-
反向传播的推导
推导过程
TIPs
- (z=Wx,frac{partial z}{partial x}=W)
- 假设(W)是(n*m)的矩阵,(x)是(m*1)的矩阵,则函数(z)做的事情就是把输入(x:m*1)变为(y:n*1)的向量
- 显然(z_i=sum^m_{k=1}W_{ik}x_k),推导过程如下:(,当和相等时为(frac{partial z}{partial x})_{ij}=frac{partial z_i}{partial x_j}=frac{partial}{partial x_j}(sum^m_{k=1}W_{ik}x_k)=sum^m_{k=1}W_{ik}frac{partial}{partial x_j}x_k=W_{ij},(frac{partial}{partial x_j}x_k当k和j相等时为1)),这个值也是Jacobian矩阵中对应位置的值
- (z=xW,frac{partial z}{partial x}=W^T)
- (z=x,frac{partial z}{partial x}=I)
- 因为(frac{partial}{partial x_j}x_k)当k和j相等时为1,否则为0,则Jacobian矩阵中对角线的值全为1,是单位矩阵
- 类似的,我们可以想到如果(z=f(x)),那么对角线上对应的值为(f'(x_i)),即此时(frac{partial z}{partial x}=diag(f'(x))),且(diag(f'(x))I=circ f'(x))
- (z=Wx,delta = frac{partial J}{partial z},frac{partial J}{partial W}=frac{partial J}{partial z}frac{partial z}{partial W}=deltafrac{partial z}{partial W})中的(delta)
- (J)是损失函数,输出为标量,那么对(W)的Jacobian矩阵就是(1*nm)大小的矩阵,因为(W)的大小为(nm),但实际上的处理方法是将矩阵调整为和(W)一样的大小(比较方便),这样处理带来的问题是:(z)是一个向量(n×1),那么(frac{partial z}{partial W})的大小会是(n×m×n)!,为了避免这个问题引入记号(delta),则(frac{partial J}{partial W}=delta^Tx^T),因为(delta)是(1*n),(x)是(m*1),则按前面式子计算出来的结果就是(n*m)
- 稍微修改条件,(z=xW),那么对应的为(frac{partial J}{partial W}=x^Tdelta)
- (hat y=softmax( heta),J=CrossEntropy(y,hat y)) ,(frac{partial J}{partial heta}=hat y-y)
举例
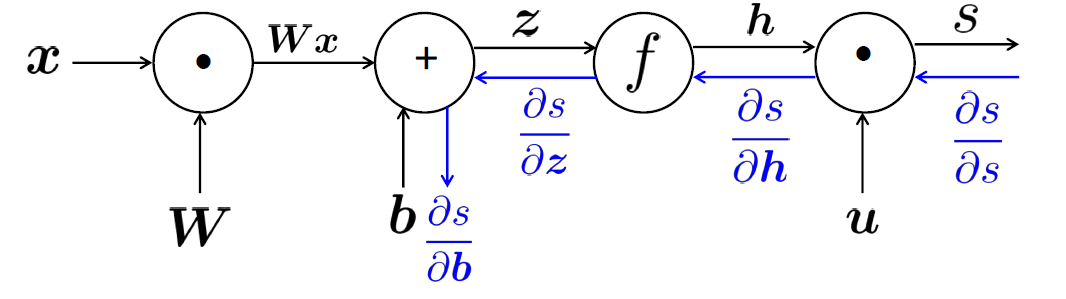
- (z=Wx+b),(h=f(z)),(s=u^Th)
- (frac{partial s}{partial W}=frac{partial s}{partial h}frac{partial h}{partial z}frac{partial z}{partial W}),(frac{partial s}{partial b}=frac{partial s}{partial h}frac{partial h}{partial z}frac{partial z}{partial b})
- 令(delta)为(frac{partial s}{partial h}frac{partial h}{partial z}),避免重复计算,且(delta=u^Tcirc f'(z))
- 单独看(frac{partial s}{partial W_{ij}}=delta_ix_j),(delta_i)是从终点反向传播回去积累的,(x_j)是(j)节点对应用的函数的梯度
- 不断运用链式法则将误差反向传播回去,灵活运用(delta)避免重复运算
Reference
- 斯坦福cs224n深度学习自然语言处理
-
相关阅读:
极验验证(滑动验证)的使用
from close /destory
tmeminifile and tinifile
Delphi的OverRide、OverLoad和Virtual方法
XE6 FMX之控件绘制与显示
Delphi Android程序启动过程
Delphi中的容器类
接口
集合
class methed
-
原文地址:https://www.cnblogs.com/MartinLwx/p/9694060.html
Copyright © 2020-2023
润新知