RNN
sequence representation
出现原因
他们都只能单独的取处理一个个的输入,前一个输入和后一个输入是完全没有关系的。但是,某些任务需要能够更好的处理序列的信息,即前面的输入和后面的输入是有关系的。比如,当我们在理解一句话意思时,孤立的理解这句话的每个词是不够的,我们需要处理这些词连接起来的整个序列;当我们处理视频的时候,我们也不能只单独的去分析每一帧,而要分析这些帧连接起来的整个序列。
文本信息的表达方式
【文字或者是单词的数量,数据编码的方式】
编码方式
one-hot编码:
但是当文字或者是单词数量变多的时候,该编码方式比较稀疏,维度较高,成本较大
semantic similarity语义相关性
根据一些单词语义的相关性以及相反性来进行连接
添加了batch的表达方式:
【word_num, b , word_vec】
【b , word_num, word_vec】
例子
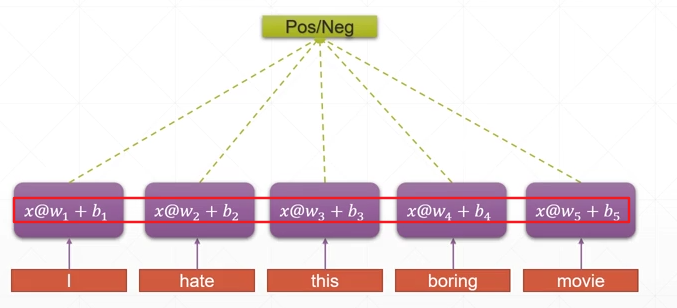
表达 i hate this boring movie
每个单词的表示方法:【100】(假设一共有100个单词)
然后这个句子的表示方法:【5,100】
通过提取每个单词的语义特【2】之后汇总【5,2】来表示这个语义。
缺点:
-
在生活中的小说、一段文字中单词较多,w、b的参数较多
-
没有上下文的语义联系,通过一个单词一个单词进行分析是不高效、不智能的,所以需要存储一个
语境信息
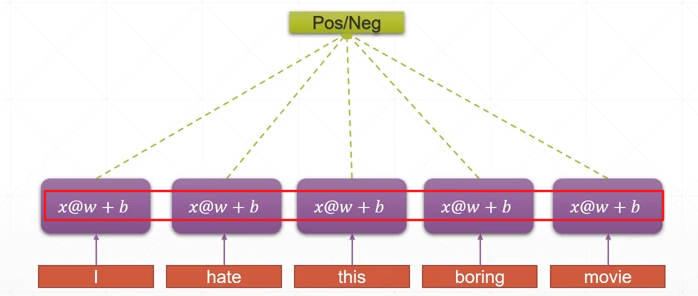
weight sharing
将w、b参数不分为若干个,而是使用一个统一的参数来对整个句子进行分析提取语义特征——weight sharing来解决过多的参数问题
consistent memory
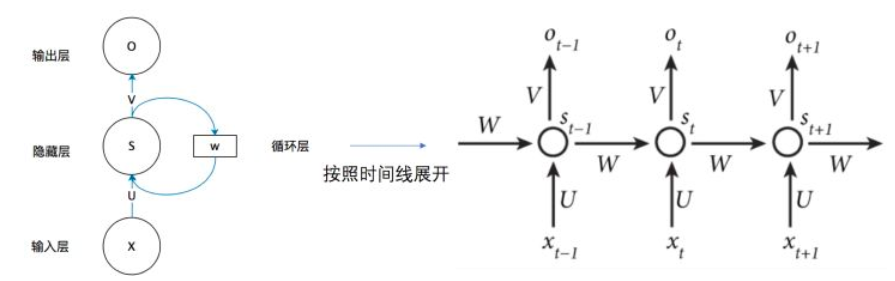
在进行下一个单元的提取的时候,不但要输入这个单元的数据,还要输入上一个单元的语义信息,这样的话就相当于有一个单元一直提供之前的语义信息(在这样的传递下前面的语义信息是在积累的),通过这一次的输入以及上一次的语义信息来进行网络的更新。
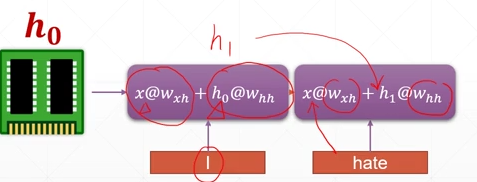
folded model
(其中的(X_t)表示本次的数据特征,(h_0)表示最开始的初始化特征,而(h_t)表示前一次的语义信息)
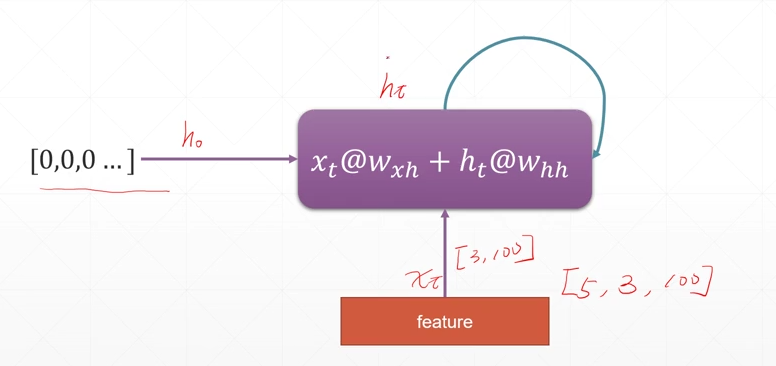
unfolded model
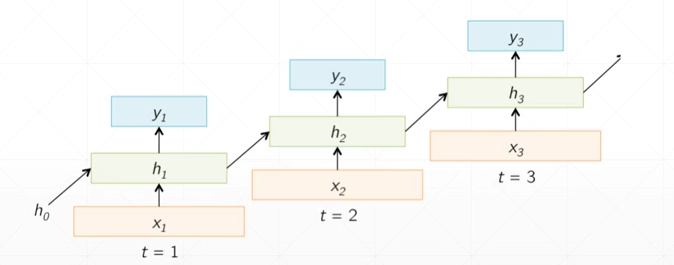
其中的(h_t)可以只是上一次的语义信息,也可以是全部的语义信息的汇总,也可以是中间的语义信息,比较灵活。
nn.RNN
input_size:是word embedding的维度
hidden_size:是memory的size
forward函数:是一步到位的,例如【5,3,100】5个单词不是将数据喂5次,而是一次到位
out,ht = forward(x,h0)
其中h0表示【layer层数,batch,feature数(hidden_size)】
ht表示最后的一个时间语义输出【layer层数,batch数,feature数】
out表示所有的语义输出【单词数,batch数,feature数】
例子:
import torch
rnn = torch.nn.RNN(input_size=100,hidden_size=20,num_layers=1)
print(rnn)
x = torch.randn(10,3,100)#可以理解为一句话10个单词,一共3句话
out,h = rnn(x,torch.zeros(1,3,20))
print(out.shape,h.shape)
RNN(100, 20)
torch.Size([10, 3, 20]) torch.Size([1, 3, 20])
如果RNN是两层的话,ht【2,batch,feature】(纵向)
out还是【10,batch,feature】(横向)
层数变多,纵向发生变化,但是横向的out还是不变的
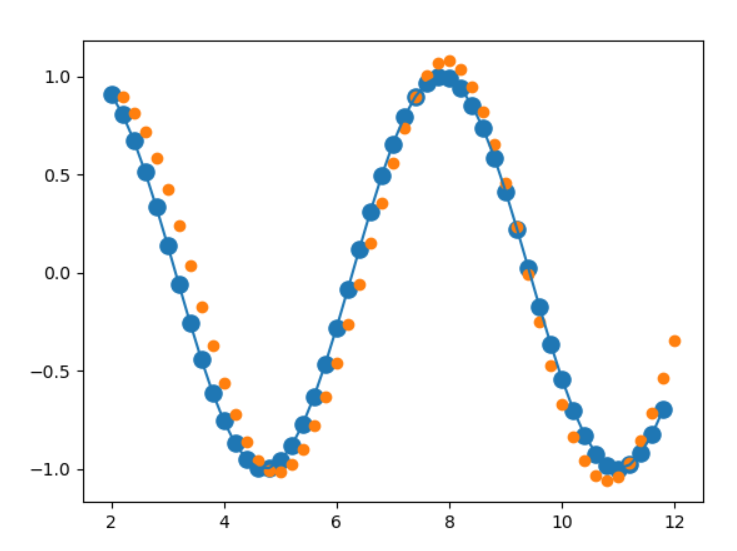
时间序列预测实战
目标:预测sin函数曲线的走向
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from matplotlib import pyplot as plt
num_time_steps = 51#点的数量
input_size = 1#由于是散点,不是单词、汉字,所以数据的 embedding的维度为1
hidden_size = 16
output_size = 1
lr = 0.01
class Net(nn.Module):
def __init__(self):
super(Net,self).__init__()
self.rnn = nn.RNN(
input_size = input_size,
hidden_size = hidden_size,
num_layers=1,
batch_first=True#表示是另外一种表示方法,batch大小在最前
)
self.linear = nn.Linear(hidden_size,output_size)
def forward(self,x,hidden_prev):
out,hidden_prev = self.rnn(x,hidden_prev)
out = out.view(-1,hidden_size)#[1,seq,h]-->[seq,h]
out = self.linear(out)#[seq,h]-->[seq,1]
out = out.unsqueeze(dim=0)#插入一个维度:要与y进行比较(使用MSE)
return out,hidden_prev
model = Net()
criteron = nn.MSELoss()
optimizer = optim.Adam(model.parameters(),lr)
hidden_prev = torch.zeros(1,1,hidden_size)
for iter in range(6000):
start = np.random.randint(3, size=1)[0]
time_steps = np.linspace(start, start + 10, num_time_steps)
data = np.sin(time_steps)
data = data.reshape(num_time_steps, 1)
x = torch.tensor(data[:-1]).float().view(1, num_time_steps - 1, 1)
y = torch.tensor(data[1:]).float().view(1, num_time_steps - 1, 1)
output,hidden_prev = model(x,hidden_prev)
hidden_prev = hidden_prev.detach()
loss = criteron(output,y)
model.zero_grad()
loss.backward()
optimizer.step()
if iter % 100 ==0:
print('iteration :{} loss {}'.format(iter,loss.item()))
start = np.random.randint(3, size=1)[0]
time_steps = np.linspace(start, start + 10, num_time_steps)
data = np.sin(time_steps)
data = data.reshape(num_time_steps, 1)
x = torch.tensor(data[:-1]).float().view(1, num_time_steps - 1, 1)
y = torch.tensor(data[1:]).float().view(1, num_time_steps - 1,)
predictions = []
input = x[:,0,:]#[batch_size seq feature] --> [batch_size feature]
for _ in range(x.shape[1]):
input = input.view(1,1,1)#[batch_size feature] --> [batch_size 1 feature] 意思就是将点数量的那个维度设为1,然后通过这个点以及隐藏层来进行下一个点的预测
(pred,hidden_prev) = model(input,hidden_prev)
input = pred
predictions.append(pred.detach().numpy().ravel()[0])
x = x.data.numpy().ravel()
y = y.data.numpy()
plt.scatter(time_steps[:-1],x.ravel(),s=90)
plt.plot(time_steps[:-1],x.ravel())
plt.scatter(time_steps[1:],predictions)
plt.show()
梯度爆炸与梯度弥散
RNN中的(W_{hh}^k)在进行k次方的变换后可能变为一个非常大的数,也可能是一个非常小的数
梯度爆炸
loss在逐渐减小的过程中突然变大
解决方法:
检测每个参数的grad,当grad大于自己设定的阈值的时候,我们使用它的tensor除以他自己的模,再乘以自己设定的阈值,这样tensor的方向不变,但是大小变为自己设定的最大值(注意是对参数的grad操作,不是对参数本身操作)
例子:
loss.backward()
for p in model.parameters():
print(p.grad.norm())#norm()返回向量 v 的欧几里德范数。此范数也称为 2-范数、向量模或欧几里德长度。
torch.nn.utils.clip_grad_norm_(p,10)
optimizer.step()
梯度消失
由于网络较深等原因导致梯度在回传的时候,后面的层由于梯度较大效果较好,但是前面的层由于计算的原因梯度接近于0,长时间得不到更新,几乎停止了训练。
解决方法:LSTM
LSTM(long short-term memory)
虽然RNN有一个收集所有语义的memory(short term memory),但是实际上它还是对于距离现在时间线较近的word的语义提取较好,离得较远的语义提取汇总较差
原RNN结构

现LSTM结构

LSTM 有通过精心设计的称作为“门”的结构来去除或者增加信息到细胞状态的能力。门是一种让信息选择式通过的方法。他们包含一个 sigmoid 神经网络层和一个 pointwise 乘法操作。

Sigmoid 层输出 0 到 1 之间的数值,描述每个部分有多少量可以通过。0 代表“不许任何量通过”,1 就指“允许任意量通过”!
LSTM 拥有三个门,来保护和控制细胞状态。
逐步理解 LSTM
第一步——遗忘
在我们 LSTM 中的第一步是决定我们会从细胞状态中丢弃什么信息。这个决定通过一个称为忘记门层完成。该门会读取(h_{t-1})和(x_t),输出一个在 0 到 1 之间的数值给每个在细胞状态(C_{t-1})中的数字。1 表示“完全保留”,0 表示“完全舍弃”。
l例如细胞状态可能包含当前主语的性别,因此正确的代词可以被选择出来。当我们看到新的主语,我们希望忘记旧的主语。

第二步——输入
下一步是确定什么样的新信息被存放在细胞状态中。这里包含两个部分。
第一,sigmoid 层称 “输入门层” 决定什么值我们将要更新。
然后,一个 tanh 层创建一个新的候选值向量(这里的输入并不是直接的输入,也是与(h_{t-1})进行了融合),( ilde{C}_t),会被加入到状态中。第三步则是这两个信息来产生对状态的更新。
在我们语言模型的例子中,我们希望增加新的主语的性别到细胞状态中,来替代旧的需要忘记的主语。

第一步与第二步的数据相加

第三步——输出
现在是更新旧细胞状态的时间了,(C_{t-1})更新为(C_t)。前面的步骤已经决定了将会做什么,我们现在就是实际去完成。
我们把旧状态与(f_t)相乘,丢弃掉我们确定需要丢弃的信息。接着加上(i_t * ilde{C}_t)。这就是新的候选值,根据我们决定更新每个状态的程度进行变化。
在语言模型的例子中,这就是我们实际根据前面确定的目标,丢弃旧代词的性别信息并添加新的信息的地方。

三步公式汇总

解决梯度离散问题
由于LSTM有三道门,梯度信息存在相加的情况,所有梯度不会一致出现特别小或者特别大的情况,有效地避免了(w_{hh}^k)地情形