对于矩形碰撞,很多人都知道。但面对多边形图形,大多数采用多矩形覆盖的方式。
但是我不是很喜欢这种方式,我所采用的是利用一个经典算法:
SAT 一种可以快速检测不规则的凸多边形是否碰撞的算法
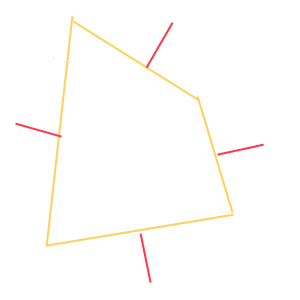
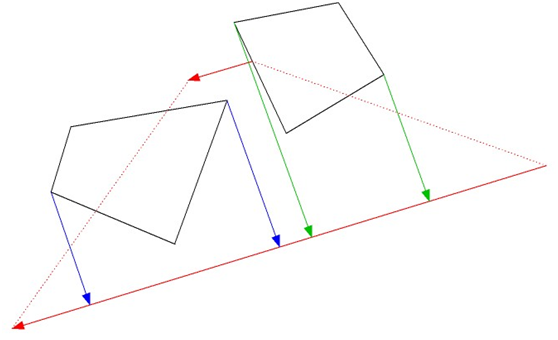
给出两个凸多边形体,如果我们能找到一个轴线,使两物体在此轴线上的投影不重叠,则这两个物体之间没有发生碰撞,这个轴线叫做Separating Axis(红色轴线)。
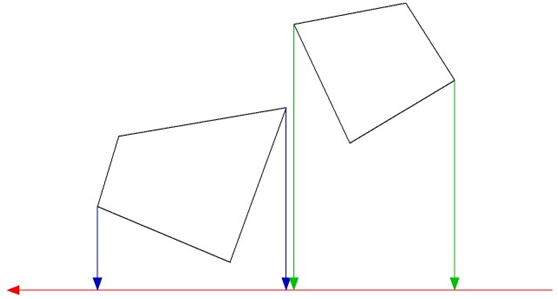
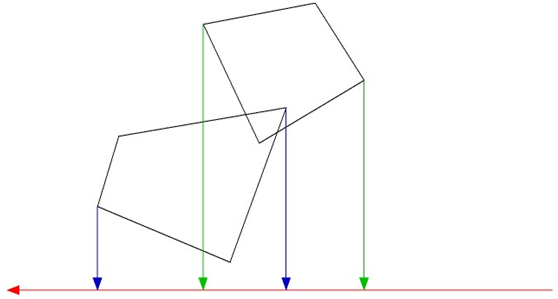
对于2D来说,红色线就是垂直与多边形边的轴。
因此,如果我们要检查两多边形是否碰撞,就去检查两多边形在每个所有可能的轴上的投影是否重叠。
/// <summary>
/// 检测2个矩形是否发生碰撞
/// </summary>
/// <returns></returns>
public static bool IsIntersect (Vector2[] A, Vector2[] B)
{
Vector2 AX, AY, BX, BY;
AX = new Vector2();
AY = new Vector2();
BX = new Vector2();
BY = new Vector2();
AX.X = A[0].X - A[1].X;
AX.Y = A[0].Y - A[1].Y;
AY.X = A[0].X - A[3].X;
AY.Y = A[0].Y - A[3].Y;
BX.X = B[0].X - B[1].X;
BX.Y = B[0].Y - B[1].Y;
BY.X = B[0].X - B[3].X;
BY.Y = B[0].Y - B[3].Y;
//对于AX上:
if (Tmp(AX, A, B)) return false;
if (Tmp(AY, A, B)) return false;
if (Tmp(BX, A, B)) return false;
if (Tmp(BY, A, B)) return false;
return true;
}
private static bool Tmp(Vector2 IS,Vector2[] A,Vector2[] B)
{
float[] v = new float[4];
for (int i = 0; i < 4; i++)
{
float tmp = (IS.X * A[i].X + IS.Y * A[i].Y) / (IS.X * IS.X + IS.Y * IS.Y);
v[i] = tmp * IS.X * IS.X + tmp * IS.Y * IS.Y;
}
float[] vv = new float[4];
for (int i = 0; i < 4; i++)
{
float tmp = (IS.X * B[i].X + IS.Y * B[i].Y) / (IS.X * IS.X + IS.Y * IS.Y);
vv[i] = tmp * IS.X * IS.X + tmp * IS.Y * IS.Y;
}
if (Math.Max(Math.Max(v[0], v[1]),Math.Max(v[2],v[3])) >Math.Min(Math.Min(vv[0],vv[1]),Math.Min(vv[2],vv[3])) && Math.Min(Math.Min(v[0],v[1]),Math.Min(v[2],v[3])) < Math.Max(Math.Max(vv[0],vv[1]),Math.Max(vv[2],vv[3]))) {
return false;
}//表示暂时不知道是否碰撞
else return true;//表示知道未碰撞
}
/// </summary>
/// <returns></returns>
public static bool IsIntersect (Vector2[] A, Vector2[] B)
{
Vector2 AX, AY, BX, BY;
AX = new Vector2();
AY = new Vector2();
BX = new Vector2();
BY = new Vector2();
AX.X = A[0].X - A[1].X;
AX.Y = A[0].Y - A[1].Y;
AY.X = A[0].X - A[3].X;
AY.Y = A[0].Y - A[3].Y;
BX.X = B[0].X - B[1].X;
BX.Y = B[0].Y - B[1].Y;
BY.X = B[0].X - B[3].X;
BY.Y = B[0].Y - B[3].Y;
//对于AX上:
if (Tmp(AX, A, B)) return false;
if (Tmp(AY, A, B)) return false;
if (Tmp(BX, A, B)) return false;
if (Tmp(BY, A, B)) return false;
return true;
}
private static bool Tmp(Vector2 IS,Vector2[] A,Vector2[] B)
{
float[] v = new float[4];
for (int i = 0; i < 4; i++)
{
float tmp = (IS.X * A[i].X + IS.Y * A[i].Y) / (IS.X * IS.X + IS.Y * IS.Y);
v[i] = tmp * IS.X * IS.X + tmp * IS.Y * IS.Y;
}
float[] vv = new float[4];
for (int i = 0; i < 4; i++)
{
float tmp = (IS.X * B[i].X + IS.Y * B[i].Y) / (IS.X * IS.X + IS.Y * IS.Y);
vv[i] = tmp * IS.X * IS.X + tmp * IS.Y * IS.Y;
}
if (Math.Max(Math.Max(v[0], v[1]),Math.Max(v[2],v[3])) >Math.Min(Math.Min(vv[0],vv[1]),Math.Min(vv[2],vv[3])) && Math.Min(Math.Min(v[0],v[1]),Math.Min(v[2],v[3])) < Math.Max(Math.Max(vv[0],vv[1]),Math.Max(vv[2],vv[3]))) {
return false;
}//表示暂时不知道是否碰撞
else return true;//表示知道未碰撞
}
其中需要的参数为矩形的四个点坐标(一共八个点),矩形四个点坐标要求按顺序(顺时针或者逆时针都可以)传入。(因为项目中不涉及超过四个以上顶点的检测,所以只实现了矩形的检测。)