https://blog.csdn.net/weixin_38203573/article/details/79787499
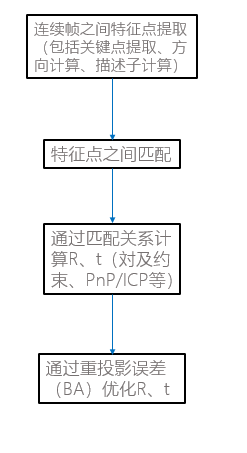
特征点法:
通过特征点匹配来跟踪点,计算几何关系得到R,t,BA来优化R,t,流程大致如下:
直接法:
直接法是从光流法演变而来的,是基于灰度不变假设,计算最小光度误差来优化R,t,流程大致如下:

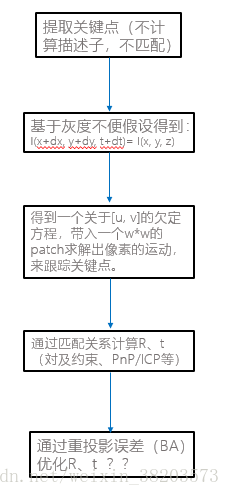
光流法:
基于灰度不变假设,把特征点法中的描述子和匹配换成了光流跟踪,之后求解R,t的过程是一样的,流程大致如下:
那么这三种方法的优缺点各是什么呢,近期在学了视觉slam后做了初步的总结,希望大家批评指正。
PS.大多数情况下一种方法的有点即使另外一种方法的缺点,所以在一下没有提到的优缺点可以从其他方法的优缺点中获取。


由于直接法是光流法的衍生,所以他们有很多的相似性。
有不正确的地方希望大家指出,谢谢!
原文链接:https://blog.csdn.net/weixin_38203573/article/details/79787499