知识回顾
1:首先引入一些便于稍后讨论的新标记方法:
假设神经网络的训练样本有m个,每个包含一组输入x和一组输出信号y,L表示神经网络的层数,S表示每层输入的神经元的个数,SL代表最后一层中处理的单元个数。
之前,我们所讲到的,我们可以把神经网络的定义分为2类:
1)二元分类:SL = 1,其中y = 1 或 0
2)多元分类:当有K中分类时候,SL = K,其中yi = 1表示分到第i类(k>2)
2:再让我们回顾之前所讲到的逻辑回归问题中的代价函数

在逻辑回归中,我们只有一个输出变量,但是再神经网络问题中,我们可以有多个输出变量,因此h函数是一个k维的向量(hΘ(x)∈R^k),并且我们训练集中的因变量是一个同等维度的向量,因此代价函数为
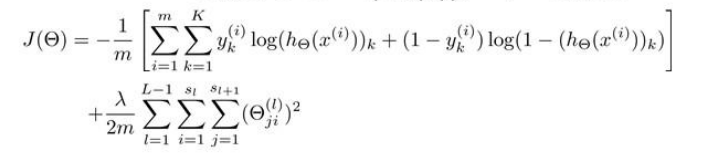
这个函数和之前的逻辑回归基本相同,不同之处是对于每一个特征,我们都会给出一个预测,基本上对每一个特征预测K个不同的结果,然后利用循环在K个预测中我们选择可能性最高的一个,将其与y中的实际数据进行比较。
归一化的那一项只是排除每一层Θ0后,每一层的Θ矩阵和最里层的循环j循环所有的行,循环i则循环所有的列。
即:hΘ(x)与真实值之间的距离为每个样本-每个类输出的加和,对参数进行正则化的偏置项处理所有参数的平方和。
反向传播算法的介绍
反向传播(英语:Backpropagation,缩写为BP)是“误差反向传播”的简称,是一种与最优化方法(如梯度下降法)结合使用的,用来训练人工神经网络的常见方法。该方法计算对网络中所有权重计算损失函数的梯度。这个梯度会反馈给最优化方法,用来更新权值以最小化损失函数。反向传播要求有对每个输入值想得到的已知输出,来计算损失函数梯度。因此,它通常被认为是一种监督式学习方法,虽然它也用在一些无监督网络(如自动编码器)中。它是多层前馈网络的Delta规则的推广,可以用链式法则对每层迭代计算梯度。反向传播要求人工神经元(或“节点”)的激励函数可微。
之前,我们在神经网络预测结果的时候,我们采用了一种正向传播的方法,我们从第一层开始,依次计算,直到算出最后一层的hΘ(x)。现在,为了计算出代价函数的偏导数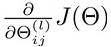 ,我们需要采用一种反向传播的方法,来计算出网络中所有权重计算损失函数的梯度,也就是,我们首先计算出最后一层的误差,然后再一层层的反向求出上一次层的误差,直到第二层结束。
,我们需要采用一种反向传播的方法,来计算出网络中所有权重计算损失函数的梯度,也就是,我们首先计算出最后一层的误差,然后再一层层的反向求出上一次层的误差,直到第二层结束。
例如,我们现在有训练集合{x(1),y(1)},我们的神经网络是一个四层的神经网络,其中K = 4,SL = 4,L =4;
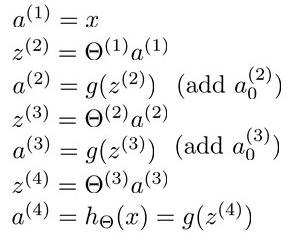
我们首先用向前传播的方法计算出hΘ(x)。
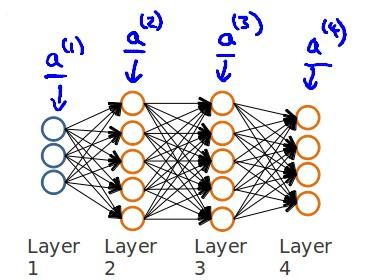
如图所示:
我们在计算的误差时,误差的激活单元的预测a(4)与实际值y(k)之间的误差k = 1:K。
若我们用δ来表示误差,则δ(4) = a(4) - y
向前推:
其中g‘(z(3))是s形函数的导数,即就是g’(z(3))= a(3).*(1-a(3))。而Θ(3)T δ(4)则是权重导致的误差的和。接下来同理计算第二层的误差 。
。
因为第一层是输入变量,所有没有误差。
这时我们有了所有误差的表达式,这时候就可以计算代价函数的偏导数了,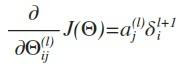
其中l代表目前计算的层数,j代表目前计算的激励单元的下标,即就是下一层的第j个输入变量的下标。i代表下一层中误差单元的下标,即就是收到权重矩阵中第i行影响的下一层中个的误差单元的下标。
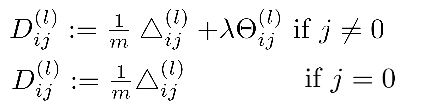
如果我们这时候再考虑归一化的处理,就需要计算每一层的误差单元的偏导数,计算每一层的误差单元。但是我们需要为整个训练集计算误差单元,此时的误差单元就是一个矩阵,我用△ (l)ij表示第l层的第i个激励单元受到第j个参数的影响而导致的误差。
算法表示为
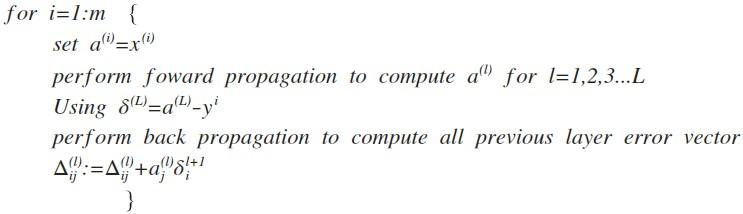
即首先用正向传播算法计算出每一层的激励单元,利用训练集的结果与神经网络预测的结果求出最后一层的误差,然后反向的计算出前一层的误差,直到第二层。在求出 △ (l)ij后,我们就可以就按代价函数的偏导数了。
在octave中,我们要用fminuc来求出权重矩阵,我们就需要将矩阵展开为向量,再利用算法求出最优解,然后转换回矩阵,假设我们有三个权重的矩阵,可以用reshape函数实现。
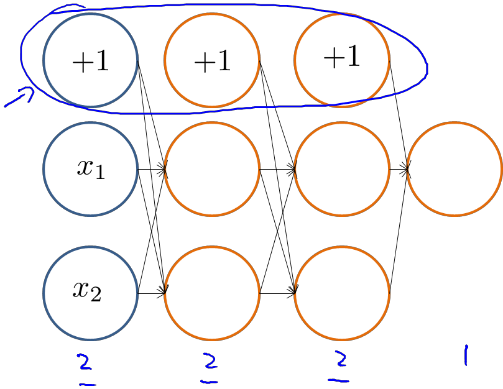
为了更加直观的理解反向传播算法,我们举一个栗子,加入我有如图所示的神经网络结构:
我们可以得出
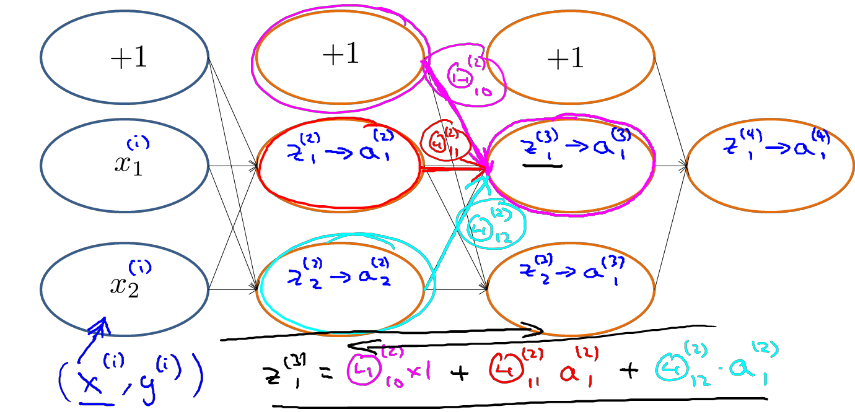
根据正向传播方法,我们可以得出z1(3)的结果。
反向传播算法可以总结为两个步骤
step1:
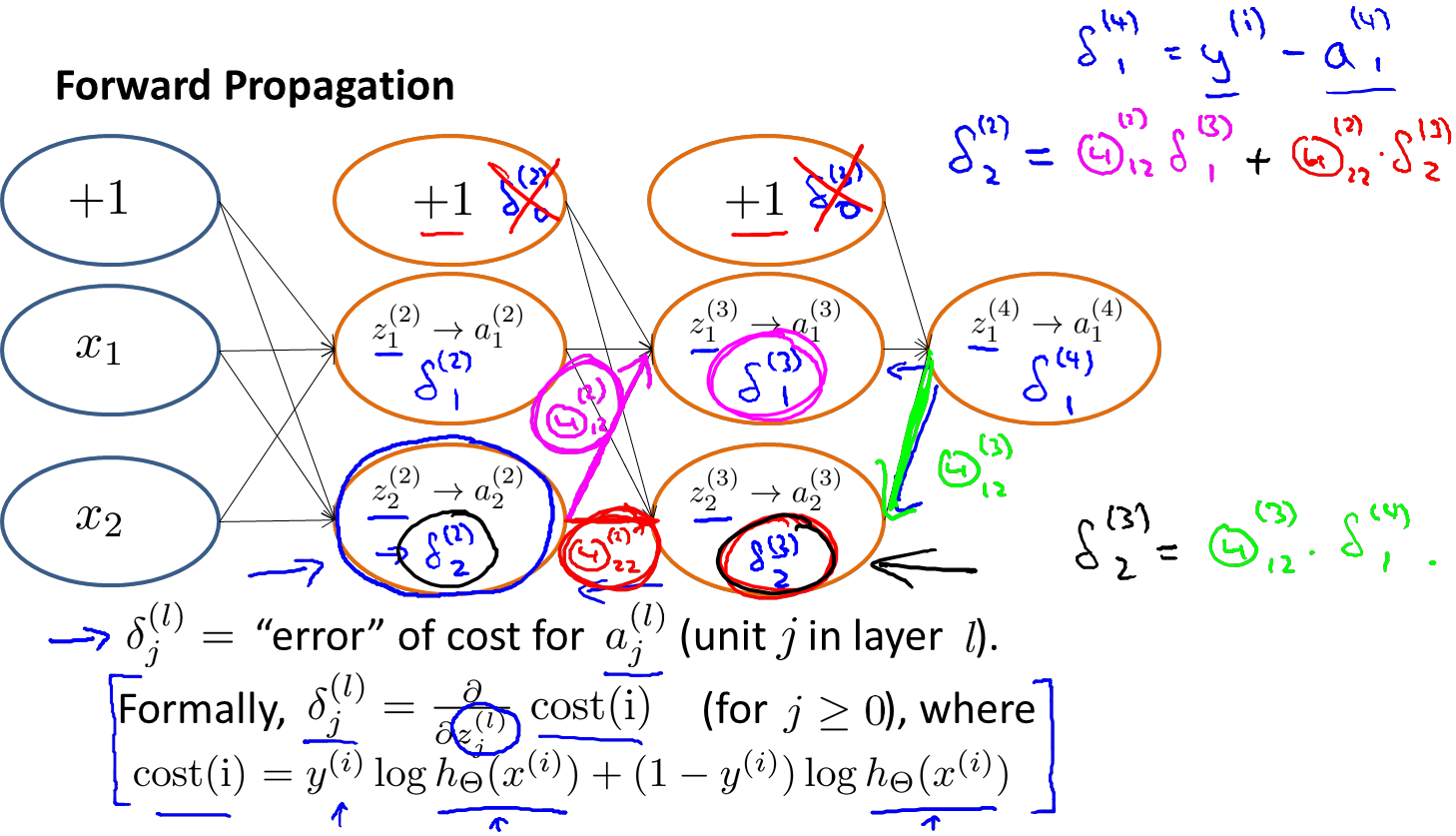
计算这些δ(i)j项,可以看做是激励值的误差,a(l)j(表示第l层中的第j项)
δ(i)j = “error”of cost for a(l)j
step2:
δ(i)j 是关于z(l)j的偏微分
初始化网络权值(通常是小的随机值)
do
forEach 训练样本 ex
prediction = neural-net-output(network, ex) // 正向传递
actual = teacher-output(ex)
计算输出单元的误差 (prediction - actual)
计算
Delta w_{h} 对于所有隐藏层到输出层的权值 // 反向传递
计算
Delta w_{i} 对于所有输入层到隐藏层的权值 // 继续反向传递
更新网络权值 // 输入层不会被误差估计改变
until 所有样本正确分类或满足其他停止标准
return 该网络
对这该算法的数学理解是 代价函数关于中间项的偏微分,他们度量着对神经网络中的权值做多少的改变,对中间计算量的影响。
δ(4)1 = y(i)-a(4)1
例如,现在需要计算δ(2)2
根据上图,我们可以得出和δ(2)2有关系的参数是Θ(2)1 2->z(3)1 ->a(3)1-Θ(3)1 1->z(4)1->a(4)1 以及参数Θ(2)2 2 ->z(3)2->a(3)2-Θ(3)1 2->z(4)1->a(4)1 则 δ(2)2 = Θ(2)1 2 δ(3)1 + Θ(2) 2 2δ(3)2
δ(3)2 = Θ(3)1 2 δ(4)1
δ(3)1 = Θ(3)1 1δ(4)1
以上内容是我们怎样用反向传播算法计算代价函数的导数。现在我们需要解决如何吧参数矩阵展开成向量,以便在高级优化步骤中使用。
参数展开
function[jVal,gradient] = cost Function(theta) ... optTheta = fminunc(@costFunction,initialTheta,options)
当我们假设L = 4时,Θ(1),Θ(2),Θ(3) = matrices(Theta1,Theta2,Theta3)
D(1),D(2),D(3) = matrices(Theta1,Theta2,Theta3)
eg1:
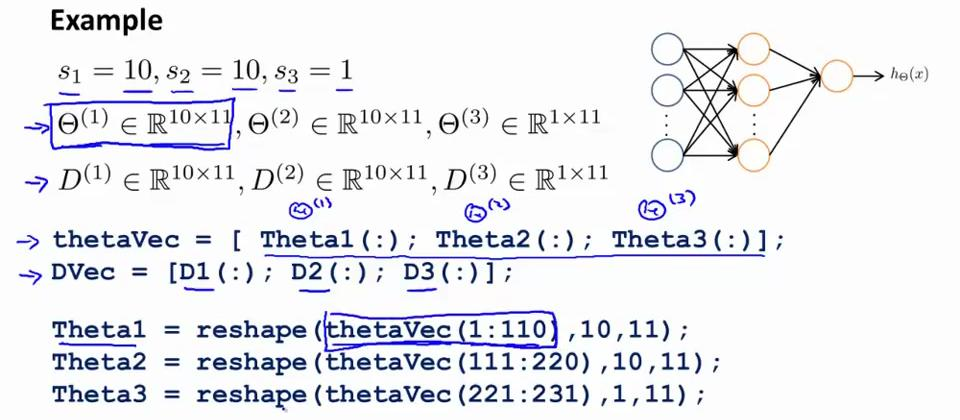
eg2:假设有初始参数值Θ(1),Θ(2),Θ(3),我们选取这些参数展开成一个长向量,称作"initialtheta",作为参数传入fminunc,步骤如下:
step1:用thetaVec重组Θ(1)Θ(2)Θ(3) 此处调用reshape函数
step2:正向传播/反向传播,得到D(1),D(2),D(3)和J(Θ)
step3:取出导数值D(1),D(2),D(3),展开与0相同的顺序,得到gradientVec