

1 #include <opencv2/opencv.hpp> 2 #include <iostream> 3 4 using namespace cv; 5 using namespace std; 6 Mat src, gray_src; 7 int thresh = 130; 8 int max_count = 255; 9 const char* output_title = "HarrisCornerDetection Result"; 10 void Harris_Demo(int, void*); 11 int main(int argc, char** argv) { 12 13 src = imread("L:/6.jpg"); 14 if (src.empty()) { 15 printf("could not load image... "); 16 return -1; 17 } 18 namedWindow("input image", CV_WINDOW_AUTOSIZE); 19 imshow("input image", src); 20 21 namedWindow(output_title, CV_WINDOW_AUTOSIZE); 22 cvtColor(src, gray_src, COLOR_BGR2GRAY); 23 createTrackbar("Threshold:", output_title, &thresh, max_count, Harris_Demo); 24 //&thresh为滑动窗口初始默认值130 25 Harris_Demo(0, 0); 26 27 waitKey(0); 28 return 0; 29 } 30 31 void Harris_Demo(int, void*) { 32 Mat dst, norm_dst, normScaleDst; 33 dst = Mat::zeros(gray_src.size(), CV_32FC1); 34 35 int blockSize = 2; 36 int ksize = 3; 37 double k = 0.04; 38 cornerHarris(gray_src, dst, blockSize, ksize, k, BORDER_DEFAULT); 39 //参数:输入灰度图像,输出图像,blockSize参数矩阵的大小,ksize窗口大小,k角度响应参数0.04-0.06, 默认 40 normalize(dst, norm_dst, 0, 255, NORM_MINMAX, CV_32FC1, Mat()); 41 //归一化函数:NORM_MINMAX为一般常用的方法,CV_32FC1 输出矩阵与输入矩阵类型相同 42 convertScaleAbs(norm_dst, normScaleDst); 43 //对矩阵取绝对值 44 45 Mat resultImg = src.clone(); 46 // 克隆彩色图片src到resultImg 47 48 for (int row = 0; row < resultImg.rows; row++) { 49 uchar* currentRow = normScaleDst.ptr(row); //行指针,指向一行的数据 50 for (int col = 0; col < resultImg.cols; col++) { 51 int value = (int)*currentRow; //通过指针拿出数据值 52 if (value > thresh) { 53 circle(resultImg, Point(col, row), 2, Scalar(0, 0, 255), 2, 8, 0); 54 //画圆 55 } 56 currentRow++; 57 } 58 } 59 60 imshow(output_title, resultImg); 61 }
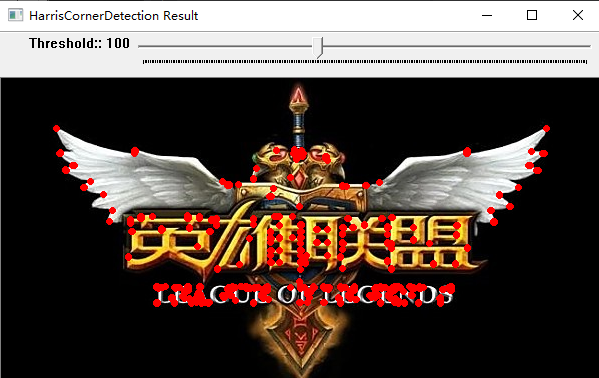
效果: