copy from : http://gityuan.com/2016/10/29/binder-thread-pool/
基于Android 6.0源码剖析,分析Binder线程池以及binder线程启动过程。
frameworks/base/cmds/app_process/app_main.cpp
frameworks/native/libs/binder/ProcessState.cpp
framework/native/libs/binder/IPCThreadState.cpp
kernel/drivers/staging/android/binder.c
一. 概述
Android系统启动完成后,ActivityManager, PackageManager等各大服务都运行在system_server进程,app应用需要使用系统服务都是通过binder来完成进程之间的通信,上篇文章彻底理解Android Binder通信架构,从整体架构以及通信协议的角度来阐述了Binder架构。那对于binder线程是如何管理的呢,又是如何创建的呢?其实无论是system_server进程,还是app进程,都是在进程fork完成后,便会在新进程中执行onZygoteInit()的过程中,启动binder线程池。接下来,就以此为起点展开从线程的视角来看看binder的世界。
二. Binder线程创建
Binder线程创建与其所在进程的创建中产生,Java层进程的创建都是通过Process.start()方法,向Zygote进程发出创建进程的socket消息,Zygote收到消息后会调用Zygote.forkAndSpecialize()来fork出新进程,在新进程中会调用到RuntimeInit.nativeZygoteInit方法,该方法经过jni映射,最终会调用到app_main.cpp中的onZygoteInit,那么接下来从这个方法说起。
2.1 onZygoteInit
[-> app_main.cpp]
virtual void onZygoteInit() {
//获取ProcessState对象
sp<ProcessState> proc = ProcessState::self();
//启动新binder线程 【见小节2.2】
proc->startThreadPool();
}
ProcessState::self()是单例模式,主要工作是调用open()打开/dev/binder驱动设备,再利用mmap()映射内核的地址空间,将Binder驱动的fd赋值ProcessState对象中的变量mDriverFD,用于交互操作。startThreadPool()是创建一个新的binder线程,不断进行talkWithDriver()。 详细过程,见注册服务的[小节二].
2.2 PS.startThreadPool
[-> ProcessState.cpp]
void ProcessState::startThreadPool()
{
AutoMutex _l(mLock); //多线程同步
if (!mThreadPoolStarted) {
mThreadPoolStarted = true;
spawnPooledThread(true); 【见小节2.3】
}
}
启动Binder线程池后, 则设置mThreadPoolStarted=true. 通过变量mThreadPoolStarted来保证每个应用进程只允许启动一个binder线程池, 且本次创建的是binder主线程(isMain=true). 其余binder线程池中的线程都是由Binder驱动来控制创建的。
2.3 PS.spawnPooledThread
[-> ProcessState.cpp]
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
//获取Binder线程名【见小节2.3.1】
String8 name = makeBinderThreadName();
//此处isMain=true【见小节2.3.2】
sp<Thread> t = new PoolThread(isMain);
t->run(name.string());
}
}
2.3.1 makeBinderThreadName
[-> ProcessState.cpp]
String8 ProcessState::makeBinderThreadName() {
int32_t s = android_atomic_add(1, &mThreadPoolSeq);
String8 name;
name.appendFormat("Binder_%X", s);
return name;
}
获取Binder线程名,格式为Binder_x, 其中x为整数。每个进程中的binder编码是从1开始,依次递增; 只有通过spawnPooledThread方法来创建的线程才符合这个格式,对于直接将当前线程通过joinThreadPool加入线程池的线程名则不符合这个命名规则。 另外,目前Android N中Binder命令已改为Binder:<pid>_x格式, 则对于分析问题很有帮忙,通过binder名称的pid字段可以快速定位该binder线程所属的进程p.
2.3.2 PoolThread.run
[-> ProcessState.cpp]
class PoolThread : public Thread
{
public:
PoolThread(bool isMain)
: mIsMain(isMain)
{
}
protected:
virtual bool threadLoop() {
IPCThreadState::self()->joinThreadPool(mIsMain); //【见小节2.4】
return false;
}
const bool mIsMain;
};
从函数名看起来是创建线程池,其实就只是创建一个线程,该PoolThread继承Thread类。t->run()方法最终调用 PoolThread的threadLoop()方法。
2.4 IPC.joinThreadPool
[-> IPCThreadState.cpp]
void IPCThreadState::joinThreadPool(bool isMain)
{
//创建Binder线程
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
set_sched_policy(mMyThreadId, SP_FOREGROUND); //设置前台调度策略
status_t result;
do {
processPendingDerefs(); //清除队列的引用[见小节2.5]
result = getAndExecuteCommand(); //处理下一条指令[见小节2.6]
if (result < NO_ERROR && result != TIMED_OUT
&& result != -ECONNREFUSED && result != -EBADF) {
abort();
}
if(result == TIMED_OUT && !isMain) {
break; ////非主线程出现timeout则线程退出
}
} while (result != -ECONNREFUSED && result != -EBADF);
mOut.writeInt32(BC_EXIT_LOOPER); // 线程退出循环
talkWithDriver(false); //false代表bwr数据的read_buffer为空
}
- 对于
isMain=true的情况下, command为BC_ENTER_LOOPER,代表的是Binder主线程,不会退出的线程; - 对于
isMain=false的情况下,command为BC_REGISTER_LOOPER,表示是由binder驱动创建的线程。
2.5 processPendingDerefs
[-> IPCThreadState.cpp]
void IPCThreadState::processPendingDerefs()
{
if (mIn.dataPosition() >= mIn.dataSize()) {
size_t numPending = mPendingWeakDerefs.size();
if (numPending > 0) {
for (size_t i = 0; i < numPending; i++) {
RefBase::weakref_type* refs = mPendingWeakDerefs[i];
refs->decWeak(mProcess.get()); //弱引用减一
}
mPendingWeakDerefs.clear();
}
numPending = mPendingStrongDerefs.size();
if (numPending > 0) {
for (size_t i = 0; i < numPending; i++) {
BBinder* obj = mPendingStrongDerefs[i];
obj->decStrong(mProcess.get()); //强引用减一
}
mPendingStrongDerefs.clear();
}
}
}
2.6 getAndExecuteCommand
[-> IPCThreadState.cpp]
status_t IPCThreadState::getAndExecuteCommand()
{
status_t result;
int32_t cmd;
result = talkWithDriver(); //与binder进行交互[见小节2.7]
if (result >= NO_ERROR) {
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) return result;
cmd = mIn.readInt32();
pthread_mutex_lock(&mProcess->mThreadCountLock);
mProcess->mExecutingThreadsCount++;
pthread_mutex_unlock(&mProcess->mThreadCountLock);
result = executeCommand(cmd); //执行Binder响应码 [见小节2.8]
pthread_mutex_lock(&mProcess->mThreadCountLock);
mProcess->mExecutingThreadsCount--;
pthread_cond_broadcast(&mProcess->mThreadCountDecrement);
pthread_mutex_unlock(&mProcess->mThreadCountLock);
set_sched_policy(mMyThreadId, SP_FOREGROUND);
}
return result;
}
2.7 talkWithDriver
//mOut有数据,mIn还没有数据。doReceive默认值为true
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
binder_write_read bwr;
...
// 当同时没有输入和输出数据则直接返回
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
...
do {
//ioctl执行binder读写操作,经过syscall,进入Binder驱动。调用Binder_ioctl
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
...
} while (err == -EINTR);
...
return err;
}
在这里调用的isMain=true,也就是向mOut例如写入的便是BC_ENTER_LOOPER. 经过talkWithDriver(), 接下来程序往哪进行呢?在文章彻底理解Android Binder通信架构详细讲解了Binder通信过程,那么从binder_thread_write()往下说BC_ENTER_LOOPER的处理过程。
2.7.1 binder_thread_write
[-> binder.c]
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
//拷贝用户空间的cmd命令,此时为BC_ENTER_LOOPER
if (get_user(cmd, (uint32_t __user *)ptr)) -EFAULT;
ptr += sizeof(uint32_t);
switch (cmd) {
case BC_REGISTER_LOOPER:
if (thread->looper & BINDER_LOOPER_STATE_ENTERED) {
//出错原因:线程调用完BC_ENTER_LOOPER,不能执行该分支
thread->looper |= BINDER_LOOPER_STATE_INVALID;
} else if (proc->requested_threads == 0) {
//出错原因:没有请求就创建线程
thread->looper |= BINDER_LOOPER_STATE_INVALID;
} else {
proc->requested_threads--;
proc->requested_threads_started++;
}
thread->looper |= BINDER_LOOPER_STATE_REGISTERED;
break;
case BC_ENTER_LOOPER:
if (thread->looper & BINDER_LOOPER_STATE_REGISTERED) {
//出错原因:线程调用完BC_REGISTER_LOOPER,不能立刻执行该分支
thread->looper |= BINDER_LOOPER_STATE_INVALID;
}
//创建Binder主线程
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
case BC_EXIT_LOOPER:
thread->looper |= BINDER_LOOPER_STATE_EXITED;
break;
}
...
}
*consumed = ptr - buffer;
}
return 0;
}
处理完BC_ENTER_LOOPER命令后,一般情况下成功设置thread->looper |= BINDER_LOOPER_STATE_ENTERED。那么binder线程的创建是在什么时候呢? 那就当该线程有事务需要处理的时候,进入binder_thread_read()过程。
2.7.2 binder_thread_read
binder_thread_read(){
...
retry:
//当前线程todo队列为空且transaction栈为空,则代表该线程是空闲的
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
if (thread->return_error != BR_OK && ptr < end) {
...
put_user(thread->return_error, (uint32_t __user *)ptr);
ptr += sizeof(uint32_t);
goto done; //发生error,则直接进入done
}
thread->looper |= BINDER_LOOPER_STATE_WAITING;
if (wait_for_proc_work)
proc->ready_threads++; //可用线程个数+1
binder_unlock(__func__);
if (wait_for_proc_work) {
if (non_block) {
...
} else
//当进程todo队列没有数据,则进入休眠等待状态
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
if (non_block) {
...
} else
//当线程todo队列没有数据,则进入休眠等待状态
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
binder_lock(__func__);
if (wait_for_proc_work)
proc->ready_threads--; //可用线程个数-1
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
if (ret)
return ret; //对于非阻塞的调用,直接返回
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//先考虑从线程todo队列获取事务数据
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct binder_work, entry);
//线程todo队列没有数据, 则从进程todo对获取事务数据
} else if (!list_empty(&proc->todo) && wait_for_proc_work) {
w = list_first_entry(&proc->todo, struct binder_work, entry);
} else {
... //没有数据,则返回retry
}
switch (w->type) {
case BINDER_WORK_TRANSACTION: ... break;
case BINDER_WORK_TRANSACTION_COMPLETE:... break;
case BINDER_WORK_NODE: ... break;
case BINDER_WORK_DEAD_BINDER:
case BINDER_WORK_DEAD_BINDER_AND_CLEAR:
case BINDER_WORK_CLEAR_DEATH_NOTIFICATION:
struct binder_ref_death *death;
uint32_t cmd;
death = container_of(w, struct binder_ref_death, work);
if (w->type == BINDER_WORK_CLEAR_DEATH_NOTIFICATION)
cmd = BR_CLEAR_DEATH_NOTIFICATION_DONE;
else
cmd = BR_DEAD_BINDER;
put_user(cmd, (uint32_t __user *)ptr;
ptr += sizeof(uint32_t);
put_user(death->cookie, (void * __user *)ptr);
ptr += sizeof(void *);
...
if (cmd == BR_DEAD_BINDER)
goto done; //Binder驱动向client端发送死亡通知,则进入done
break;
}
if (!t)
continue; //只有BINDER_WORK_TRANSACTION命令才能继续往下执行
...
break;
}
done:
*consumed = ptr - buffer;
//创建线程的条件
if (proc->requested_threads + proc->ready_threads == 0 &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED))) {
proc->requested_threads++;
// 生成BR_SPAWN_LOOPER命令,用于创建新的线程
put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer);
}
return 0;
}
当发生以下3种情况之一,便会进入done:
- 当前线程的return_error发生error的情况;
- 当Binder驱动向client端发送死亡通知的情况;
- 当类型为BINDER_WORK_TRANSACTION(即收到命令是BC_TRANSACTION或BC_REPLY)的情况;
任何一个Binder线程当同时满足以下条件,则会生成用于创建新线程的BR_SPAWN_LOOPER命令:
- 当前进程中没有请求创建binder线程,即requested_threads = 0;
- 当前进程没有空闲可用的binder线程,即ready_threads = 0;(线程进入休眠状态的个数就是空闲线程数)
- 当前进程已启动线程个数小于最大上限(默认15);
- 当前线程已接收到BC_ENTER_LOOPER或者BC_REGISTER_LOOPER命令,即当前处于BINDER_LOOPER_STATE_REGISTERED或者BINDER_LOOPER_STATE_ENTERED状态。【小节2.6】已设置状态为BINDER_LOOPER_STATE_ENTERED,显然这条件是满足的。
从system_server的binder线程一直的执行流: IPC.joinThreadPool –> IPC.getAndExecuteCommand() -> IPC.talkWithDriver() ,但talkWithDriver收到事务之后, 便进入IPC.executeCommand(), 接下来,从executeCommand说起.
2.8 IPC.executeCommand
status_t IPCThreadState::executeCommand(int32_t cmd)
{
status_t result = NO_ERROR;
switch ((uint32_t)cmd) {
...
case BR_SPAWN_LOOPER:
//创建新的binder线程 【见小节2.3】
mProcess->spawnPooledThread(false);
break;
...
}
return result;
}
Binder主线程的创建是在其所在进程创建的过程一起创建的,后面再创建的普通binder线程是由spawnPooledThread(false)方法所创建的。
2.9 思考
默认地,每个进程的binder线程池的线程个数上限为15,该上限不统计通过BC_ENTER_LOOPER命令创建的binder主线程, 只计算BC_REGISTER_LOOPER命令创建的线程。 对此,或者很多人不理解,例个栗子:某个进程的主线程执行如下方法,那么该进程可创建的binder线程个数上限是多少呢?
ProcessState::self()->setThreadPoolMaxThreadCount(6); // 6个线程
ProcessState::self()->startThreadPool(); // 1个线程
IPCThread::self()->joinThreadPool(); // 1个线程
首先线程池的binder线程个数上限为6个,通过startThreadPool()创建的主线程不算在最大线程上限,最后一句是将当前线程成为binder线程,所以说可创建的binder线程个数上限为8,如果还不理解,建议再多看看这几个方案的源码,多思考整个binder架构。
三. 总结
Binder设计架构中,只有第一个Binder主线程(也就是Binder_1线程)是由应用程序主动创建,Binder线程池的普通线程都是由Binder驱动根据IPC通信需求创建,Binder线程的创建流程图:
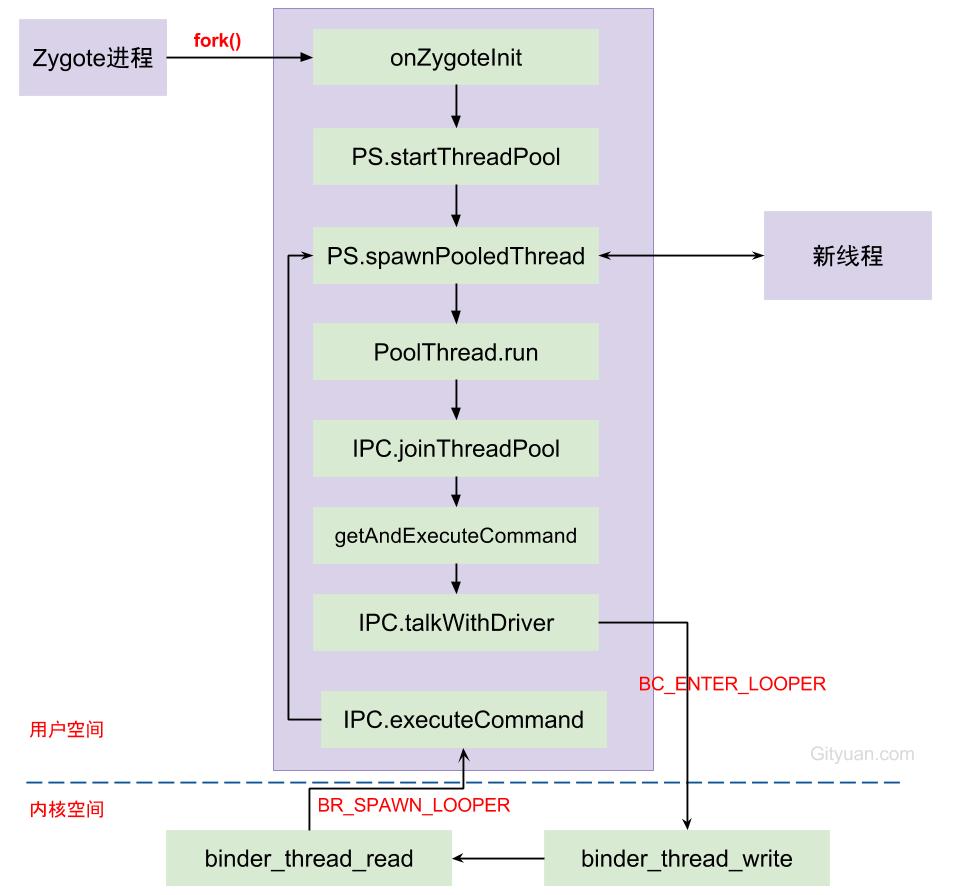
每次由Zygote fork出新进程的过程中,伴随着创建binder线程池,调用spawnPooledThread来创建binder主线程。当线程执行binder_thread_read的过程中,发现当前没有空闲线程,没有请求创建线程,且没有达到上限,则创建新的binder线程。
Binder的transaction有3种类型:
- call: 发起进程的线程不一定是在Binder线程, 大多數情況下,接收者只指向进程,并不确定会有哪个线程来处理,所以不指定线程;
- reply: 发起者一定是binder线程,并且接收者线程便是上次call时的发起线程(该线程不一定是binder线程,可以是任意线程)。
- async: 与call类型差不多,唯一不同的是async是oneway方式不需要回复,发起进程的线程不一定是在Binder线程, 接收者只指向进程,并不确定会有哪个线程来处理,所以不指定线程。
Binder系统中可分为3类binder线程:
- Binder主线程:进程创建过程会调用startThreadPool()过程中再进入spawnPooledThread(true),来创建Binder主线程。编号从1开始,也就是意味着binder主线程名为
binder_1,并且主线程是不会退出的。 - Binder普通线程:是由Binder Driver来根据是否有空闲的binder线程来决定是否创建binder线程,回调spawnPooledThread(false) ,isMain=false,该线程名格式为
binder_x。 - Binder其他线程:其他线程是指并没有调用spawnPooledThread方法,而是直接调用IPC.joinThreadPool(),将当前线程直接加入binder线程队列。例如: mediaserver和servicemanager的主线程都是binder线程,但system_server的主线程并非binder线程。