vivi 相对于后面要分析的 usb 摄像头驱动程序,它没有真正的硬件相关层的操作,也就是说抛开了复杂的 usb 层的相关知识,便于理解 V4L2 驱动框架,侧重于驱动和应用的交互。
前面我们提到,V4L2 的核心是 v4l2-dev.c 它向上提供统一的文件操作接口 v4l2_fops ,向下提供 video_device 注册接口 register_video_device ,作为一个具体的驱动,需要做的工作就是分配、设置、注册一个 video_device.框架很简单,复杂的是视频设备相关众多的 ioctl。
一、vivi 框架分析
static int __init vivi_init(void) { ret = vivi_create_instance(i); ... return ret; } module_init(vivi_init);
vivi 分配了一个 video_device 指针,没有去设置而是直接让它指向了一个现成的 video_device 结构 vivi_template ,那么全部的工作都将围绕 vivi_template 展开。
static int __init vivi_create_instance(int inst) { struct vivi_dev *dev; struct video_device *vfd; struct v4l2_ctrl_handler *hdl; struct vb2_queue *q; // 分配一个 vivi_dev 结构体 dev = kzalloc(sizeof(*dev), GFP_KERNEL); // v4l2_dev 初始化,并没有什么作用 ret = v4l2_device_register(NULL, &dev->v4l2_dev); // 设置 dev 的一些参数,比如图像格式、大小 dev->fmt = &formats[0]; dev->width = 640; dev->height = 480; dev->pixelsize = dev->fmt->depth / 8; ... // vivi_dev->vb_vidq(vb2_queue) 初始化 q = &dev->vb_vidq; memset(q, 0, sizeof(dev->vb_vidq)); q->type = V4L2_BUF_TYPE_VIDEO_CAPTURE; q->io_modes = VB2_MMAP | VB2_USERPTR | VB2_DMABUF | VB2_READ; q->drv_priv = dev; q->buf_struct_size = sizeof(struct vivi_buffer); // vivi_dev->vb_vidq(vb2_queue)->ops q->ops = &vivi_video_qops; // vivi_dev->vb_vidq(vb2_queue)->mem_ops q->mem_ops = &vb2_vmalloc_memops; // 初始化一些锁之类的东西 vb2_queue_init(q); /* init video dma queues */ INIT_LIST_HEAD(&dev->vidq.active); init_waitqueue_head(&dev->vidq.wq); // 分配一个 video_device ,这才是重点 vfd = video_device_alloc(); *vfd = vivi_template; vfd->debug = debug; vfd->v4l2_dev = &dev->v4l2_dev; set_bit(V4L2_FL_USE_FH_PRIO, &vfd->flags); vfd->lock = &dev->mutex; // 注册 video_device !!! ret = video_register_device(vfd, VFL_TYPE_GRABBER, video_nr); // 把 vivi_dev 放入 video_device->dev->p->driver_data ,这个后边经常用到 video_set_drvdata(vfd, dev); /* Now that everything is fine, let's add it to device list */ list_add_tail(&dev->vivi_devlist, &vivi_devlist); if (video_nr != -1) video_nr++; // vivi_dev->vfd(video_device) = vfd dev->vfd = vfd; v4l2_info(&dev->v4l2_dev, "V4L2 device registered as %s ", video_device_node_name(vfd)); return 0; }
用户空间调用的是 v4l2_fops ,但是最终会调用到 vivi_fops ,vivi_fops 中的 ioctl 调用 video_ioctl2
static struct video_device vivi_template = { .name = "vivi", .fops = &vivi_fops, .ioctl_ops = &vivi_ioctl_ops, .minor = -1, .release = video_device_release, .tvnorms = V4L2_STD_525_60, .current_norm = V4L2_STD_NTSC_M, };
video_register_device 过程就不详细分析了,前面的文章中分析过,大概就是向核心层注册 video_device 结构体,核心层注册字符设备并提供一个统一的 fops ,当用户空间 read write ioctl 等,最终还是会跳转到 video_device->fops ,还有一点就是核心层会把我们注册进来的 video_device 结构放入一个全局的 video_device数组。
static const struct v4l2_file_operations vivi_fops = { .owner = THIS_MODULE, .open = v4l2_fh_open, .release = vivi_close, .read = vivi_read, .poll = vivi_poll, .unlocked_ioctl = video_ioctl2, /* V4L2 ioctl handler */ .mmap = vivi_mmap, };
这里,先看一下 v4l2_fh_open 函数
int v4l2_fh_open(struct file *filp) { // 前面注册时,我们将 video_device 结构体放入了全局数组 video_device ,现在通过 video_devdata 函数取出来,后面经常用到这种做法 struct video_device *vdev = video_devdata(filp); // 分配一个 v4l2_fh 结构,放入file->private_data 中 struct v4l2_fh *fh = kzalloc(sizeof(*fh), GFP_KERNEL); filp->private_data = fh; if (fh == NULL) return -ENOMEM; v4l2_fh_init(fh, vdev); v4l2_fh_add(fh); return 0; }
1、我们随时可以通过 video_devdata 取出我们注册的 video_device 结构进行操作
2、我们随时可以通过 file->private_data 取出 v4l2_fh 结构,虽然现在还不知道它有啥用
下面来分析 ioctl ...首先来看一下调用过程
long video_ioctl2(struct file *file, unsigned int cmd, unsigned long arg) { return video_usercopy(file, cmd, arg, __video_do_ioctl); } static long __video_do_ioctl(struct file *file, unsigned int cmd, void *arg) { struct video_device *vfd = video_devdata(file); const struct v4l2_ioctl_ops *ops = vfd->ioctl_ops; void *fh = file->private_data; struct v4l2_fh *vfh = NULL; int use_fh_prio = 0; long ret = -ENOTTY; if (ops == NULL) { printk(KERN_WARNING "videodev: "%s" has no ioctl_ops. ", vfd->name); return ret; } if (test_bit(V4L2_FL_USES_V4L2_FH, &vfd->flags)) { vfh = file->private_data; use_fh_prio = test_bit(V4L2_FL_USE_FH_PRIO, &vfd->flags); } if (v4l2_is_known_ioctl(cmd)) { struct v4l2_ioctl_info *info = &v4l2_ioctls[_IOC_NR(cmd)]; if (!test_bit(_IOC_NR(cmd), vfd->valid_ioctls) && !((info->flags & INFO_FL_CTRL) && vfh && vfh->ctrl_handler)) return -ENOTTY; if (use_fh_prio && (info->flags & INFO_FL_PRIO)) { ret = v4l2_prio_check(vfd->prio, vfh->prio); if (ret) return ret; } } if ((vfd->debug & V4L2_DEBUG_IOCTL) && !(vfd->debug & V4L2_DEBUG_IOCTL_ARG)) { v4l_print_ioctl(vfd->name, cmd); printk(KERN_CONT " "); } switch (cmd) { /* --- capabilities ------------------------------------------ */ case VIDIOC_QUERYCAP: { struct v4l2_capability *cap = (struct v4l2_capability *)arg; cap->version = LINUX_VERSION_CODE; ret = ops->vidioc_querycap(file, fh, cap); if (!ret) dbgarg(cmd, "driver=%s, card=%s, bus=%s, " "version=0x%08x, " "capabilities=0x%08x, " "device_caps=0x%08x ", cap->driver, cap->card, cap->bus_info, cap->version, cap->capabilities, cap->device_caps); break; }
vivi 驱动就复杂在这些 ioctl 上,下面按照应用层与驱动的交互顺序来具体的分析这些 ioctl。
二、ioctl 深入分析
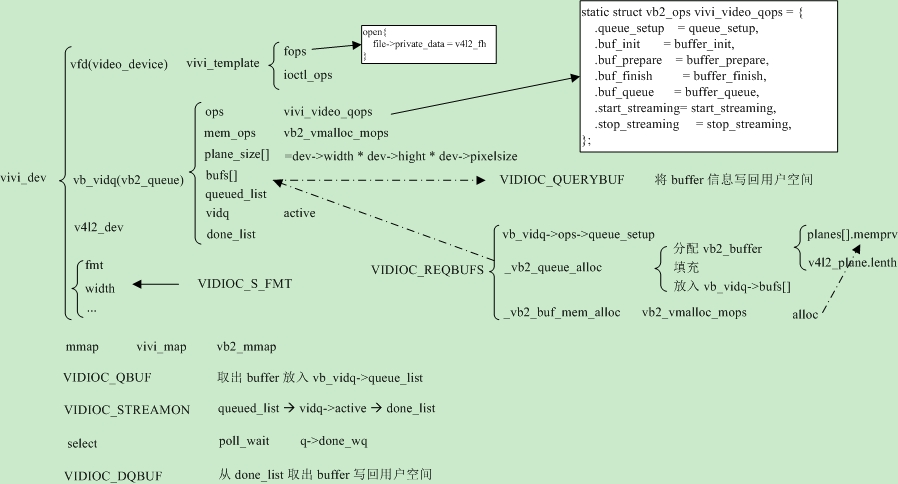
应用空间的一个视频 app 与驱动的交互流程大致如下图所示:

下面就根据流程,分析每一个 ioctl 在 vivi 中的具体实现。把以上的过程吃透,自己写一个虚拟摄像头程序应该就不成问题了。
2.1 VIDIOC_QUERYCAP 查询设备能力
应用层:
struct v4l2_capability { __u8 driver[16]; /* i.e. "bttv" */ __u8 card[32]; /* i.e. "Hauppauge WinTV" */ __u8 bus_info[32]; /* "PCI:" + pci_name(pci_dev) */ __u32 version; <span style="white-space:pre"> </span>/* should use KERNEL_VERSION() */ __u32 capabilities; /* Device capabilities */ __u32 reserved[4]; }; struct v4l2_capability cap; ret = ioctl(fd,VIDIOC_QUERYCAP,&cap); if (ret < 0) { LOG("VIDIOC_QUERYCAP failed (%d) ", ret); return ret; }
驱动层:
void *fh = file->private_data; ops->vidioc_querycap(file, fh, cap); static int vidioc_querycap(struct file *file, void *priv, struct v4l2_capability *cap) { struct vivi_fh *fh = priv; struct vivi_dev *dev = fh->dev; // 这里只是将一些信息写回用户空间而已,非常简单 strcpy(cap->driver, "vivi"); strcpy(cap->card, "vivi"); strlcpy(cap->bus_info, dev->v4l2_dev.name, sizeof(cap->bus_info)); cap->version = VIVI_VERSION; cap->capabilities =V4L2_CAP_VIDEO_CAPTURE |V4L2_CAP_STREAMING | V4L2_CAP_READWRITE;return 0;} }
一般我们只关心 capabilities 成员,比如V4L2_CAP_VIDEO_CAPTURE 具有视频捕获能力,其它定义如下:
/* Values for 'capabilities' field */ #define V4L2_CAP_VIDEO_CAPTURE 0x00000001 /* Is a video capture device */ #define V4L2_CAP_VIDEO_OUTPUT 0x00000002 /* Is a video output device */ #define V4L2_CAP_VIDEO_OVERLAY 0x00000004 /* Can do video overlay */ #define V4L2_CAP_VBI_CAPTURE 0x00000010 /* Is a raw VBI capture device */ #define V4L2_CAP_VBI_OUTPUT 0x00000020 /* Is a raw VBI output device */ #define V4L2_CAP_SLICED_VBI_CAPTURE 0x00000040 /* Is a sliced VBI capture device */ #define V4L2_CAP_SLICED_VBI_OUTPUT 0x00000080 /* Is a sliced VBI output device */ #define V4L2_CAP_RDS_CAPTURE 0x00000100 /* RDS data capture */ #define V4L2_CAP_VIDEO_OUTPUT_OVERLAY 0x00000200 /* Can do video output overlay */ #define V4L2_CAP_HW_FREQ_SEEK 0x00000400 /* Can do hardware frequency seek */ #define V4L2_CAP_RDS_OUTPUT 0x00000800 /* Is an RDS encoder */
2.2 VIDIOC_ENUM_FMT 枚举(查询)设备支持的视频格式
应用层:
struct v4l2_fmtdesc { __u32 index; /* Format number */ enum v4l2_buf_type type; /* buffer type */ __u32 flags; __u8 description[32]; /* Description string */ __u32 pixelformat; /* Format fourcc */ __u32 reserved[4]; }; struct v4l2_fmtdesc fmtdesc; fmtdesc.index=0; fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1) { printf("SUPPORT %d.%s ",fmtdesc.index+1,fmtdesc.description); fmtdesc.index++; }
驱动层:
static struct vivi_fmt formats[] = { { .name = "4:2:2, packed, YUYV", .fourcc = V4L2_PIX_FMT_YUYV, .depth = 16, }, ... } static int vidioc_enum_fmt_vid_cap(struct file *file, void *priv, struct v4l2_fmtdesc *f) { struct vivi_fmt *fmt; if (f->index >= ARRAY_SIZE(formats)) return -EINVAL; fmt = &formats[f->index]; strlcpy(f->description, fmt->name, sizeof(f->description)); f->pixelformat = fmt->fourcc; return 0; }
一般一个设备支持多种视频格式,比如 vivi 它所支持的格式存放在 formats 数组中,由于应用层并不知道设备支持多少种格式,也不知道某种格式具体存放在哪个数组项中,因此通过index从0开始尝试,对于驱动层来说就是遍历所有的数组项,返回每一个index对应的视频格式,比如 V4L2_PIX_FMT_YUYV .
2.3 VIDIOC_S_FMT 设置视频格式
应用层:
struct v4l2_format { enum v4l2_buf_type type; union { struct v4l2_pix_format pix; /* V4L2_BUF_TYPE_VIDEO_CAPTURE */ struct v4l2_window win; /* V4L2_BUF_TYPE_VIDEO_OVERLAY */ struct v4l2_vbi_format vbi; /* V4L2_BUF_TYPE_VBI_CAPTURE */ struct v4l2_sliced_vbi_format sliced; /* V4L2_BUF_TYPE_SLICED_VBI_CAPTURE */ __u8 raw_data[200]; /* user-defined */ } fmt; }; struct v4l2_pix_format { __u32 width; __u32 height; __u32 pixelformat; enum v4l2_field field; __u32 bytesperline; /* for padding, zero if unused */ __u32 sizeimage; enum v4l2_colorspace colorspace; __u32 priv; /* private data, depends on pixelformat */ }; struct v4l2_format fmt; memset(&fmt, 0, sizeof(fmt)); fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//格式类型 fmt.fmt.pix.width //宽度 fmt.fmt.pix.height //高度 fmt.fmt.pix.pixelformat = VIDEO_FORMAT;//这一项必须是前面查询出来的某种格式,对应 vivi formats数组 fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;//好像是隔行扫描的意思 ret = ioctl(fd, VIDIOC_S_FMT, &fmt); if (ret < 0) { LOG("VIDIOC_S_FMT failed (%d) ", ret); return ret; }
驱动层:
static int vidioc_s_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { struct vivi_dev *dev = video_drvdata(file); struct vb2_queue *q = &dev->vb_vidq; int ret = vidioc_try_fmt_vid_cap(file, priv, f); //if (fmt->fourcc == f->fmt.pix.pixelformat)返回formats[k] dev->fmt = get_format(f); dev->pixelsize = dev->fmt->depth / 8; dev->width = f->fmt.pix.width; dev->height = f->fmt.pix.height; dev->field = f->fmt.pix.field; return 0; } static int vidioc_try_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { struct vivi_dev *dev = video_drvdata(file); struct vivi_fmt *fmt; enum v4l2_field field; fmt = get_format(f); field = f->fmt.pix.field; if (field == V4L2_FIELD_ANY) { field = V4L2_FIELD_INTERLACED; } f->fmt.pix.field = field; v4l_bound_align_image(&f->fmt.pix.width, 48, MAX_WIDTH, 2, &f->fmt.pix.height, 32, MAX_HEIGHT, 0, 0); f->fmt.pix.bytesperline = (f->fmt.pix.width * fmt->depth) >> 3; f->fmt.pix.sizeimage = f->fmt.pix.height * f->fmt.pix.bytesperline; if (fmt->fourcc == V4L2_PIX_FMT_YUYV || fmt->fourcc == V4L2_PIX_FMT_UYVY) f->fmt.pix.colorspace = V4L2_COLORSPACE_SMPTE170M; else f->fmt.pix.colorspace = V4L2_COLORSPACE_SRGB; return 0; }
这里将应用层传进来的视频格式简单处理后存放进了一个 vivi_dev 结构,vivi_dev 哪里来的呢?,在一开始的时候 vivi_create_instance ,我们创建了一个 video_device 结构代表我们的设备,并设置了一个 vivi_dev 作为 video_device->dev->privatedata ,之后 register_video_device ,内核会自动将我们的 video_device 放入全局数组 video_device[] 中。
2.4 VIDIOC_G_FMT 获得设置好的视频格式
应用层:
ret = ioctl(fd, VIDIOC_G_FMT, &fmt); if (ret < 0) { LOG("VIDIOC_G_FMT failed (%d) ", ret); return ret; } // Print Stream Format LOG("Stream Format Informations: "); LOG(" type: %d ", fmt.type); LOG(" %d ", fmt.fmt.pix.width); LOG(" height: %d ", fmt.fmt.pix.height); char fmtstr[8]; memset(fmtstr, 0, 8); memcpy(fmtstr, &fmt.fmt.pix.pixelformat, 4); LOG(" pixelformat: %s ", fmtstr); LOG(" field: %d ", fmt.fmt.pix.field); LOG(" bytesperline: %d ", fmt.fmt.pix.bytesperline); LOG(" sizeimage: %d ", fmt.fmt.pix.sizeimage); LOG(" colorspace: %d ", fmt.fmt.pix.colorspace); LOG(" priv: %d ", fmt.fmt.pix.priv); LOG(" raw_date: %s ", fmt.fmt.raw_data);
驱动层:
static int vidioc_g_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { struct vivi_dev *dev = video_drvdata(file); <span style="white-space:pre"> </span>// 把记录在 vivi_dev 中的参数写回用户空间 f->fmt.pix.width = dev->width; f->fmt.pix.height = dev->height; f->fmt.pix.field = dev->field; f->fmt.pix.pixelformat = dev->fmt->fourcc; f->fmt.pix.bytesperline = (f->fmt.pix.width * dev->fmt->depth) >> 3; f->fmt.pix.sizeimage = f->fmt.pix.height * f->fmt.pix.bytesperline; if (dev->fmt->fourcc == V4L2_PIX_FMT_YUYV || dev->fmt->fourcc == V4L2_PIX_FMT_UYVY) f->fmt.pix.colorspace = V4L2_COLORSPACE_SMPTE170M; else f->fmt.pix.colorspace = V4L2_COLORSPACE_SRGB; return 0; }
将我们之前设置的格式返回而已。
2.5 VIDIOC_REQBUFS 请求在内核空间分配视频缓冲区
分配的内存位于内核空间,应用程序无法直接访问,需要通过调用mmap内存映射函数,把内核空间的内存映射到用户空间,应用才可以用用户空间地址来访问内核空间。
应用层:
struct v4l2_requestbuffers { __u32 count; __u32 type; /* enum v4l2_buf_type */ __u32 memory; /* enum v4l2_memory */ __u32 reserved[2]; }; struct v4l2_requestbuffers reqbuf; reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; reqbuf.memory = V4L2_MEMORY_MMAP; reqbuf.count = BUFFER_COUNT; ret = ioctl(fd , VIDIOC_REQBUFS, &reqbuf); if(ret < 0) { LOG("VIDIOC_REQBUFS failed (%d) ", ret); return ret; }
驱动层:
static int vidioc_reqbufs(struct file *file, void *priv, struct v4l2_requestbuffers *p) { struct vivi_dev *dev = video_drvdata(file); return vb2_reqbufs(&dev->vb_vidq, p); //核心层提供的标准函数 }
vb_vidq 是 vivi_dev 的一个成员,前面我们提到它有两个 ops ,一个是 ops 另一个是 mem_ops
static struct vb2_ops vivi_video_qops = { .queue_setup = queue_setup, .buf_init = buffer_init, .buf_prepare = buffer_prepare, .buf_finish = buffer_finish, .buf_cleanup = buffer_cleanup, .buf_queue = buffer_queue, .start_streaming= start_streaming, .stop_streaming = stop_streaming, .wait_prepare = vivi_unlock, .wait_finish = vivi_lock, }; static int vidioc_reqbufs(struct file *file, void *priv, struct v4l2_requestbuffers *p) { struct vivi_dev *dev = video_drvdata(file); return vb2_reqbufs(&dev->vb_vidq, p); //核心层提供的标准函数 } int vb2_reqbufs(struct vb2_queue *q, struct v4l2_requestbuffers *req) { unsigned int num_buffers, allocated_buffers, num_planes = 0; int ret = 0; // 判断 re->count 是否小于 VIDEO_MAX_FRAME num_buffers = min_t(unsigned int, req->count, VIDEO_MAX_FRAME); memset(q->plane_sizes, 0, sizeof(q->plane_sizes)); memset(q->alloc_ctx, 0, sizeof(q->alloc_ctx)); q->memory = req->memory; //(q)->ops->queue_setup(q,NULL,...) ret = call_qop(q, queue_setup, q, NULL, &num_buffers, &num_planes, q->plane_sizes, q->alloc_ctx); /* Finally, allocate buffers and video memory */ ret = __vb2_queue_alloc(q, req->memory, num_buffers, num_planes); allocated_buffers = ret; q->num_buffers = allocated_buffers; req->count = allocated_buffers; return 0; } static int queue_setup(struct vb2_queue *vq, const struct v4l2_format *fmt, unsigned int *nbuffers, unsigned int *nplanes, unsigned int sizes[], void *alloc_ctxs[]) { struct vivi_dev *dev = vb2_get_drv_priv(vq); unsigned long size; // 每一个buffer 的大小 size = dev->width * dev->height * dev->pixelsize; if (0 == *nbuffers) *nbuffers = 32; // 如果申请的buffer过多,导致空间不够减少buffer while (size * *nbuffers > vid_limit * 1024 * 1024) (*nbuffers)--; *nplanes = 1; // 把总大小放入 vivi_dev->vb_vidq->plane_size[0] sizes[0] = size; return 0; } static int __vb2_queue_alloc(struct vb2_queue *q, enum v4l2_memory memory, unsigned int num_buffers, unsigned int num_planes) { unsigned int buffer; struct vb2_buffer *vb; int ret; // 分配多个 vb2_buffer 填充并放入 vivi_dev->vb_vidq->bufs[] for (buffer = 0; buffer < num_buffers; ++buffer) { /* Allocate videobuf buffer structures */ vb = kzalloc(q->buf_struct_size, GFP_KERNEL); /* Length stores number of planes for multiplanar buffers */ if (V4L2_TYPE_IS_MULTIPLANAR(q->type)) vb->v4l2_buf.length = num_planes; vb->state = VB2_BUF_STATE_DEQUEUED; vb->vb2_queue = q; vb->num_planes = num_planes; vb->v4l2_buf.index = q->num_buffers + buffer; vb->v4l2_buf.type = q->type; vb->v4l2_buf.memory = memory; /* Allocate video buffer memory for the MMAP type */ if (memory == V4L2_MEMORY_MMAP) { ret = __vb2_buf_mem_alloc(vb);//核心提供的标准函数 ret = call_qop(q, buf_init, vb);//q->ops->buf_init } q->bufs[q->num_buffers + buffer] = vb; } __setup_offsets(q, buffer); return buffer; } static int __vb2_buf_mem_alloc(struct vb2_buffer *vb) { struct vb2_queue *q = vb->vb2_queue; void *mem_priv; int plane; /* num_planes == 1 */ for (plane = 0; plane < vb->num_planes; ++plane) { mem_priv = call_memop(q, alloc, q->alloc_ctx[plane], q->plane_sizes[plane]); /* Associate allocator private data with this plane */ vb->planes[plane].mem_priv = mem_priv; vb->v4l2_planes[plane].length = q->[plane]; } return 0; } static void *vb2_vmalloc_alloc(void *alloc_ctx, unsigned long size) { struct vb2_vmalloc_buf *buf; buf = kzalloc(sizeof(*buf), GFP_KERNEL); buf->size = size; // 分配空间 buf->vaddr = vmalloc_user(buf->size); buf->handler.refcount = &buf->refcount; buf->handler.put = vb2_vmalloc_put; buf->handler.arg = buf; atomic_inc(&buf->refcount); return buf; }
2.6 VIDIOC_QUERYBUF 查询分配好的 buffer 信息
查询已经分配好的V4L2视频缓冲区的相关信息,包括缓冲区的使用状态、在内核空间的偏移地址、缓冲区长度等,然后应用程序根据这些信息使用mmap把内核空间地址映射到用户空间。
应用层:
struct v4l2_buffer { __u32 index; enum v4l2_buf_type type; __u32 bytesused; __u32 flags; enum v4l2_field field; struct timeval timestamp; struct v4l2_timecode timecode; __u32 sequence; /* memory location */ enum v4l2_memory memory; union { __u32 offset; unsigned long userptr; } m; __u32 length; __u32 input; __u32 reserved; }; v4l2_buffer buf; buf.index = i; buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; ret = ioctl(fd , VIDIOC_QUERYBUF, &buf); if(ret < 0) { LOG("VIDIOC_QUERYBUF (%d) failed (%d) ", i, ret); return ret; }
驱动层:
ops->vidioc_querybuf(file, fh, p); static int vidioc_querybuf(struct file *file, void *priv, struct v4l2_buffer *p) { struct vivi_dev *dev = video_drvdata(file); return vb2_querybuf(&dev->vb_vidq, p); } int vb2_querybuf(struct vb2_queue *q, struct v4l2_buffer *b) { struct vb2_buffer *vb; // 取出 buf vb = q->bufs[b->index]; // 将 buf 信息写回用户空间传递的 b return __fill_v4l2_buffer(vb, b); } static int __fill_v4l2_buffer(struct vb2_buffer *vb, struct v4l2_buffer *b) { struct vb2_queue *q = vb->vb2_queue; int ret; /* Copy back data such as timestamp, flags, input, etc. */ memcpy(b, &vb->v4l2_buf, offsetof(struct v4l2_buffer, m)); b->input = vb->v4l2_buf.input; b->reserved = vb->v4l2_buf.reserved; if (V4L2_TYPE_IS_MULTIPLANAR(q->type)) { ret = __verify_planes_array(vb, b); if (ret) return ret; /* * Fill in plane-related data if userspace provided an array * for it. The memory and size is verified above. */ memcpy(b->m.planes, vb->v4l2_planes, b->length * sizeof(struct v4l2_plane)); if (q->memory == V4L2_MEMORY_DMABUF) { unsigned int plane; for (plane = 0; plane < vb->num_planes; ++plane) b->m.planes[plane].m.fd = 0; } } else { /* * We use length and offset in v4l2_planes array even for * single-planar buffers, but userspace does not. */ b->length = vb->v4l2_planes[0].length; b->bytesused = vb->v4l2_planes[0].bytesused; if (q->memory == V4L2_MEMORY_MMAP) b->m.offset = vb->v4l2_planes[0].m.mem_offset; else if (q->memory == V4L2_MEMORY_USERPTR) b->m.userptr = vb->v4l2_planes[0].m.userptr; else if (q->memory == V4L2_MEMORY_DMABUF) b->m.fd = 0; } /* * Clear any buffer state related flags. */ b->flags &= ~V4L2_BUFFER_STATE_FLAGS; switch (vb->state) { case VB2_BUF_STATE_QUEUED: case VB2_BUF_STATE_ACTIVE: b->flags |= V4L2_BUF_FLAG_QUEUED; break; case VB2_BUF_STATE_ERROR: b->flags |= V4L2_BUF_FLAG_ERROR; /* fall through */ case VB2_BUF_STATE_DONE: b->flags |= V4L2_BUF_FLAG_DONE; break; case VB2_BUF_STATE_PREPARED: b->flags |= V4L2_BUF_FLAG_PREPARED; break; case VB2_BUF_STATE_DEQUEUED: /* nothing */ break; } if (__buffer_in_use(q, vb)) b->flags |= V4L2_BUF_FLAG_MAPPED; return 0; }
2.7 mmap
应用层:
v4l2_buffer framebuf[] framebuf[i].length = buf.length; framebuf[i].start = (char *) mmap( NULL, // 欲指向内存的起始地址,一般为NULL,表示系统自动分配 buf.length, //映射长度 PROT_READ|PROT_WRITE, //可读可写 MAP_SHARED, //对映射区的读写会写回内核空间,而且允许其它映射该内核空间地址的进程共享 fd, buf.m.offset ); if (framebuf[i].start == MAP_FAILED) { LOG("mmap (%d) failed: %s ", i, strerror(errno)); return -1; }
驱动层:
static int vivi_mmap(struct file *file, struct vm_area_struct *vma) { struct vivi_dev *dev = video_drvdata(file); int ret; ret = vb2_mmap(&dev->vb_vidq, vma);//核心层提供的函数 return ret; }
2.8 VIDIOC_QBUF
投放一个空的视频缓冲区到视频缓冲区输入队列,执行成功后,在启动视频设备拍摄图像时,相应的视频数据被保存到视频输入队列相应的视频缓冲区中。
应用层:
ret = ioctl(fd , VIDIOC_QBUF, &buf); if (ret < 0) { LOG("VIDIOC_QBUF (%d) failed (%d) ", i, ret); return -1;
驱动层:
static int vidioc_qbuf(struct file *file, void *priv, struct v4l2_buffer *p) { struct vivi_dev *dev = video_drvdata(file); return vb2_qbuf(&dev->vb_vidq, p); } int vb2_qbuf(struct vb2_queue *q, struct v4l2_buffer *b) { struct rw_semaphore *mmap_sem = NULL; struct vb2_buffer *vb; int ret = 0; vb = q->bufs[b->index]; switch (vb->state) { case VB2_BUF_STATE_DEQUEUED: ret = __buf_prepare(vb, b); } // 将这个 buffer 挂入 q->queued_list list_add_tail(&vb->queued_entry, &q->queued_list); vb->state = VB2_BUF_STATE_QUEUED; if (q->streaming) __enqueue_in_driver(vb); /* Fill buffer information for the userspace */ __fill_v4l2_buffer(vb, b); unlock: if (mmap_sem) up_read(mmap_sem); return ret; }
实质上就是取出一个 vb2_buffer 挂入 vivi_dev->vb_vidq->queued_list
2.9 VIDIOC_STREAMON
应用层:
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE; ret = ioctl(fd, VIDIOC_STREAMON, &type); if (ret < 0) { LOG("VIDIOC_STREAMON failed (%d) ", ret); return ret; }
驱动层:
static int vidioc_streamon(struct file *file, void *priv, enum v4l2_buf_type i) { struct vivi_dev *dev = video_drvdata(file); return vb2_streamon(&dev->vb_vidq, i); } int vb2_streamon(struct vb2_queue *q, enum v4l2_buf_type type) { struct vb2_buffer *vb; int ret; vb->state = VB2_BUF_STATE_ACTIVE; // 在 queued_list 链表中取出每一个 buffer 调用buffer queue,对于vivi来说就是放入 vidq->active 链表 list_for_each_entry(vb, &q->queued_list, queued_entry) __enqueue_in_driver(vb); ret = call_qop(q, start_streaming, q, atomic_read(&q->queued_count)); q->streaming = 1; return 0; } static void __enqueue_in_driver(struct vb2_buffer *vb) { struct vb2_queue *q = vb->vb2_queue; vb->state = VB2_BUF_STATE_ACTIVE; /* sync buffers */ for (plane = 0; plane < vb->num_planes; ++plane) call_memop(q, prepare, vb->planes[plane].mem_priv); q->ops->buf_queue(vb);// list_add_tail(&buf->list, &vidq->active); } static int start_streaming(struct vb2_queue *vq, unsigned int count) { struct vivi_dev *dev = vb2_get_drv_priv(vq); dprintk(dev, 1, "%s ", __func__); return vivi_start_generating(dev); } static int vivi_start_generating(struct vivi_dev *dev) { struct vivi_dmaqueue *dma_q = &dev->vidq; /* Resets frame counters */ dev->ms = 0; dev->mv_count = 0; dev->jiffies = jiffies; dma_q->frame = 0; dma_q->ini_jiffies = jiffies; // 创建一个内核线程,入口函数 vivi_thread dma_q->kthread = kthread_run(vivi_thread, dev, dev->v4l2_dev.name); /* Wakes thread */ wake_up_interruptible(&dma_q->wq); return 0; } static int vivi_thread(void *data) { struct vivi_dev *dev = data; dprintk(dev, 1, "thread started "); set_freezable(); for (;;) { vivi_sleep(dev); if (kthread_should_stop()) break; } dprintk(dev, 1, "thread: exit "); return 0; } static void vivi_sleep(struct vivi_dev *dev) { struct vivi_dmaqueue *dma_q = &dev->vidq; int timeout; DECLARE_WAITQUEUE(wait, current); add_wait_queue(&dma_q->wq, &wait); if (kthread_should_stop()) goto stop_task; /* Calculate time to wake up */ timeout = msecs_to_jiffies(frames_to_ms(1)); vivi_thread_tick(dev); schedule_timeout_interruptible(timeout); stop_task: remove_wait_queue(&dma_q->wq, &wait); try_to_freeze(); }
每次调用 vivi_sleep 这个线程都被挂入等待队列,调用 vivi_thread_tick 填充数据,然后休眠指定的时间自动唤醒,一直循环下去。这样就生成了一帧一帧的视频数据。
static void vivi_thread_tick(struct vivi_dev *dev) { struct vivi_dmaqueue *dma_q = &dev->vidq; struct vivi_buffer *buf; unsigned long flags = 0; spin_lock_irqsave(&dev->slock, flags); buf = list_entry(dma_q->active.next, struct vivi_buffer, list); list_del(&buf->list); spin_unlock_irqrestore(&dev->slock, flags); do_gettimeofday(&buf->vb.v4l2_buf.timestamp); /* 填充Buffer */ vivi_fillbuff(dev, buf); vb2_buffer_done(&buf->vb, VB2_BUF_STATE_DONE); } void vb2_buffer_done(struct vb2_buffer *vb, enum vb2_buffer_state state) { struct vb2_queue *q = vb->vb2_queue; unsigned long flags; unsigned int plane; /* sync buffers */ for (plane = 0; plane < vb->num_planes; ++plane) call_memop(q, finish, vb->planes[plane].mem_priv); /* Add the buffer to the done buffers list */ spin_lock_irqsave(&q->done_lock, flags); vb->state = state; list_add_tail(&vb->done_entry, &q->done_list); atomic_dec(&q->queued_count); #ifdef CONFIG_SYNC sw_sync_timeline_inc(q->timeline, 1); #endif spin_unlock_irqrestore(&q->done_lock, flags); /* 应用程序select 时 poll_wait 里休眠,现在有数据了唤醒 */ wake_up(&q->done_wq); }
开始的时候我们将以一个 vb_buffer 挂入 vb_vidq->queued_list ,当启动视频传输之后,它被取出挂入 vb_vidq->vidq->active 队列,然后在内核线程中每一个 tick ,又将它取出填充视频数据之后,再挂入 vb_vidq->done_list ,唤醒正在休眠等待视频数据的应用程序。
2.10 select
驱动层:
vivi_poll(struct file *file, struct poll_table_struct *wait) { struct vivi_dev *dev = video_drvdata(file); struct vb2_queue *q = &dev->vb_vidq; return vb2_poll(q, file, wait); }
unsigned int vb2_poll(struct vb2_queue *q, struct file *file, poll_table *wait) { // 挂入休眠队列,是否休眠还要看返回值,大概没有数据就休眠,有数据就不休眠 poll_wait(file, &q->done_wq, wait); if (!list_empty(&q->done_list)) vb = list_first_entry(&q->done_list, struct vb2_buffer, done_entry); spin_unlock_irqrestore(&q->done_lock, flags); if (vb && (vb->state == VB2_BUF_STATE_DONE || vb->state == VB2_BUF_STATE_ERROR)) { return (V4L2_TYPE_IS_OUTPUT(q->type)) ? res | POLLOUT | POLLWRNORM : res | POLLIN | POLLRDNORM; } return res; }
唤醒之后,我们就可以去从视频输出队列中取出buffer,然后根据映射关系,在应用空间取出视频数据了
2.11 VIDIOC_DQBUF
应用层:
ret = ioctl(fd, VIDIOC_DQBUF, &buf); if (ret < 0) { LOG("VIDIOC_DQBUF failed (%d) ", ret); return ret; } static int vidioc_dqbuf(struct file *file, void *priv, struct v4l2_buffer *p) { struct vivi_dev *dev = video_drvdata(file); return vb2_dqbuf(&dev->vb_vidq, p, file->f_flags & O_NONBLOCK); } int vb2_dqbuf(struct vb2_queue *q, struct v4l2_buffer *b, bool nonblocking) { struct vb2_buffer *vb = NULL; int ret; // 等待在 q->done_list 取出第一个可用的 buffer ret = __vb2_get_done_vb(q, &vb, nonblocking); ret = call_qop(q, buf_finish, vb); /* 写回buffer的信息到用户空间,应用程序找个这个buffer的mmap之后的地址读数据 */ __fill_v4l2_buffer(vb, b); /* Remove from videobuf queue */ list_del(&vb->queued_entry); vb->state = VB2_BUF_STATE_DEQUEUED; return 0; } static int __vb2_get_done_vb(struct vb2_queue *q, struct vb2_buffer **vb,int nonblocking) { unsigned long flags; int ret; /* * Wait for at least one buffer to become available on the done_list. */ ret = __vb2_wait_for_done_vb(q, nonblocking); spin_lock_irqsave(&q->done_lock, flags); *vb = list_first_entry(&q->done_list, struct vb2_buffer, done_entry); list_del(&(*vb)->done_entry); spin_unlock_irqrestore(&q->done_lock, flags); return 0; } static int buffer_finish(struct vb2_buffer *vb) { struct vivi_dev *dev = vb2_get_drv_priv(vb->vb2_queue); dprintk(dev, 1, "%s ", __func__); return 0; }