CMU 2005年 DARPA 比赛技术报告 : Red Team
1. Abstract:
车辆特点包括:
1. 板载多传感器与预规划信息融合(这里的预规划信息可能是指RDDF?);
2. 传感器指向稳固,便于辅助环境建模以及高速行驶状态下的转弯壁障;
3. drive-by topography for pre-mapping terrain (这是什么鬼,没看懂);
这几项技术,与位姿估计,路标点估计,路径规划等共同辅助车辆行驶。
2. 车辆描述:
DARPA比赛环境特点导致各队伍选择适合越野的SUV,RT也不例外。RT对车辆进行了一些改装,其中在重要电子模块周围假装了多个减震器,作用除了保护电子模块,计算模块外,还包括平滑trajectory。
3. 传感器与计算单元:
传感器与SRT相似,都包括RADAR,LIDAR,但是好像没说明是否包括相机.
包括DSP,FPGA,ASIC,以及PC等。
有意思的是包括了一个Vehicle Health Management系统,可以检测车辆状态。
若有特殊状态,例如车辆初始化未成功,则重启进程; 同时系统可以通过周期性的TCP/IP来检测各pc的状态。
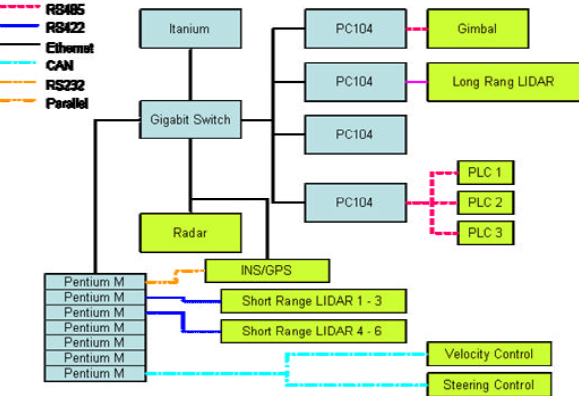
4. 系统架构:
5. 定位与感知
车辆通过IMU以及GPS来估计6DOF位姿,速度以及加速度,使用到了卡尔曼滤波。
INS/GPS系统,又被成为 惯性导航/GPS组合导航系统(具体了解https://wenku.baidu.com/view/325000050740be1e650e9a5d.html),总而言之就是INS可以提供连续的位姿估计,但是有积累误差,GPS可以提供高精度位置估计,但是没有位姿估计,且容易丢失信号,
两者融合可以作为有效互补。
传感器用到了长短距离LIDAR以及RADAR。LIDAR通过云台固定以提高地图可信度。

比赛前提供的RDDF粗糙地图与LIDAR,RADAR实时环境地图信息融合。
路径规划采用 A-star algorithm;算法会考虑多种可能的路径并通过比较least cost to goal来决定路径。
车辆控制同样使用PID,进行过simulink仿真,之后将simulink模型编成C语言格式直接写入控制器。
对于坐标系来说,同样使用的UTM。