恒定加速度Kalman模型
1. scenario:我们想用卡尔曼滤波来追踪3D空间中某个具有恒定加速度的物体,我们有一个位置传感器可以用来观测物体位置,我们想得到物体的3D位置以及速度。
2. Description :
假设物体状态由六维vector定义如下:

系统的预测方程为:
![]()
假设我们没有控制输入,那么预测方程可以表示如下:
y = Hx
因为我们有位置传感器,不管是视觉,激光还是雷达,我们可以得到物体在3D空间中的位置,即(x,y,z),那么系统的观测方程可以用如下表示:

接下来我们定义初始状态的协方差矩阵为9x9的单位矩:

接下来定义系统的状态转移矩阵A,若定义状态间的time step为 dt = 1,则此时的A矩阵为:

定义系统的初始观测协方差矩阵为3x3的对角阵:
![]()
:系统的加速度扰动 ,那么Q可以用如下表示:![]()
![]()
![]()
3. Implementation :
这里省略了一些细节,具体代码请查看我的github主页:https://github.com/Doodleshr
P = 100.0*np.eye(9) #define dt = 0.05 rather than dt = 1 dt = 0.05
#define H and A according to what we have discused
......
###
#define observation noise covariance R = 100*np.eye(3) #define process noise matrix Q #from the blog we mentioned how to compute Q from G G = ... a = 0.1 Q = G*G.T*a**2
#system initialization px=0.0 py=0.0 pz=0.0 vx=1 vy=2 vz=3 Xr=[] Yr=[] Zr=[] # #generate position: for i in range(100): # we assume constant acceleratoin for this demo accx = 3 vx += accx * dt px += vx * dt accy = 1 vy += accy * dt py += vy * dt accz = 1 vz += accz * dt pz += vz * dt Xr.append(px) Yr.append(py) Zr.append(pz) # position noise sp = 0.5 Xm = Xr + sp * (np.random.randn(100)) Ym = Yr + sp * (np.random.randn(100)) Zm = Zr + sp * (np.random.randn(100)) #stack measurements measurements = np.vstack((Xm,Ym,Zm)) #define initial state X = np.matrix([0.0, 0.0, 0.0, 1.0, 2.0, 3.0, 3.0, 1.0, 1.0]).T I = np.eye(9) Xx = [] Xy = [] Xz = [] for each_step in range(100): #prediction step: X = A*X #state covariance propogation P = A*P*A.T + Q #measurement covariance propogation S = H*P*H.T + R #Kalman Gain update K = (P*H.T) * np.linalg.pinv(S) # print(K) Z = measurements[:,each_step].reshape(3,1) #corrected/updated x X = X + K*(Z-(H*X)) #update state covariance P: P = (I - (K * H)) * P #store corrected/updated x Xx.append(float(X[0])) Xy.append(float(X[1])) Xz.append(float(X[2]))
4. Result:
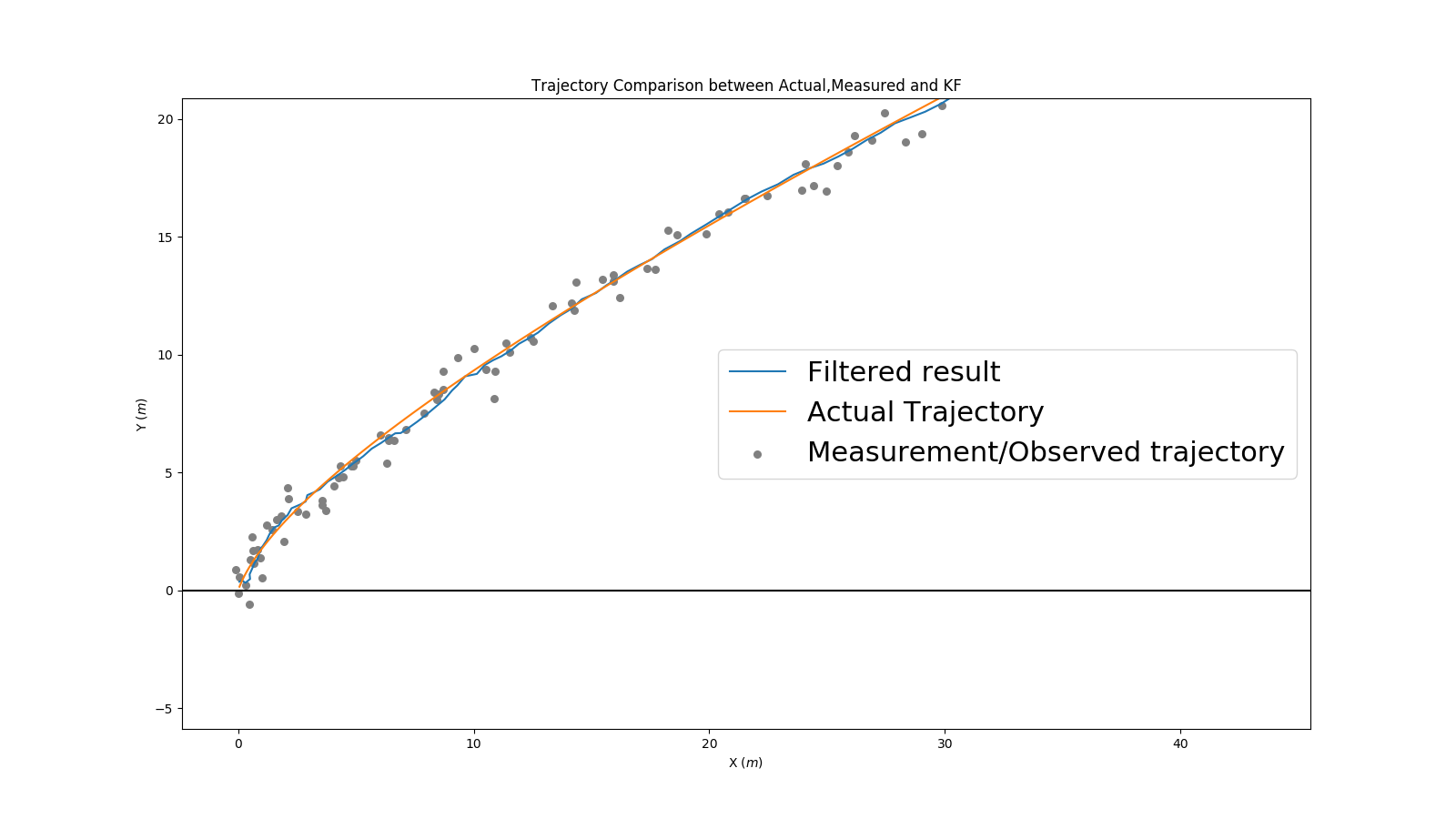
我们可以看到观测值是很noisy的,但是使用卡尔曼滤波后,轨迹变得平滑许多,也更加贴合实际轨迹,可见卡尔曼滤波是是有效的。