/************声明:本人只是见到这篇文章对我帮助很大才转载的,但是这个完整的程序里面本来有语法错误的,现在让我改过来了************/
今天的主角àUART0串口。因此对他的一切操作都和文件的操作一样(涉及到了open,read,write,close等文件的基本操作)。
一.Linux下的串口编程又那几部分组成
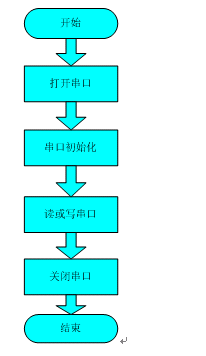
1. 打开串口
2. 串口初始化
3. 读串口或写串口
4. 关闭串口
二.串口的打开
既然串口在linux中被看作了文件,那么在对文件进行操作前先要对其进行打开操作。
1.在Linxu中,串口设备是通过串口终端设备文件来访问的,即通过访问/dev/ttyS0,/dev/ttyS1,/dev/ttyS2这些设备文件实现对串口的访问。
2.调用open()函数来代开串口设备,对于串口的打开操作,必须使用O_NOCTTY参数。
l O_NOCTTY:表示打开的是一个终端设备,程序不会成为该端口的控制终端。如果不使用此标志,任务一个输入(eg:键盘中止信号等)都将影响进程。
l O_NDELAY:表示不关心DCD信号线所处的状态(端口的另一端是否激活或者停止)。
3.打开串口模块有那及部分组成
1>调用open()函数打开串口,获取串口设备文件描述符
2>获取串口状态,判断是否阻塞
3>测试打开的文件描述符是否为终端设备

4程序:
/*****************************************************************
* 名称: UART0_Open
* 功能: 打开串口并返回串口设备文件描述
* 入口参数: fd :文件描述符 port :串口号(ttyS0,ttyS1,ttyS2)
* 出口参数: 正确返回为1,错误返回为0
*****************************************************************/
int UART0_Open(int fd,char* port)
{
fd = open( port, O_RDWR|O_NOCTTY|O_NDELAY);
if (FALSE == fd)
{
perror("Can't Open Serial Port");
return(FASLE);
}
//判断串口的状态是否为阻塞状态
if(fcntl(fd, F_SETFL, 0) < 0)
{
printf("fcntl failed!/n");
return(FALSE);
}
else
{
printf("fcntl=%d/n",fcntl(fd, F_SETFL,0));
}
//测试是否为终端设备
if(0 == isatty(STDIN_FILENO))
{
printf("standard input is not a terminal device/n");
return(FALSE);
}
else
{
printf("isatty success!/n");
}
printf("fd->open=%d/n",fd);
return fd;
}
三.串口的初始化
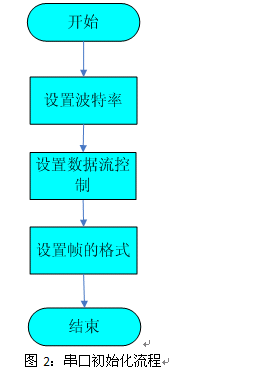
1. 在linux中的串口初始化和前面的串口初始化一样。需要设置串口波特率,数据流控制,帧的格式(即数据位个数,停止位,校验位,数据流控制)
2. 串口初始化模块有那几部分组成:
1>.设置波特率
2>设置数据流控制
2>设置帧的格式(即数据位个数,停止位,校验位)
John哥说明:
1>设置串口参数时要用到termios结构体,因此先要通过函数
tcgettattr(fd,&options)获得串口指向termios结构的指针。
2>通过cfsetispeed函数和cfsetospeed函数用来设置串口的输入/输出波特率。一般情况下,输入和输出波特率相等的。
3>设置数据位可以通过修改termios机构体中c_flag来实现。其中CS5,CS6,CS7,CS8对应数据位的5,6,7,8。在设置数据位时,必须要用CSIZE做位屏蔽。
4>数据流控制是使用何种方法来标志数据传输的开始和结束。
5>在设置完波特率,数据流控制,数据位,校验位,停止位,停止位后,还要设置最小等待时间和最小接收字符。
6>在完成配置后要通过tcsetattr()函数来激活配置。
3.程序:
/*******************************************************************
* 名称: UART0_Set
* 功能: 设置串口数据位,停止位和效验位
* 入口参数: fd 串口文件描述符
* speed 串口速度
* flow_ctrl 数据流控制
* databits 数据位 取值为 7 或者8
* stopbits 停止位 取值为 1 或者2
* parity 效验类型 取值为N,E,O,,S
*出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Set(int fd,int speed,int flow_ctrl,int databits,int stopbits,int parity)
{
int i;
int status;
int speed_arr[] = { B38400, B19200, B9600, B4800, B2400, B1200, B300,
B38400, B19200, B9600, B4800, B2400, B1200, B300 };
int name_arr[] = {38400, 19200, 9600, 4800, 2400, 1200, 300, 38400, 19200, 9600, 4800, 2400, 1200, 300 };
struct termios options;
/*tcgetattr(fd,&options)得到与fd指向对象的相关参数,并将它们保存于options,该函数,还可以测试配置是否正确,该串口是否可用等。若调用成功,函数返回值为0,若调用失败,函数返回值为1.
*/
if ( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(FALSE);
}
//设置串口输入波特率和输出波特率
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
cfsetispeed(&Options, speed_arr[i]);
cfsetospeed(&Options, speed_arr[i]);
}
}
//修改控制模式,保证程序不会占用串口
options.c_cflag |= CLOCAL;
//修改控制模式,使得能够从串口中读取输入数据
options.c_cflag |= CREAD;
//设置数据流控制
switch(flow_ctrl)
{
case 0 ://不使用流控制
options.c_cflag &= ~CRTSCTS;
break;
case 1 ://使用硬件流控制
options.c_cflag |= CRTSCTS;
break;
case 2 ://使用软件流控制
options.c_cflag |= IXON | IXOFF | IXANY;
break;
}
//设置数据位
options.c_cflag &= ~CSIZE; //屏蔽其他标志位
switch (databits)
{
case 5 :
options.c_cflag |= CS5;
break;
case 6 :
options.c_cflag |= CS6;
break;
case 7 :
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size/n");
return (FALSE);
}
//设置校验位
switch (parity)
{
case 'n':
case 'N': //无奇偶校验位。
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O'://设置为奇校验
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= INPCK;
break;
case 'e':
case 'E'://设置为偶校验
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= INPCK;
break;
case 's':
case 'S': //设置为空格
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity/n");
return (FALSE);
}
// 设置停止位
switch (stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
fprintf(stderr,"Unsupported stop bits/n");
return (FALSE);
}
//修改输出模式,原始数据输出
options.c_oflag &= ~OPOST;
//设置等待时间和最小接收字符
options.c_cc[VTIME] = 1; /* 读取一个字符等待1*(1/10)s */
options.c_cc[VMIN] = 1; /* 读取字符的最少个数为1 */
//如果发生数据溢出,接收数据,但是不再读取
tcflush(fd,TCIFLUSH);
//激活配置 (将修改后的termios数据设置到串口中)
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("com set error!/n");
return (FALSE);
}
return (TRUE);
}
/*******************************************************************
* 名称: UART0_Init()
* 功能: 串口初始化
* 入口参数: fd 文件描述符
* speed 串口速度
* flow_ctrl 数据流控制
* databits 数据位 取值为 7 或者8
* stopbits 停止位 取值为 1 或者2
* parity 效验类型 取值为N,E,O,,S
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Init(int fd, int speed,int flow_ctrlint databits,int stopbits,int parity)
{
int err;
//设置串口数据帧格式
if (UART0_Set(fd,115200,0,8,1,'N') == FALSE)
{
return FALSE;
}
else
{
return TRUE;
}
}
注:
如果不是开发终端之类的,只是串口传输数据,而不需要串口来处理,那么使用原始模式(Raw Mode)方式来通讯,设置方式如下:
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/
options.c_oflag &= ~OPOST; /*Output*/
四. 串口的读写函数:
1. 读写串口是通过使用read函数和write函数来实现的。
2. 程序
/*******************************************************************
* 名称: UART0_Recv
* 功能: 接收串口数据
* 入口参数: fd :文件描述符
* rcv_buf :接收串口中数据存入rcv_buf缓冲区中
* data_len :一帧数据的长度
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Recv(int fd, char *rcv_buf,int data_len)
{
int len,fs_sel;
fd_set fs_read;
struct timeval time;
FD_ZERO(&fs_read);
FD_SET(fd,&fs_read);
time.tv_sec = 10;
time.tv_usec = 0;
//使用select实现串口的多路通信
fs_sel = select(fd+1,&fs_read,NULL,NULL,&time);
if(fs_sel)
{
len = read(fd,data,data_len);
return len;
}
else
{
return FALSE;
}
}
/*******************************************************************
* 名称: UART0_Send
* 功能: 发送数据
* 入口参数: fd :文件描述符
* send_buf :存放串口发送数据
* data_len :一帧数据的个数
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Send(int fd, char *send_buf,int data_len)
{
int len = 0;
len = write(fd,send_buf,data_len);
if (len == data_len )
{
return len;
}
else
{
tcflush(fd,TCOFLUSH);
return FALSE;
}
}
五. 关闭串口
在完成对串口设备的操作后,要调用close函数关闭该文件描述符。
程序:
/******************************************************
* 名称: UART0_Close
* 功能: 关闭串口并返回串口设备文件描述
* 入口参数: fd :文件描述符
* 出口参数: void
*******************************************************************/
void UART0_Close(int fd)
{
close(fd);
}
一. 一个完整程序
- /************************Copyright(c)*******************************
- ** 西安邮电学院
- ** graduate school
- ** XNMS项目组
- ** WebSite :blog.csdn.net/tigerjb
- **------------------------------------------FileInfo-------------------------------------------------------
- ** File name: main.c
- ** Last modified Date: 2011-01-31
- ** Last Version: 1.0
- ** Descriptions:
- **------------------------------------------------------------------------------------------------------
- ** Created by: 冀博
- ** Created date: 2011-01-31
- ** Version: 1.0
- ** Descriptions: The original version
- **------------------------------------------------------------------------------------------------------
- ** Modified by:
- ** Modified date:
- ** Version:
- ** Descriptions:
- *******************************************************************/
- //串口相关的头文件
- #include<stdio.h> /*标准输入输出定义*/
- #include<stdlib.h> /*标准函数库定义*/
- #include<unistd.h> /*Unix 标准函数定义*/
- #include<sys/types.h>
- #include<sys/stat.h>
- #include<fcntl.h> /*文件控制定义*/
- #include<termios.h> /*PPSIX 终端控制定义*/
- #include<errno.h> /*错误号定义*/
- #include<string.h>
- //宏定义
- #define FALSE -1
- #define TRUE 0
- /*******************************************************************
- * 名称: UART0_Open
- * 功能: 打开串口并返回串口设备文件描述
- * 入口参数: fd :文件描述符 port :串口号(ttyS0,ttyS1,ttyS2)
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Open(int fd,char* port)
- {
- fd = open( port, O_RDWR|O_NOCTTY|O_NDELAY);
- if (FALSE == fd)
- {
- perror("Can't Open Serial Port");
- return(FALSE);
- }
- //恢复串口为阻塞状态
- if(fcntl(fd, F_SETFL, 0) < 0)
- {
- printf("fcntl failed! ");
- return(FALSE);
- }
- else
- {
- printf("fcntl=%d ",fcntl(fd, F_SETFL,0));
- }
- //测试是否为终端设备
- if(0 == isatty(STDIN_FILENO))
- {
- printf("standard input is not a terminal device ");
- return(FALSE);
- }
- else
- {
- printf("isatty success! ");
- }
- printf("fd->open=%d ",fd);
- return fd;
- }
- /*******************************************************************
- * 名称: UART0_Close
- * 功能: 关闭串口并返回串口设备文件描述
- * 入口参数: fd :文件描述符 port :串口号(ttyS0,ttyS1,ttyS2)
- * 出口参数: void
- *******************************************************************/
- void UART0_Close(int fd)
- {
- close(fd);
- }
- /*******************************************************************
- * 名称: UART0_Set
- * 功能: 设置串口数据位,停止位和效验位
- * 入口参数: fd 串口文件描述符
- * speed 串口速度
- * flow_ctrl 数据流控制
- * databits 数据位 取值为 7 或者8
- * stopbits 停止位 取值为 1 或者2
- * parity 效验类型 取值为N,E,O,,S
- *出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Set(int fd,int speed,int flow_ctrl,int databits,int stopbits,int parity)
- {
- int i;
- int status;
- int speed_arr[] = { B115200, B19200, B9600, B4800, B2400, B1200, B300};
- int name_arr[] = {115200, 19200, 9600, 4800, 2400, 1200, 300};
- struct termios options;
- /*tcgetattr(fd,&options)得到与fd指向对象的相关参数,并将它们保存于options,该函数还可以测试配置是否正确,该串口是否可用等。若调用成功,函数返回值为0,若调用失败,函数返回值为1.
- */
- if ( tcgetattr( fd,&options) != 0)
- {
- perror("SetupSerial 1");
- return(FALSE);
- }
- //设置串口输入波特率和输出波特率
- for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
- {
- if (speed == name_arr[i])
- {
- cfsetispeed(&options, speed_arr[i]);
- cfsetospeed(&options, speed_arr[i]);
- }
- }
- //修改控制模式,保证程序不会占用串口
- options.c_cflag |= CLOCAL;
- //修改控制模式,使得能够从串口中读取输入数据
- options.c_cflag |= CREAD;
- //设置数据流控制
- switch(flow_ctrl)
- {
- case 0 ://不使用流控制
- options.c_cflag &= ~CRTSCTS;
- break;
- case 1 ://使用硬件流控制
- options.c_cflag |= CRTSCTS;
- break;
- case 2 ://使用软件流控制
- options.c_cflag |= IXON | IXOFF | IXANY;
- break;
- }
- //设置数据位
- //屏蔽其他标志位
- options.c_cflag &= ~CSIZE;
- switch (databits)
- {
- case 5 :
- options.c_cflag |= CS5;
- break;
- case 6 :
- options.c_cflag |= CS6;
- break;
- case 7 :
- options.c_cflag |= CS7;
- break;
- case 8:
- options.c_cflag |= CS8;
- break;
- default:
- fprintf(stderr,"Unsupported data size ");
- return (FALSE);
- }
- //设置校验位
- switch (parity)
- {
- case 'n':
- case 'N': //无奇偶校验位。
- options.c_cflag &= ~PARENB;
- options.c_iflag &= ~INPCK;
- break;
- case 'o':
- case 'O'://设置为奇校验
- options.c_cflag |= (PARODD | PARENB);
- options.c_iflag |= INPCK;
- break;
- case 'e':
- case 'E'://设置为偶校验
- options.c_cflag |= PARENB;
- options.c_cflag &= ~PARODD;
- options.c_iflag |= INPCK;
- break;
- case 's':
- case 'S': //设置为空格
- options.c_cflag &= ~PARENB;
- options.c_cflag &= ~CSTOPB;
- break;
- default:
- fprintf(stderr,"Unsupported parity ");
- return (FALSE);
- }
- // 设置停止位
- switch (stopbits)
- {
- case 1:
- options.c_cflag &= ~CSTOPB; break;
- case 2:
- options.c_cflag |= CSTOPB; break;
- default:
- fprintf(stderr,"Unsupported stop bits ");
- return (FALSE);
- }
- //修改输出模式,原始数据输出
- options.c_oflag &= ~OPOST;
- options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);//我加的
- //options.c_lflag &= ~(ISIG | ICANON);
- //设置等待时间和最小接收字符
- options.c_cc[VTIME] = 1; /* 读取一个字符等待1*(1/10)s */
- options.c_cc[VMIN] = 1; /* 读取字符的最少个数为1 */
- //如果发生数据溢出,接收数据,但是不再读取 刷新收到的数据但是不读
- tcflush(fd,TCIFLUSH);
- //激活配置 (将修改后的termios数据设置到串口中)
- if (tcsetattr(fd,TCSANOW,&options) != 0)
- {
- perror("com set error! ");
- return (FALSE);
- }
- return (TRUE);
- }
- /*******************************************************************
- * 名称: UART0_Init()
- * 功能: 串口初始化
- * 入口参数: fd : 文件描述符
- * speed : 串口速度
- * flow_ctrl 数据流控制
- * databits 数据位 取值为 7 或者8
- * stopbits 停止位 取值为 1 或者2
- * parity 效验类型 取值为N,E,O,,S
- *
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Init(int fd, int speed,int flow_ctrl,int databits,int stopbits,int parity)
- {
- int err;
- //设置串口数据帧格式
- if (UART0_Set(fd,19200,0,8,1,'N') == FALSE)
- {
- return FALSE;
- }
- else
- {
- return TRUE;
- }
- }
- /*******************************************************************
- * 名称: UART0_Recv
- * 功能: 接收串口数据
- * 入口参数: fd :文件描述符
- * rcv_buf :接收串口中数据存入rcv_buf缓冲区中
- * data_len :一帧数据的长度
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Recv(int fd, char *rcv_buf,int data_len)
- {
- int len,fs_sel;
- fd_set fs_read;
- struct timeval time;
- FD_ZERO(&fs_read);
- FD_SET(fd,&fs_read);
- time.tv_sec = 10;
- time.tv_usec = 0;
- //使用select实现串口的多路通信
- fs_sel = select(fd+1,&fs_read,NULL,NULL,&time);
- if(fs_sel)
- {
- len = read(fd,rcv_buf,data_len);
- printf("I am right!(version1.2) len = %d fs_sel = %d ",len,fs_sel);
- return len;
- }
- else
- {
- printf("Sorry,I am wrong!");
- return FALSE;
- }
- }
- /********************************************************************
- * 名称: UART0_Send
- * 功能: 发送数据
- * 入口参数: fd :文件描述符
- * send_buf :存放串口发送数据
- * data_len :一帧数据的个数
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Send(int fd, char *send_buf,int data_len)
- {
- int len = 0;
- len = write(fd,send_buf,data_len);
- if (len == data_len )
- {
- return len;
- }
- else
- {
- tcflush(fd,TCOFLUSH);
- return FALSE;
- }
- }
- int main(int argc, char **argv)
- {
- int fd; //文件描述符
- int err; //返回调用函数的状态
- int len;
- int i;
- char rcv_buf[100];
- char send_buf[20]="tiger john";
- if(argc != 3)
- {
- printf("Usage: %s /dev/ttySn 0(send data)/1 (receive data) ",argv[0]);
- return FALSE;
- }
- fd = UART0_Open(fd,argv[1]); //打开串口,返回文件描述符
- do{
- err = UART0_Init(fd,19200,0,8,1,'N');
- printf("Set Port Exactly! ");
- }while(FALSE == err || FALSE == fd);
- if(0 == strcmp(argv[2],"0"))
- {
- for(i = 0;i < 10;i++)
- {
- len = UART0_Send(fd,send_buf,10);
- if(len > 0)
- printf(" %d send data successful ",i);
- else
- printf("send data failed! ");
- sleep(2);
- }
- UART0_Close(fd);
- }
- else
- {
- while (1) //循环读取数据
- {
- len = UART0_Recv(fd, rcv_buf,9);
- if(len > 0)
- {
- rcv_buf[len] = '�';
- printf("receive data is %s ",rcv_buf);
- printf("len = %d ",len);
- }
- else
- {
- printf("cannot receive data ");
- }
- sleep(2);
- }
- UART0_Close(fd);
- }
- }
- /********************************************************************* End Of File **
- *******************************************************************/