一.问题
椅子四条腿的椅脚连线呈长方形能在不平的地面上放稳吗?
二.问题分析
经过分析,可以用变量表示椅子的位置,用函数表示椅子四脚与地面的距离,进而用数学语言把模型假设和椅脚同时着地表达出来.
三模型假设
(1)椅子四条腿一样长,椅脚与地面接触处视为一点,四脚的连线呈长方形.
(2)地面高度是连续变化的,沿周围任意方向都不会出现间断 (高度突变),即地面是连续曲面.这个假设相当于给出了椅子能放稳的必要条件.
(3)椅子在任何位置至少有三只脚同时着地.为保证这一点,要求对于椅脚的间距和椅腿的长度而言,地面是相对平坦的.因为在地面上与椅脚间距和椅腿长度的尺寸大小相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是无法同时着地的.
四、模型建立
综上可知,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来.
首先,引入合适的变量表示椅子位置的平移或旋转变换.其实平移椅子后问题的参数没有发生本质变化,所以将椅子就地旋转,找到椅子能放稳的条件.
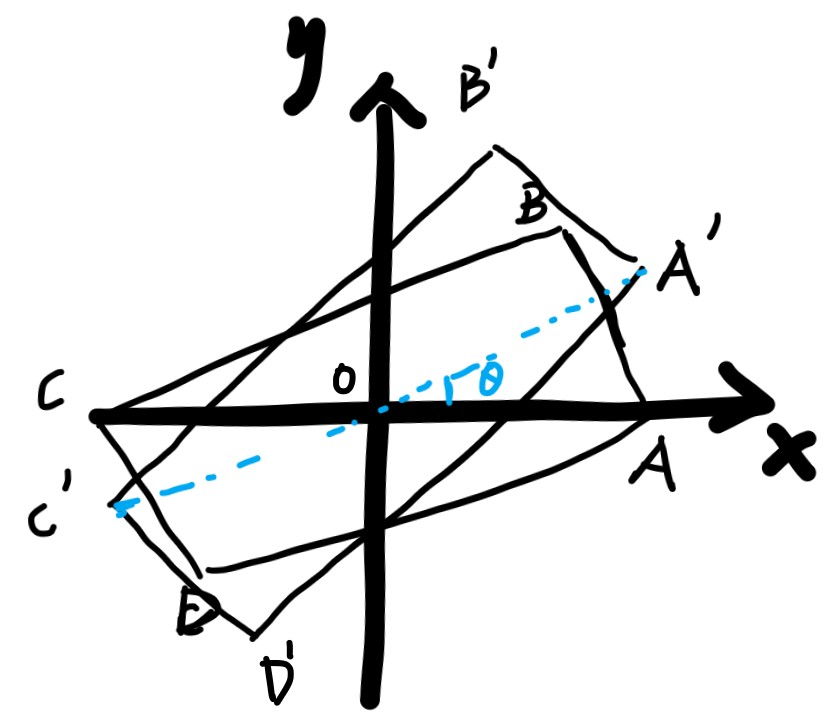
注意到椅脚连线呈长方形,是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地.把长方形绕它的对称中心O旋转,这可以表示椅子位置的改变。于是,旋转角度θ这一变量就表示了椅子的位置.建立直角坐标系来解决问题.
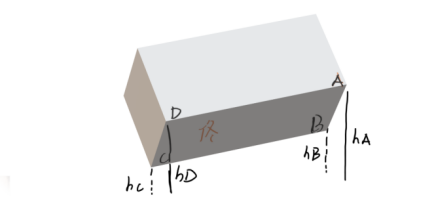
如下图所示,设椅脚连线为长方形ABCD,以对角线AC所在的直线为x轴,对称中心O为原点,建立平面直角坐标系.椅子绕O点沿逆时针方向旋转角度θ后,长方形ABCD转至A’B’C’D’的位置,这样就可以用旋转角θ(0≤θ≤π)表示出椅子绕点O旋转θ后的位置.
其次,把椅脚是否着地用数学形式表示出来.
我们知道,当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地.由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数.
因为椅子四只脚与地面的竖直距离有四个θ相关的函数.而由假设(3)可知,椅子在任何位置至少有三只脚同时着地,即这四个函数函数值对于任意角度θ至少有三个同时为0.因此,只需引入两个距离函数即可.考虑到长方形ABCD是中心对称图形,绕其对称中心O沿逆时针方向旋转180°后,长方形位置不变,但A,C和B,D对换了.
因此,记 A、B两脚与地面竖直距离之和为f(θ),C、D两脚与地面竖直距离之和为g(θ),其中θ∈[0,π],从而将原问题数学化。
数学模型:已知f(θ)和g(θ)是θ的非负连续函数,对∀θ,f(θ)•g(θ)=0,证明:∃θ0∈[0,π],使得f(θ0)=g(θ0)=0成立。
五、模型求解
①若f(0)=g(0)=0,那么结论成立。
②若f(0)与g(0)不同时为零,不妨设f(0)>0,g(0)=0。将长方形ABCD绕点O逆时针旋转角度π后,A,B与C,D互换,但长方形ABCD在地面上所处的位置不变,由此可知,f(π)=g(0),g(π)=f(0).∴f(0)>0,g(0)=0 → g(π)>0,f(π)=0。
令h(θ)=f(θ)-g(θ),由f(θ)和g(θ)的连续性知h(θ)也是连续函数。
又h(0)=f(0)-g(0)>0,h(π)=f(π)-g(π)<0,
根据连续函数介值定理,必存在θ0∈(0,π)使得h(θ0)=0,即f(θ0)=g(θ0) ;
又因为f(θ0)•g(θ0)=0,
所以f(θ0)=g(θ0)=0。即四只脚同时着地,稳定。