有向边<V, W->AdjV>累计终点的入度 */
/* 将所有入度为0的顶点入列 */
for (V = 0; V < Graph->Nv; V++)
if (Indegree[V] == 0)
Q.push(V);
/* 下面进入拓扑排序 */
cnt = 0;
while (!Q.empty())
{
V = Q.front();
Q.pop(); /* 弹出一个入度为0的顶点 */
TopOrder[cnt++] = V; /* 将之存为结果序列的下一个元素 */
/* 对V的每个邻接点W->AdjV */
for (W = Graph->G[V].FirstEdge; W; W = W->Next)
{
if (--Indegree[W->AdjV] == 0) /* 若删除V使得W->AdjV入度为0 */
Q.push(W->AdjV); /* 则该顶点入列 */
if (pEtv[V] + W->Weight > pEtv[W->AdjV])
// pEtv[W] = max(取V的临边权重 + pEtv[V]);
pEtv[W->AdjV] = pEtv[V] + W->Weight;
}
} /* while结束*/
if (cnt != Graph->Nv)
return false; /* 说明图中有回路, 返回不成功标志 */
else
return true;
}
// 关键路径
void CriticalPath(LGraph Graph, int *pEtv, int *pLtv)
{
// pEtv 事件最早发生时间
// PLtv 事件最迟发生时间
Vertex V, K;
PtrToAdjVNode W = NULL;
int ete = 0, lte = 0; // 声明活动最早发生时间和最迟发生时间变量
// pLtv初始化
for (V = 0; V < Graph->Nv; V++)
{
pLtv[V] = pEtv[Graph->Nv -1];
}
// 逆向求出各顶点的最晚完成时间
for (V = 0; V < Graph->Nv; V++)
{
K = TopOrder[Graph->Nv - 1 - V]; // 拓扑序逆向输出顶点序号
for (W = Graph->G[K].FirstEdge; W; W = W->Next) // 遍历其邻接点
{
if (pLtv[W->AdjV] - W->Weight < pLtv[K])
// // pLtv[W] = min(取V的临边权重 + pEtv[V]);
pLtv[K] = pLtv[W->AdjV] - W->Weight;
}
}
// 求 ete, lte, 和关键路径
for (V = 0; V < Graph->Nv; V++)
{
W = Graph->G[V].FirstEdge; // 遍历V顶点的邻接点
while (W != NULL)
{
ete = pEtv[V]; // 活动最早发生时间
lte = pLtv[W->AdjV] - W->Weight; // 活动最迟发生时间
if (ete != lte)
printf(" <%d,%d>", V, W->AdjV);
W = W->Next;
}
}
printf("
");
}
图示的测试样例
9 12
0 1 6
0 2 4
0 3 5
1 4 1
2 4 1
3 5 2
5 4 0
4 6 9
4 7 7
5 7 4
6 8 2
7 8 4