现代应用程序的很多功能依赖于实时通信技术:
- 聊天
- 实时股票更新
- 现场拍卖
- 体育/新闻实时更新
- 多人游戏
- 位置服务
- 进度条
HTTP通信的核心一直没变,依旧是请求/响应模型,这给实时通信带来了根本性挑战。
多年来,开发者一直在尝试以各种姿势规避HTTP障碍。
我们快速总结流行的几种技术,每种技术都有一个真实的轶事,以便于解释。
定期轮询
带小孩徒步旅行?
孩子们间隔1,2分钟就问:“我们到了吗?”,你的回答干脆友善,但询问/应答会持续出现。
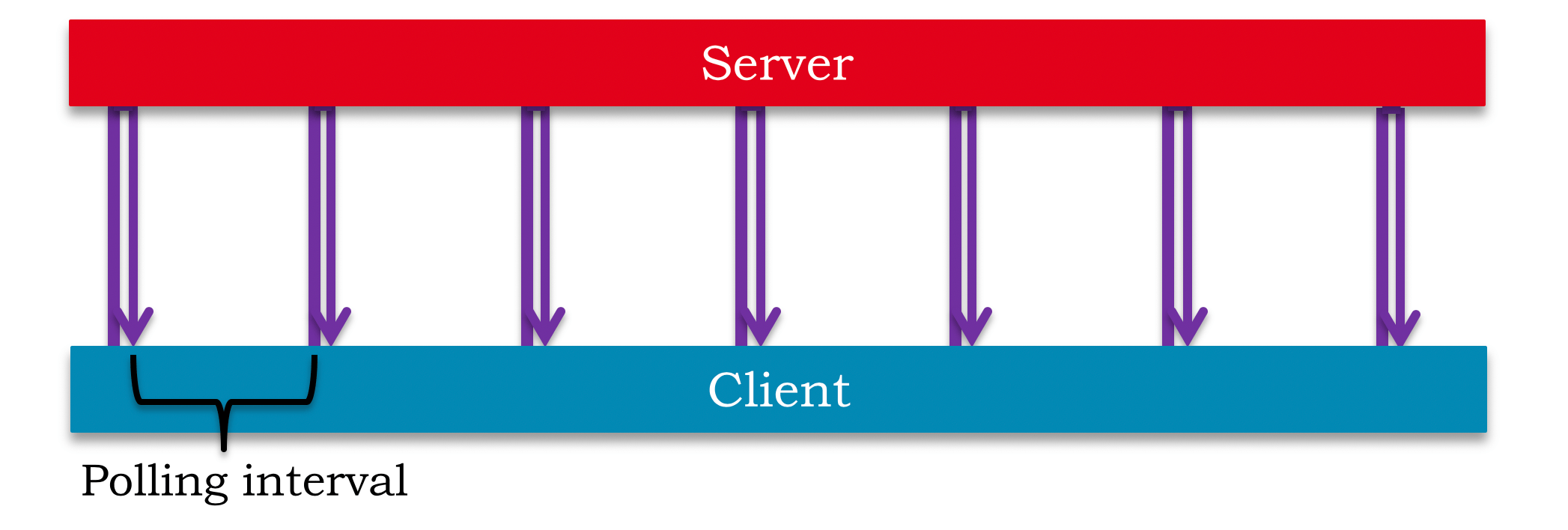
客户端定期询问服务器是否有新信息, 显然这不是实时的,如果轮询间隔足够短,可能会有一点效果。
定期轮询确实会导致客户端-服务器之间反复不必要的往返。
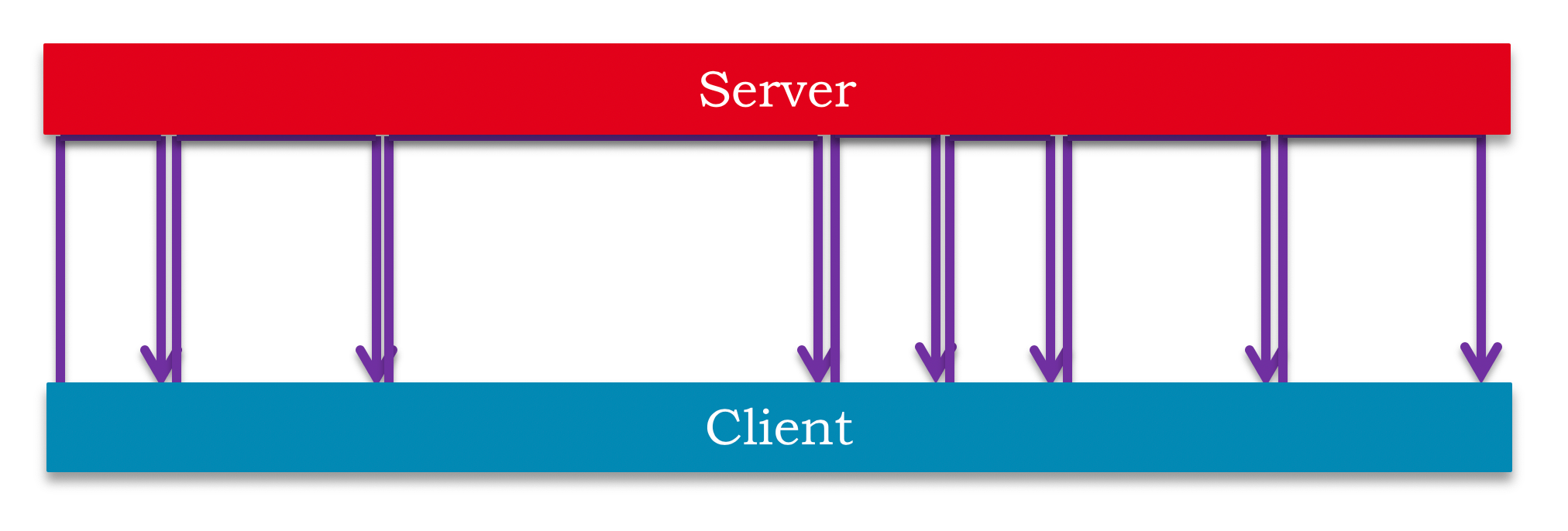
长轮询
与你的孩子开启另一趟徒步旅程。
但这一次,当孩子询问, “我们到了吗?”,你只是保持沉默,一直到下一站(或者发脾气)才做出回应。
长轮询是轮询的一种高级形式,可满足实时通信的需要。
客户端向服务器发出信息请求,服务器hold请求,直到发生值得关注的事情(或请求即将超时)。
于此同时,客户端需要针对响应和超时进行编程,以立即发起另一个请求。这样确保客户端/服务器具有持续的Comet请求以接受实时响应。
长轮询和轮询比起来,明显减少了很多不必要的http请求次数,相比之下节约了资源。长轮询的缺点在于,连接挂起也会导致资源的浪费。
长轮询仍然很流行,但它通常需要在服务器和客户端自定义编程才能成功实现。
服务端发送事件 (SSE)
你在电商上购物,勾选了推送复选框。
之后你每天都会收到三次营销邮件。
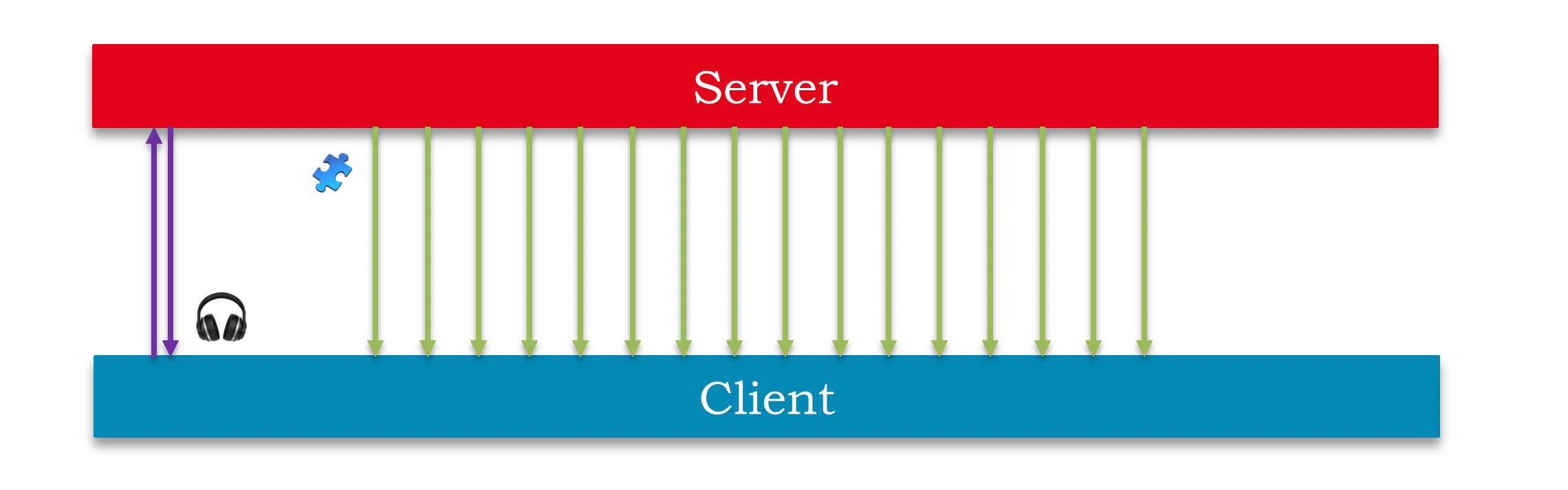
SSE是HTML5 新增的功能,SSE最大的特点就是不需要客户端发送请求,可以实现只要服务器端数据有更新,就可以马上发送到客户端。
SSE很大程度上是从服务器到客户端的定向推送,客户端使用EventSource对象(HTML5标准)捕获来自服务器的流式通知。
WebSockets
你首次去国外旅行,一旦与对方确认了语言,后续沟通就无障碍。

WebSockets依赖于http1.1的持久连接机制,WebSockets握手阶段需要http,连接一旦建立,客户端和服务器端就处于平等的地位,可以全双工通信,不存在请求和响应的区别。
以上技术可以解决HTTP障碍并促进实时通信。问题在于,大多数这些技术都需要开发人员的大量工作。
如果有一些框架可以消除通信的复杂性,让开发人员可以专注于构建实时应用程序,那岂不是很好吗?
SignalR是.NET技术栈成熟的实时通信框架。
SignalR为服务器和客户端之间的双向远程过程调用(RPC)提供API,消除了实时通信的复杂性。
SignalR提供了统一的API画布用于连接和客户端管理,以及进行扩展以处理增加的流量。
SignalR使用服务器端集线器的概念来帮助已连接客户端的实时通信和管理。服务器和客户端可以无缝地相互调用方法,这种交互方法是强类型的。
虽然默认使用基于文本的JSON格式,但SignalR还支持Messagepack协议-(二进制数据序列化/反序列化),以提高效率。
》 signalr是微软推出的标准框架, 目前我已知有node,golang的实现。
gRPC
2015年推出的基于HTTP/2,专注于安全、数据压缩、更好的性能和更低的延迟。

gRPC是由Google开发的基于HTTP/2协议实现的高性能通用RPC框架。HTTP/2 的多路复用特性支撑了gRPC的流式传输能力。
开箱即用的gRPC提供了丰富的功能,例如集成身份验证,双向流和流控制。
gRPC自动为各种语言和平台生成跨平台客户端和服务器绑定代码。gRPC服务的定义和信息交换的格式是Protocol Buffers(一种功能强大的二进制序列化/反序列化工具集和语言)。
