红外对管模块
红外对管模块由发射管接收管和配套电路组成,工作时发射管发射红外线,接收管接收发射回来的红外线。当红外线被深色物体吸收较多而发射回来的很少时,OUT端为高电平,否则为低电平。下图是实物图和线路图。一般白色的是发射管,黑色的是接收管。
图1 红外对管模块实物图
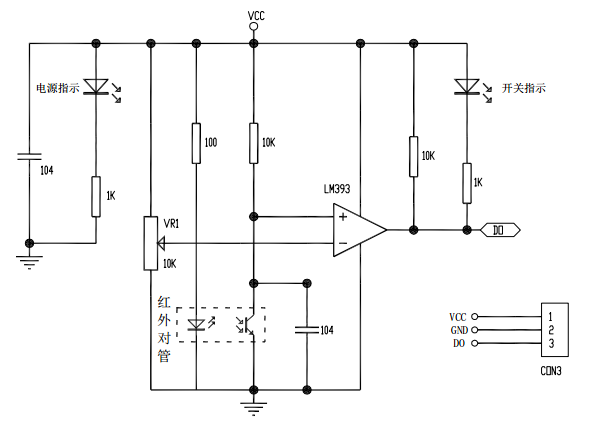
图2 红外对管模块线路
此模块有三个引脚,定义如下
VCC 外接3.3V-5V电压(可以单片机5v或3.3v)
GND 外接GND
OUT 数字量输出接口(0和1)
模块的使用说明
模块的LED检测到强反光障碍物时,电路板上绿色指示灯点亮,同时OUT端口持续输出低电平信号;模块的LED检测到黑色吸光障碍物时,电路板上绿色指示灯熄灭,同时OUT端口持续输出高电平信号。该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
小车红外循迹的原理
这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是下图所示红外对管探测法,利用红外线在不同颜色的物体表面具有不同反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地板时发生漫反射,反射光被装在接收管接收,如果遇到黑线则红外光被吸收,接收管接收不到红外光。单片机根据是否收到反射回来的红外光来确定黑线的位置和小车的行走路线。
小车简单循迹时,一般装两个红外对管模块,且两个发射管要在黑线中间,因此要求两个对管模块的安装和黑线的宽度要合适。如果要求小车能在丁字线上停止,需要装四个红外对管。对管输出端为高电平则表示对管在黑线上,输出端为低电平则表示对管在黑线外。
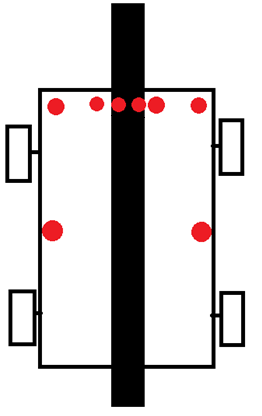
图3 小车循迹黑线示意图1
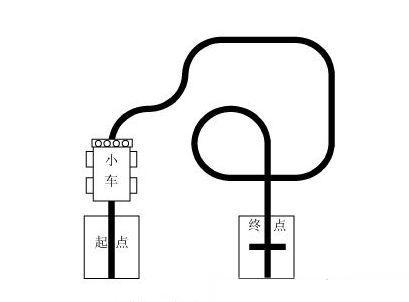
图4 小车循迹黑线示意图2
红外对管对管模块小车循迹电气原理图
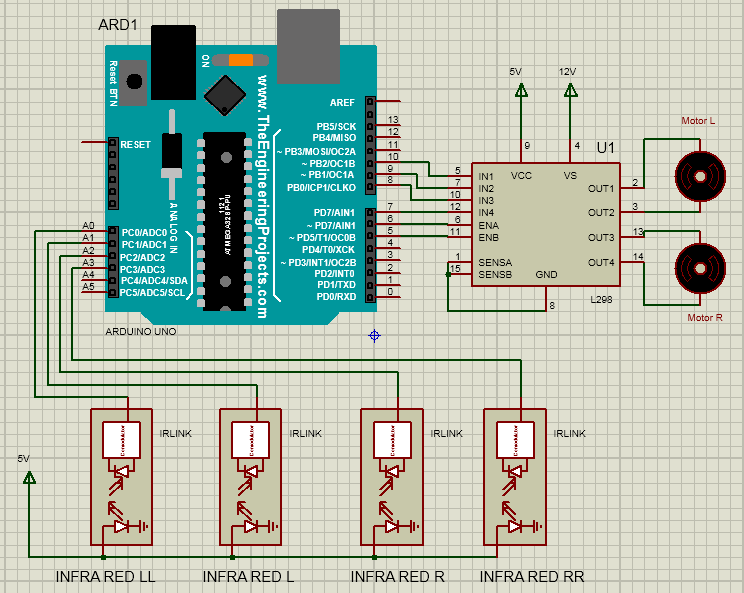
图5 小车循迹行走电气原理图
接线如下:红外对管的两个输出分别接控制板的2,3引脚,直流电机驱动板的输入引脚ENA,N1,IN2, ENB,IN3,IN4分别接控制板的6,10,9,5,8,7引脚,电机左电机右分别接驱动板的2,3和4,5引脚。
程序设计
1 //控制板引脚定义 2 int motor_L_ENA = 6; //左电机控制端连接于Arduino板的6,10,9引脚 3 int motor_L_IN1 = 10; 4 int motor_L_IN2 = 9; 5 int motor_R_ENB = 5; //右电机控制端连接于Arduino板的5,8,7引脚 6 int motor_R_IN3 = 8; 7 int motor_R_IN4 = 7; 8 9 int infrared_LL = A0; //左左侧红外传感器连接于Arduino板的A0引脚 10 int infrared_L = A1; //左侧红外传感器连接于Arduino板的A1引脚 11 int infrared_R = A2; //右侧红外传感器连接于Arduino板的A2引脚 12 int infrared_RR = A3; //右右侧红外传感器连接于Arduino板的A3引脚 13 14 int sensor_LL = 0; //左左侧红外传感器的检测值,默认值为1,在黑线外 15 int sensor_L = 1; //左侧红外传感器的检测值,默认值为1,在黑线上 16 int sensor_R = 1; //右侧红外传感器的检测值,默认值为1,在黑线上 17 int sensor_RR = 0; //右右侧红外传感器的检测值,默认值为0,在黑线外 18 int low_speed = 100; //左转右转时的高速低速设定,可调整 19 int high_speed = 200; 20 21 //子函数定义 22 void go_forward_high_speed() //小车前进 23 { 24 analogWrite(motor_L_ENA, high_speed); //左电机正转 25 digitalWrite(motor_L_IN1, 0); 26 digitalWrite(motor_L_IN2, 1); 27 28 analogWrite(motor_R_ENB,high_speed); //右电机正转 29 digitalWrite(motor_R_IN3, 0); 30 digitalWrite(motor_R_IN4, 1); 31 } 32 33 void stop_with_brake() //小车制动 34 { 35 digitalWrite(motor_L_ENA, 1); //左电机制动 36 digitalWrite(motor_L_IN1, 1); 37 digitalWrite(motor_L_IN2, 1) ; 38 39 digitalWrite(motor_R_ENB, 1); //右电机制动 40 digitalWrite(motor_R_IN3, 1); 41 digitalWrite(motor_R_IN4, 1) ; 42 } 43 44 void go_forward_left() //小车左转 45 { 46 digitalWrite(motor_L_IN1, 0); 47 digitalWrite(motor_L_IN2, 1); 48 analogWrite(motor_L_ENA, low_speed); //左轮低速 49 50 digitalWrite(motor_R_IN3, 0); 51 digitalWrite(motor_R_IN4, 1); 52 analogWrite(motor_R_ENB, high_speed); //右轮高速 53 } 54 55 void go_forward_right() //小车右转 56 { 57 digitalWrite(motor_L_IN1, 0); 58 digitalWrite(motor_L_IN2, 1); 59 analogWrite(motor_L_ENA, high_speed); //左轮高速 60 61 digitalWrite(motor_R_IN3, 0); 62 digitalWrite(motor_R_IN4, 1); 63 analogWrite(motor_R_ENB, low_speed); //右轮低速 64 } 65 66 67 void setup() 68 { 69 pinMode(motor_L_ENA, OUTPUT); //左电机使能和PWM调速口 70 pinMode(motor_L_IN1, OUTPUT); //左电机控制口1 71 pinMode(motor_L_IN2, OUTPUT); //左电机控制口2 72 73 pinMode(motor_R_ENB, OUTPUT); //右电机使能和PWM调速口 74 pinMode(motor_R_IN3, OUTPUT); //右电机控制口3 75 pinMode(motor_R_IN4, OUTPUT); //左电机控制口4 76 77 pinMode(infrared_L, INPUT); //左侧红外传感器 78 pinMode(infrared_LL, INPUT); //左左侧红外传感器 79 80 pinMode(infrared_R, INPUT); //右侧红外传感器 81 pinMode(infrared_RR, INPUT); //右右侧红外传感器 82 } 83 84 void loop() 85 { 86 sensor_LL=digitalRead(infrared_LL); 87 sensor_L=digitalRead(infrared_L); 88 sensor_R=digitalRead(infrared_R); 89 sensor_RR=digitalRead(infrared_RR); 90 91 if(sensor_LL==0 & sensor_L==1 & sensor_R==1 & sensor_RR==0) //小车在黑线上 92 { 93 go_forward_high_speed(); //前进 94 } 95 96 if(sensor_L==1 & sensor_R==0) //小车右偏 97 { 98 go_forward_left(); //小车左转100毫秒,时间可调整 99 delay(100); 100 } 101 102 if(sensor_L==0 & sensor_R==1) //小车左偏 103 { 104 go_forward_right(); //小车右转100毫秒,时间可调整 105 delay(100); 106 } 107 108 if(sensor_LL==1 & sensor_L==1 & sensor_R==1 & sensor_RR==1) //小车在停止线上 109 { 110 stop_with_brake(); //制动2秒 111 delay(2000); 112 } 113 }
运行效果
小车可沿黑线循迹行走,在丁字路口上自动停止。
注
实验时可以调整车行速度,可以调整纠偏力度和纠偏时间长度。