逻辑回归(Logistic Regression)
逻辑回归的定义
简单来说, 逻辑回归(Logistic Regression)是一种用于解决二分类(0 or 1)问题的机器学习方法,用于估计某种事物的可能性。比如某用户购买某商品的可能性,某病人患有某种疾病的可能性,以及某广告被用户点击的可能性等。 注意,这里用的是“可能性”,而非数学上的“概率”,logisitc回归的结果并非数学定义中的概率值,不可以直接当做概率值来用。该结果往往用于和其他特征值加权求和,而非直接相乘。
那么逻辑回归与线性回归是什么关系呢?
逻辑回归(Logistic Regression)与线性回归(Linear Regression)都是一种广义线性模型(generalized linear model)。逻辑回归假设因变量 y 服从伯努利分布,而线性回归假设因变量 y 服从高斯分布。 因此与线性回归有很多相同之处,去除Sigmoid映射函数的话,逻辑回归算法就是一个线性回归。可以说,逻辑回归是以线性回归为理论支持的,但是逻辑回归通过Sigmoid函数引入了非线性因素,因此可以轻松处理0/1分类问题。
假设函数(Hypothesis function)
首先我们要先介绍一下Sigmoid函数,也称为逻辑函数(Logistic function):
其函数曲线如下:
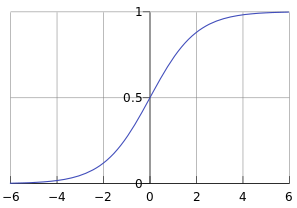
从上图可以看到sigmoid函数是一个s形的曲线,它的取值在[0, 1]之间,在远离0的地方函数的值会很快接近0或者1。它的这个特性对于解决二分类问题十分重要
逻辑回归的假设函数形式如下:
所以:
其中 是我们的输入,
为我们要求取的参数。
一个机器学习的模型,实际上是把决策函数限定在某一组条件下,这组限定条件就决定了模型的假设空间。当然,我们还希望这组限定条件简单而合理。而逻辑回归模型所做的假设是:
这个函数的意思就是在给定 和
的条件下
的概率。
这里 就是我们上面提到的sigmoid函数,与之相对应的决策函数为:
选择0.5作为阈值是一个一般的做法,实际应用时特定的情况可以选择不同阈值,如果对正例的判别准确性要求高,可以选择阈值大一些,对正例的召回要求高,则可以选择阈值小一些。
决策边界(Decision Boundary)
决策边界,也称为决策面,是用于在N维空间,将不同类别样本分开的平面或曲面。
注意:决策边界是假设函数的属性,由参数决定,而不是由数据集的特征决定。
这里我们引用Andrew Ng 课程上的两张图来解释这个问题:
- 线性决策边界
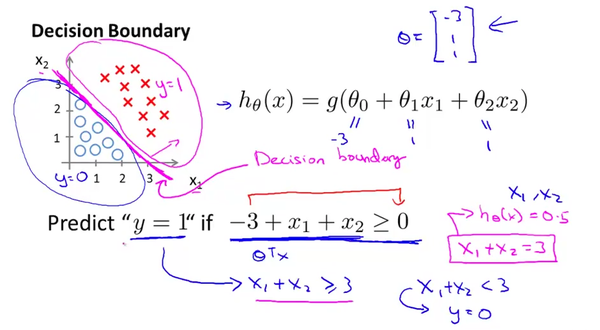
这里决策边界为:
- 非线性决策边界:
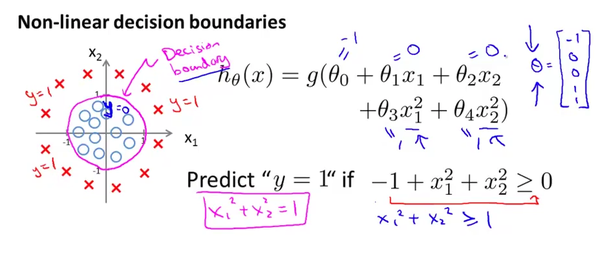
这里决策边界为:
上面两张图很清晰的解释了什么是决策边界,决策边界其实就是一个方程,在逻辑回归中,决策边界由 定义。
这里我们要注意理解一下假设函数和决策边界函数的区别与联系。决策边界是假设函数的属性,由假设函数的参数( )决定。
在逻辑回归中,假设函数 用于计算样本属于某类别的可能性;决策函数
用于计算(给出)样本的类别;决策边界
是一个方程,用于标识出分类函数(模型)的分类边界。
代价函数(Cost Function)
什么是代价函数?
假设有训练样本 ,模型为
, 参数为
。
(
表示
的转置)。
<1>. 概况来讲,任何能够衡量模型预测出来的值 与真实值
之间的差异的函数都可以叫做代价函数
,如果有多个样本,则可以将所有代价函数的取值求均值,记做
。因此很容易就可以得出以下关于代价函数的性质:
<2>. 当我们确定了模型 ,后面做的所有事情就是训练模型的参数
。那么什么时候模型的训练才能结束呢?这时候也涉及到代价函数,由于代价函数是用来衡量模型好坏的,我们的目标当然是得到最好的模型(也就是最符合训练样本的模型)。因此训练参数的过程就是不断改变
,从而得到更小的
的过程。理想情况下,当我们取到代价函数J的最小值时,就得到了最优的参数
,记为:
例如, ,表示我们的模型完美的拟合了观察的数据,没有任何误差。
<3>. 在优化参数θ的过程中,最常用的方法是梯度下降,这里的梯度就是代价函数 对
的偏导数。由于需要求偏导,我们可以得到另一个关于代价函数的性质:
- 选择代价函数时,最好挑选对参数
可微的函数(全微分存在,偏导数一定存在)
代价函数的常见形式
经过上面的描述,一个好的代价函数需要满足两个最基本的要求:能够评价模型的准确性,对参数 可微。
<1>. 在线性回归中,最常用的是均方误差(Mean squared error),即
<2>. 在逻辑回归中,最常用的是代价函数是交叉熵(Cross Entropy),交叉熵是一个常见的代价函数,在神经网络中也会用到。下面是《神经网络与深度学习》一书对交叉熵的解释:
交叉熵是对「出乎意料」(译者注:原文使用suprise)的度量。神经元的目标是去计算函数x→y=y(x)。但是我们让它取而代之计算函数x→a=a(x)。假设我们把a当作y等于1的概率,1−a是y等于0的概率。那么,交叉熵衡量的是我们在知道y的真实值时的平均「出乎意料」程度。当输出是我们期望的值,我们的「出乎意料」程度比较低;当输出不是我们期望的,我们的「出乎意料」程度就比较高。
在1948年,克劳德·艾尔伍德·香农将热力学的熵,引入到信息论,因此它又被称为香农熵(Shannon Entropy),它是香农信息量(Shannon Information Content, SIC)的期望。香农信息量用来度量不确定性的大小:一个事件的香农信息量等于0,表示该事件的发生不会给我们提供任何新的信息,例如确定性的事件,发生的概率是1,发生了也不会引起任何惊讶;当不可能事件发生时,香农信息量为无穷大,这表示给我们提供了无穷多的新信息,并且使我们无限的惊讶。更多解释可以看这里。
- 符号说明同上
代价函数的常见形式(cont)
但是我们会疑问,为什么这么定义代价函数呢?下面我会简单的解释一下:
对于单个的样本来讲, 所对应的
为:
上面的方程等价于:
当 时:
其函数图像为:

从图中可以看出, ,当预测值
时,可以看出代价h_ heta(x)=frac{1}{1+e{- hetaTx}}函数
的值为0,这正是我们希望的。如果预测值
即
,意思是预测
的概率为0,但是事实上
,因此代价函数
相当于给学习算法一个惩罚。
同理,我们也可以画出当 时, 函数
的图像:

代价函数与参数
代价函数衡量的是模型预测值h(θ) 与标准答案y之间的差异,所以总的代价函数J是h(θ)和y的函数,即,J=f(h(θ), y)。又因为y都是训练样本中给定的,h(θ)有θ决定,所以,最终还是模型参数θ的改变导致了J的改变。对于不同的θ,对应不同的预测值h(θ),也就对应着不同的代价函数J的取值。变化过程为:
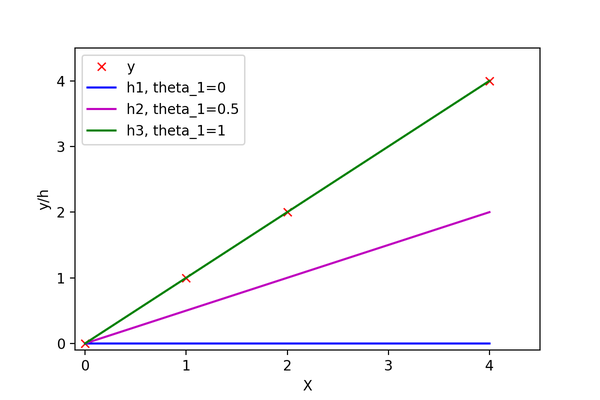
为了更直观的看到参数对代价函数的影响,举个简单的例子:
有训练样本{(0, 0), (1, 1), (2, 2), (4, 4)},即4对训练样本,每个样本中第1个是x的值,第2个是y的值。这几个点很明显都是y=x这条直线上的点。如下图:
import matplotlib.pyplot as plt
import numpy as np
X = np.array([[0, 1, 2, 4]]).T # 都转换成列向量
y = np.array([[0, 1, 2, 4]]).T
theta1 = np.array([[0, 0]]).T # 三个不同的theta_1值
theta2 = np.array([[0, 0.5]]).T
theta3 = np.array([[0, 1]]).T
X_size = X.shape
X_0 = np.ones((X_size[0],1)) # 添加x_0
X_with_x0 = np.concatenate((X_0, X), axis=1)
h1 = np.dot(X_with_x0, theta1)
h2 = np.dot(X_with_x0, theta2)
h3 = np.dot(X_with_x0, theta3)
plt.plot(X, y, 'rx', label='y')
plt.plot(X, h1, 'b', label='h1, theta_1=0')
plt.plot(X, h2, 'm', label='h2, theta_1=0.5')
plt.plot(X, h3, 'g', label='h3, theta_1=1')
plt.xlabel('X')
plt.ylabel('y/h')
plt.axis([-0.1, 4.5, -0.1, 4.5])
plt.legend(loc='upper left')
plt.savefig('liner_gression_error.png', dpi=200)
常数项为0,所以可以取θ0=0,然后取不同的θ1,可以得到不同的拟合直线。当θ1=0时,拟合的直线是y=0,即蓝色线段,此时距离样本点最远,代价函数的值(误差)也最大;当θ1=1时,拟合的直线是y=x,即绿色线段,此时拟合的直线经过每一个样本点,代价函数的值为0。
通过下图可以查看随着θ1的变化,J(θ)的变化情况:
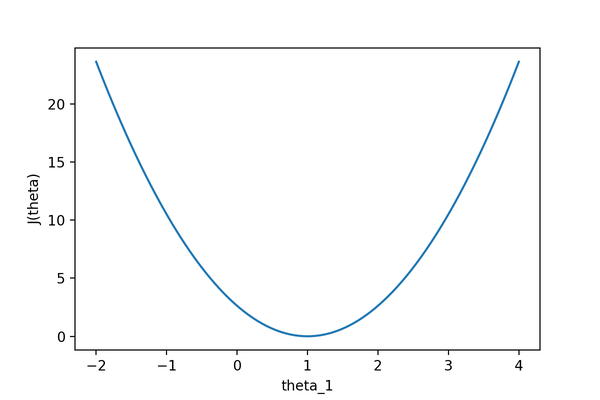
# 计算代价函数的值
def calcu_cost(theta, X, y):
m = X.shape[0] # sample size
X_0 = np.ones((m,1))
X_with_x0 = np.concatenate((X_0, X), axis=1)
h = np.dot(X_with_x0, theta)
return(np.dot((h-y).T, (h-y))/(2*m))
X = np.array([[0, 1, 2, 4]]).T
y = np.array([[0, 1, 2, 4]]).T
theta_0 = np.zeros((101, 1))
theta_1 = np.array([np.linspace(-2, 4, 101)]).T
theta = np.concatenate((theta_0, theta_1), axis=1) # 101组不同的参数
J_list = []
for i in range(101):
current_theta = theta[i:i+1].T
cost = calcu_cost(current_theta, X, y)
J_list.append(cost[0,0])
plt.plot(theta_1, J_list)
plt.xlabel('theta_1')
plt.ylabel('J(theta)')
plt.savefig('cost_theta.png', dpi=200)
从图中可以很直观的看到θ对代价函数的影响,当θ1=1时,代价函数J(θ)取到最小值。因为线性回归模型的代价函数(均方误差)的性质非常好,因此也可以直接使用代数的方法,求J(θ)的一阶导数为0的点,就可以直接求出最优的θ值。
代价函数与梯度
梯度下降中的梯度指的是代价函数对各个参数的偏导数,偏导数的方向决定了在学习过程中参数下降的方向,学习率(通常用α表示)决定了每步变化的步长,有了导数和学习率就可以使用梯度下降算法(Gradient Descent Algorithm)更新参数了, 即求解使 最小的参数
:
看来其和线性回归中的梯度下降函数形式一模一样,但其实是不一样的,因为在logistic回归中
关于从 到
推导如下:

