1.控制的概念
模糊控制属于控制技术的一种,先来看控制的基本概念。
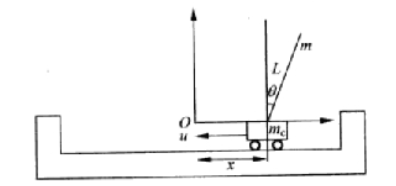
例如一个倒立摆系统:桌面上一个运动的小车,上面搭载一个摆杆。
该系统控制的意图在于:通过控制小车的移动速度u,满足倒立摆在一定角度或者一定的角速度范围内运动。
在这个过程中,控制量是小车的移动速度u,观测量是摆杆的角度θ或者摆杆的角速度。
普通的控制手段是通过系统数学建模,以严格的动态分析得到相应的系统参数,以达到控制目的。而模糊控制的不同就在于“模糊”的控制。
2.“模糊”的控制
仍然以上面倒立摆为例、我们关心的参数是控制量u,观测量角度θ或者摆杆的角速度,最终想要知道移动速度u为某一具体值时,摆杆的角度或者角度值的相应值是多少。
在模糊控制里,控制过程不用这些具体的值,而是把具体的值转化为模糊值。比如倒立摆系统中如果只考虑摆杆的角度,那么θ可以从-90°~+90°变化(以中间的法线为0°),就需要定义一个模糊、集合:正偏转、负偏转零偏转;并相应地将角度值归入这些集合里,例如±60~±90°属于偏转较大。
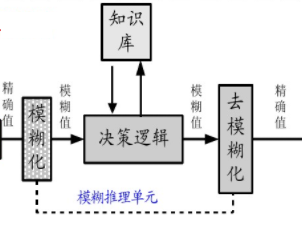
同样,对控制器的输入量、输出量都做同样的处理——真实值变为模糊值,这个过程就是模糊化的过程,就可以把我们需要的真实值转化为模糊值进行模糊地控制了。
转换为模糊值后,我们需要考虑如何控制的问题。模糊控制是基于专家知识或手动操作人员长期积累的经验,按人的直觉推理的一种语言表示形式,形象的称为知识库。比如在倒立摆系统中,按我们的认知,如图中当小车向左运动过程中摆杆向右侧倾倒,属于正偏转,我们的做法是让小车速度减慢或直接改变方向向右运动,即可使摆杆保持在一定的角度范围内。
这句话就是“模糊”控制含义的精髓。这句话是我说的,计算机肯定不理解,所以需要用某个规则让计算机理解。该规则通常有一系列的关系词连接而成,如if-then、else、also、end、or等,关系词必须经过“翻译”才能将模糊规则数值化。最常用的关系词为if-then、also,对于多变量模糊控制系统,还有and等。
在这个例子中,列举其中一条语句就是:如果角度为正偏转,则运动速度u为负最大值。将其中的正偏转、负最大值转换为函数关系,也就是临界值的隶属函数。知识库就包含隶属函数和模糊规则、
根据隶属函数设计好程序,运行结果,便得到了对应观测量,控制量的模糊值变动范围。这个过程根据输入模糊量,由模糊控制规则完成模糊推理来求解模糊关系方程,并获得模糊控制量的功能部分。最基本的有Zadeh近似推理,它包含有正向推理和逆向推理两类。正向推理常被用于模糊控制中,而逆向推理一般用于知识工程学领域的专家系统中。推理结果的获得,表示模糊控制的规则推理功能已经完成。
模糊控制的最后,就是将得到的模糊值还原为真实值。——解模糊化接口。
以上过程如图所示