步骤:
1.定义检测器
2.检测关键点
3.提取描述子
设立mat类
使用feature2d::compute(src,keypoint,descriptors//产生兴趣点的结果是一个矩阵,行数等于关键点容器元素个数)
detectandcompute(image,noarray,keypoint,descriptors)//计算兴趣点与描述子
检测器与描述子可以任意搭配
4.构造匹配器
bfmatcher::
调用该类的match函数
match(descriptors1,descriptors2,matches//dmatch类)
优化
1.交叉检查匹配项:matcher2(norm_l2//度量差距,true//交叉检测标志)
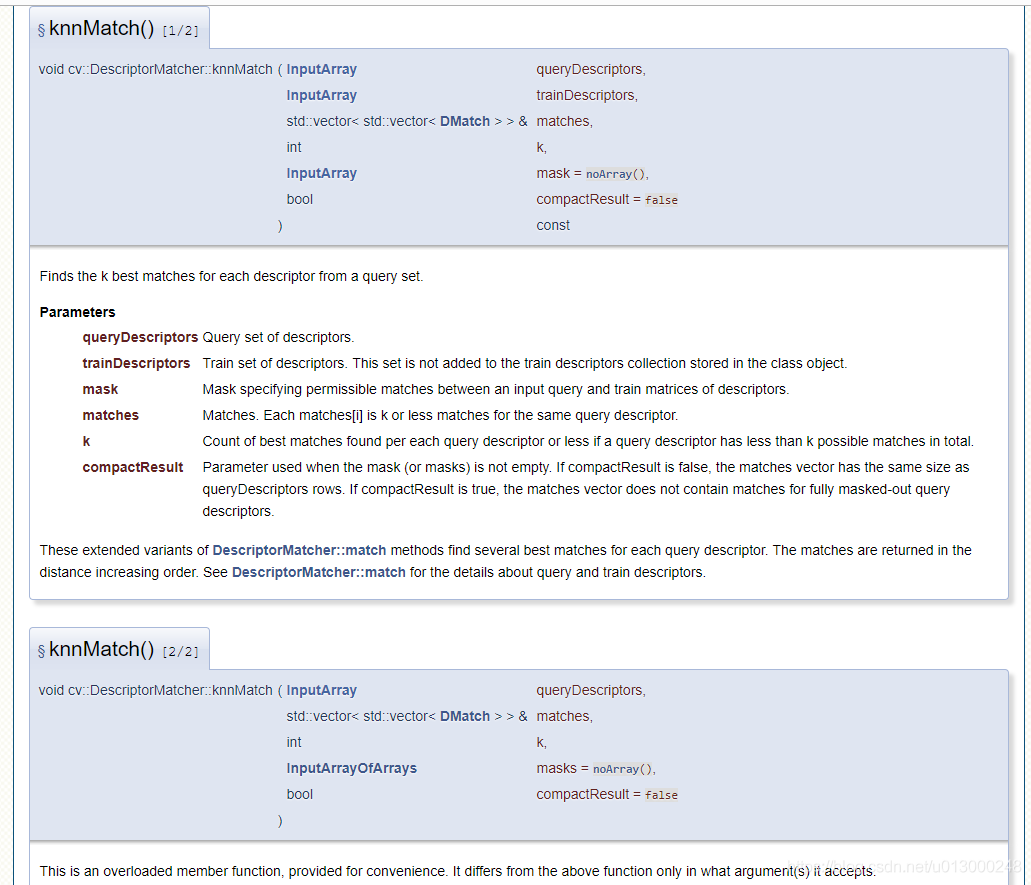
2.比率检验法:在上一个方法基础上,只找到n个最佳匹配项
3.匹配差值阈值化
matcher.radiusmatch(descriptors1,descriptors2,vector<vector<dmatch>> match,maxdist//阈值)
5.匹配两图像的描述子